ответы теор мех
.docx
Механикой называется наука о механическом движении и взаимодействии материальных тел. Теоретической механикой называется наука о наиболее общих законах и методов механики. Делится на: -статику -динамику -кинематику Статика – раздел механики в котором излагается общее учение о силах и условиях равновесия материальных тел, находящихся под действием силы. Абсолютно твердым телом называется тело, расстояние между двумя точками которого не меняется. Линией действия силы называется прямая, вдоль которой направлена сила. Системой сил называется совокупность сил, действующих на данное тело. Тело, которое может совершать свободные перемещения из данной точки называется свободным. Эквивалентными системами сил называются системы, которые можно заменять друг на друга. Уравновешенной системой сил называется такая система, при которой тело находится в покое. Если система сил эквивалентна одной силе, то такая сила называется равнодействующей. |
Аксиома 1. Если на свободное абс. Твердое тело действуют 2 силы, то тело тело может находится в равновесии титтк 2 эти силы равны по величине, противоположны по направлению и лежат на одной прямой. Аксиома 2. Действие системы сил на тело не изменится если к ней прибавить\отнять уравновеш. Систему сил. Следствие: действие силы на тело не изменится если перенести точку приложения силы в любую другую точку тела. Аксиома 3. Две силы, приложенные в одной точке, имеют равнодействующую приложенную к той же точке силу, изображаемую как диагональ параллелограмма, сторонами которого являются исходные силы. Аксиома 4. Два тела действуют друг на друга с силами равными по модулю, но противоположными по направлению. Аксиома 5. Равновесие деформируемого тела находящегося под действием системы сил не изменится если тело считать абсолютно твердым. Все, что ограничивает перемещение данного тела в пространстве называется связью. Сила, с которой данная связь действует на тело, препятствуя его перемещению, называется реакцией связи. Реакция связи существует всегда, если что-то препятствует движению тела. Виды связи: гладкая поверхность, нить, цилиндрический подшипник, неподвижный шарнир, сферический шарнир, невесомый стержень. Аксиома связей. Всякое несвободное тело можно считать свободным, отбросив связи и заменив их действия на тело реакциями связей. |
Сходящейся системой сил называется система у которой линии действия всех сил, пересекаются в одной точке. Сходящуюся систему сил всегда можно заменить одной силой. Главным вектором системы сил называется вектор, равный геом сумме всех сил системы. Сходящаяся система сил равна главному вектору системы сил, приложенному в точке пересечения линии действия сил. Проекция силы на ось есть алгебраическая величин, равная произведению модуля силы на косинус угла между силой и положительным направлением оси. Если угол острый, проекция положительна, если тупой-отрицательна, если прямой, проекция равна 0.
|
Алгебраическим моментом силы называется скалярная величина, равная произведению модуля силы на плечо взятое с соответствующим знаком. Плечем силы относительно точки называется длина перпендикуляра, опущенного из той точки относительно которой вычисляется момент на линию действия сил. Моментом силы относительно точки называется приложенный в этой точке вектор, модуль которого равен F*h и направленный перпендикулярно плоскости, проход через эту точку и линию действия силы в ту сторону откуда сила видна вращающейся против часовой стрелки.
Теорема Вариньона. Если система сил имеет равнодействующую, то момент этой равнодействующей относительно любой точки\оси равен сумме моментов сил системы. |
|
|
|

Система двух сил называется парой сил, если их модули равны, а направления параллельны, но противоположны по направлению.
Моментом пары сил называется произведение модуля одной из сил пары на плечо пары. Плечом пары называется расстояние между линиями действия сил пары. Момент пары равен сумме моментов сил пары относительно любой точки. Теорема об эквивалентности. Две пары сил, имеющих одинаковые моменты, называются эквивалентными.
Любая система пар сил эквивалентна одной паре, момент которой равен сумме моментов пар сил системы. |
Главным вектором системы сил называется вектор равный сумме всех сил системы. Главным моментом системы сил относительно данного центра называется геометрическая сумма моментов сил системы относительно данного центра. |
>
>
>
>
>R┴ M система имеет равнод. Не прох через центр приведения >R║ M система приводится к динамическому винту
>R |
|
|
|
|
Кинематика – раздел механики, в котором изучаются геометрические свойств движения точки или тела вне зависимости от их массы и причин, вызывающих это движение. Кинематика делится на -кинематику точки -кинематику твердого тела Задать движение точки – значит указать способ определения положения точки в пространстве в любой момент времени. >Векторный способ задания движения точки. Положение точки задается радиус-вектором, проведенным в нее из неподвижного центра(полюса). Радиус-вектор является векторный функцией скалярного аргумента – времени t, с течением времени конец вектора описывает в пространстве кривую – траекторию.
|
|
Поступательным называется такое движение твердого тела, при котором любая прямая проведенная в теле во все время движения тела остается параллельной своему начальному положению. При поступательном движении твердого тела скорость и ускорение всех точек тела в каждый момент времени равны, а траектории при наложении совпадают.
|
Вращательным движением называется такое движение твердого тела, при котором 2 какие-либо точки тела или жесткой связки с телом все время движения тела остаются неподвижными
|
|
|
|
Плоскопараллельным называется такое движение тела, при котором траектория точек тела являются плоские линии плоскости, которые параллельны общей неподвижной плоскости. Плоское движение тела однозначно определяется движением сечения этого тела плоскостью, параллельной неподвижной плоскости. |
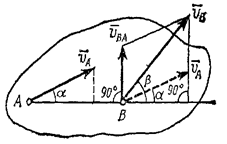
Один
из таких методов дает теорема:
проекции скоростей двух точек твердого
тела на ось, проходящую через эти
точки, равны друг другу. Рассмотрим
какие-нибудь две точки А
и В
плоской фигуры (или тела). Принимая
точку А
за полюс (рис.32), получаем
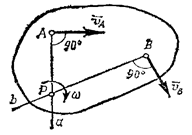
Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
Пусть
в момент времени t
точки А
и В
плоской фигуры имеют скорости
Если
теперь в момент времени
так
как
Из равенств, следует еще, что
|
|
|
|
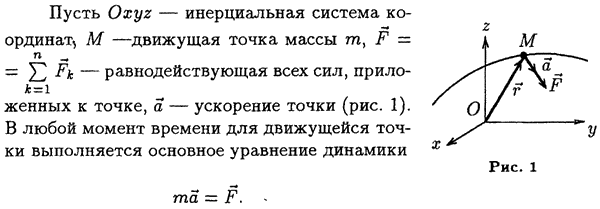
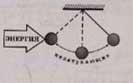
Динамикой называют раздел механики в котором изучают движение материальных точек тел под действием сил. 1-й закон динамики. Изолированная от внешних взаимодействий материальная точка сохраняет состояние покоя или равном прямолинейного движения. 2-й закон динамики. Произведение массы точки на ускорени, которое оно получает под действием силы, равно по модулю этой силе, а направление действия ускорения совпадает. 3-й закон динамики. 2 материальных тела действуют друг на друга с силами, равными по величине, противоположными по направлению и направленными вдоль одной линии. Задачи динамики: - Прямая (нахождение сил по закону движения) - Основная (зная силы, найти закон движения)
|
приложенных к точке. Свободные колебания (собственные), происходящие в представленной самой себе системе около положения равновесия после какого-либо первоначального воздействия.
Рассмотрим
точку М,
движущуюся прямолинейно под действием
одной только восстанавливающей
силы
Любая другая сила, неупругая по природе, но удовлетворяющая соотношению F = – cx, называется квазиупругой. Найдем закон движения точки М. Составляя дифференциальное уравнение движения получим
Деля обе части равенства на т и вводя обозначение
приведем уравнение к виду
Уравнение
представляет собою дифференциальное
уравнение свободных колебаний при
отсутствии сопротивления.
Решение этого линейного однородного
дифференциального уравнения второго
порядка ищут в виде x=ent.
Полагая
x=ent,
получим для определения п
так называемое характеристическое
уравнение, имеющее в данном случае
вид п2
+
|
ЗАТУХАЮЩИЕ КОЛЕБАНИЯ Затухающими называются колебания, энергия и амплитуда которых уменьшается с течением времени. Затухание свободных механических колебаний связано с убыванием механической энергии за счет действия сил сопротивления и трения.
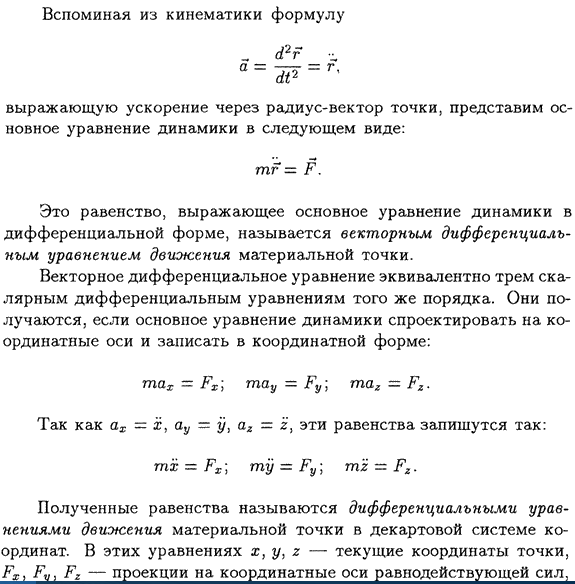
ПРЕВРАЩЕНИЯ ЭНЕРГИИ ПРИ КОЛЕБАТЕЛЬНОМ ДВИЖЕНИИ Колебания маятника возможны благодаря начальному запасу механической энергии, которая придается ему при выведении из положения равновесия. При колебаниях маятника: - в положении равновесия скорость и, следовательно, кинетическая энергия тела максимальны. - потенциальная энергия маятника максимальна, когда кинетическая энергия (скорость) равна нулю.
При движении маятника из положения равновесия в положение с максимальным смещением кинетическая энергия превращается в потенциальную энергию. При перемещении из положения с максимальным смещением в положение равновесия потенциальная энергия переходит в кинетическую.
Если колебания свободные, т.е. трение отсутствует, то выполняется закон сохранения механической энергии: сумма кинетической и потенциальной энергий остается неизменной. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ Вынужденными колебаниями называются незатухающие колебания системы, которые вызываются действием внешней периодической силы.
|
|
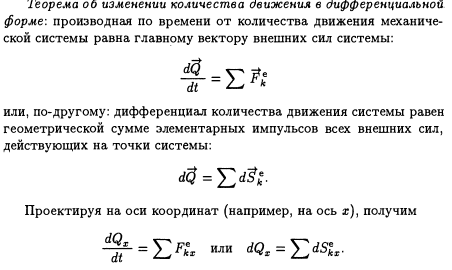
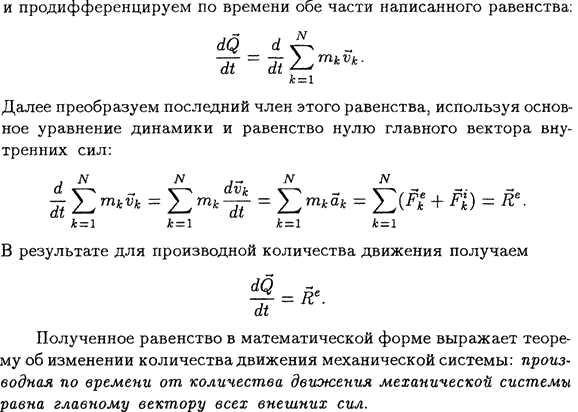
Количеством движения точки называется векторная величина равная произведению массы точки на ее скорость. Импульсом силы за некоторый промежуток времени называется векторная величина равная интегралу от вектора силы за этот промежуток времени. Th: Изменение количества движения точки за некоторый промежуток времени равно сумме импульсов всех сил приложенных в этой точке.
|
Кинетической энергией точки называется скалярная величина равная половине произведения массы точки на квадрат ее скорости. Элементарной работой силы называется скалярное произведение силы на элементарное перемещение. Работой силы при некотором перемещении точки, называется интеграл от элементарной работы по ее перемещению.
Работа силы тяжести = +-Gh Работа силы трения = -fN*(интервал действия) Работа силы упругости = -(с/2)(λ^2конеч-λ^2начальное) Изменение кинетической энергии при некотором перемещении равно сумме работ всех сил, приложенных в точке на этом перемещении. |
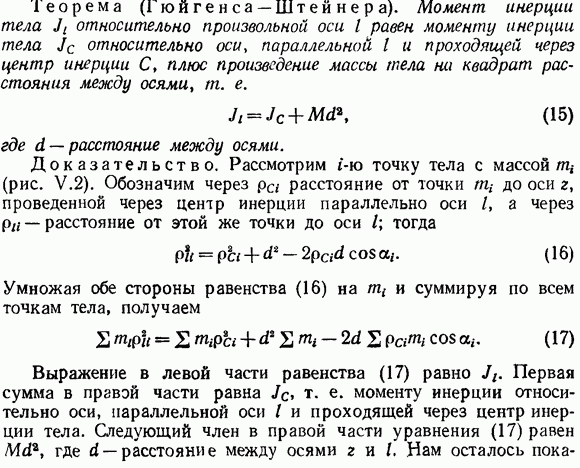
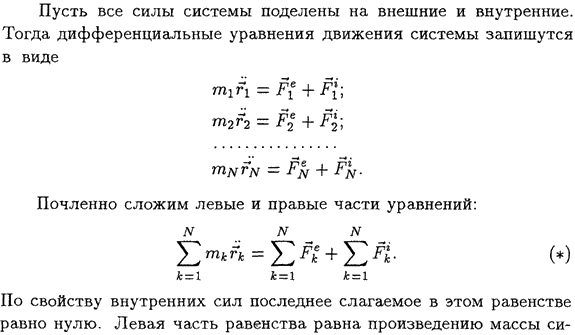
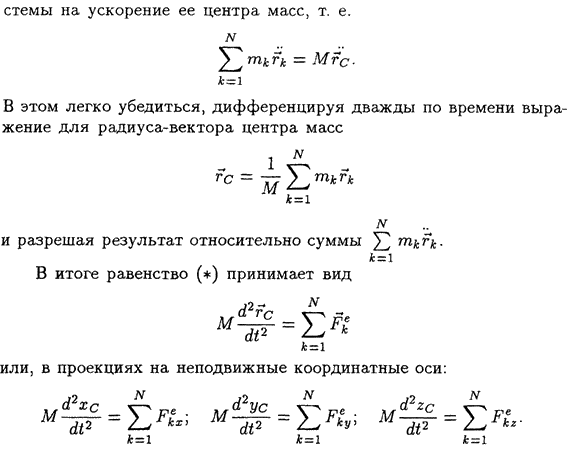
Механической системой называют совокупность материальных точек\тел равновесие или движение которых изучается. Силы, возникающие в результате взаимодействия точек, входящих в систему, называются внутренними. Силы, возникающие в результате взаимодействия с точками не входящих в систему, называются внешними. Массой системы называется сумма всех точек системы. Моментом инерции относительно оси называется сумма произведений масс точек на квадрат расстояния до оси.
|
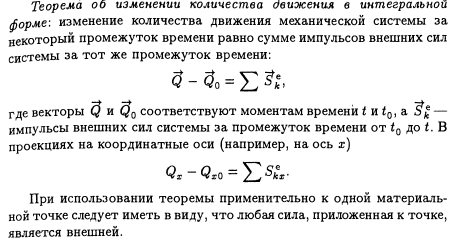
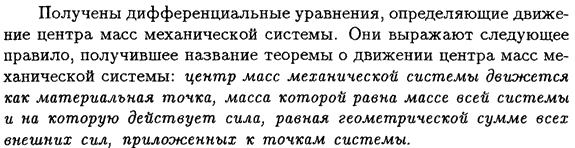
Теорема об изменении количества движения механической системы
|
|
Доказанная
теорема о кинетической энергии точки
справедлива для любой точки си-.
|
|
|
|










 Сила,
вызывающая вынужденные колебания,
называется
вынуждающей или возмущающей силой.
Сила,
вызывающая вынужденные колебания,
называется
вынуждающей или возмущающей силой.