

Лабораторная работа №. 3
Тема: Устройство и принципы работы параметрических и генераторных датчиков. Цель работы: Изучить устройство, принципы работы и вопросы эксплуатации параметрических и генераторных датчиков.
Оборудование:
Металлический термометр сопротивления ДКТ-1.
Датчик контроля положения ленты на роликоопорах КСЛ-2.
Мембранный датчик контроля воздуха к подготовительным забоям.
Электродный датчик ЭД-1 для контроля уровня воды.
Датчик контроля скорой движения ДМ-2М.
СОДЕРЖАНИЕ ОТЧЕТА.
1.Дать общую характеристику датчикам специального назначения.
2.Коротко описать уклад, работу и принцип действия основных видов датчиков.
3.Назначениедатчиков контроля воздуха в подготовительных забоях.
ПРАВИЛА БЕЗОПАСНОСТИ ПРИ ВЫПОЛНЕНИИРАБОТЫ.
1. Соблюдать правило внутреннего распорядкаколледжа.
2. К выполнению работы приступать толькопосле изучения инструкции.
3. Работу выполнять по указанию преподавателя, подчиняясь всем требованиям
звеньевого, назначенного преподавателем.
4. В случае перенесения тяжелых деталей брать их совместно по команде
звеньевого.
5. При работе сэлектрооборудованиемпользоваться инструментом с
изолированными рукоятками и использовать средства индивидуальной защиты
(диэлектрические перчатки, коврики и т.д.)
6. При нарушении нормального режимаработы действующей установки, ее
отключить и сообщить преподавателю об этом.
Ход работы.
Организационная часть.
Разбивка на подгруппы. Назначение звеньевых. Ознакомление с правилами безопасности при выполнении практического задания.
2. Сообщения темы, цели и основных заданий.
3. Актуализация и мотивация учебной деятельности.
Описать устройство и принцип работы термометру сопротивления ДКТ-1.
Описать устройство и принцип работы датчика контроля положения ленти на роликоопорах КСЛ-2.
3.3 Описать устройство и принцип работы мембранногодатчика контроля воздуха в подготовительных забоях.
3.4.Описать устройство и принцип работы електродногодатчика ЭД-1 для контроля уровня воды.
3.5 Описать устройство и принцип работы датчика контроля скорой движения ДМ-2М.
4. Отчет по практической работы.
5. Контроль исходного уровня знаний студентов.
6. Подведение итогов, обобщения материала.
Литература:
ОСНОВНАЯ
Батицкий В.А. Куроедов В.И. Рыжков Н.А. «Автоматизация производственных процессов. АСУТП в горной промышленности». - Г., Недра 1991г.
Демин В.В. «Лабораторный практикум по рудничной автоматике и телемеханике» - Г., Недра 1990г.
Поспелов Л.П. «Основы автоматизации производства». Учеб. Пособие для техникумов. – Г., Недра 1988г.
Лабораторная работа № 3. Датчики специального назначения. Датчики температуры.
Датчики контроля температуры ДКТ-1 (рис. 36) имеют латунную трубку, внутри рабочего конца которой размещается индуктивная катушка на ферритовом сердечнике. При нормальной температуре среды, в которой помещен датчик, индуктивность катушки большая (3000 мкГн). С повышением контролируемой температуры индуктивность катушки уменьшается.
Эти термодатчики подключают к современной аппаратуре контроля температуры АКТ-2, описываемой в гл. 9.
Термодатчики ТД-70 (ТД-100, ТД-150), ТДП-231У, ТДП-232У, используемые комплектно с аппаратурой (АТВ-229 и др.), в качестве чувствительного элемента имеют полупроводниковый терморезистор, расположенный внутри трубки, сопротивление которого резко уменьшается при повышении температуры среды до установленной величины.
Для автоматической защиты от перегрева подшипников электромеханического оборудования, а также автоматического контроля и регулирования различных тепловых процессов большое распространение получили датчики ТДЛ-2, в которых чувствительным элементом является легкоплавкий сплав Вуда.
Термодатчик ТДЛ-2 (рис. 37) имеет латунный наконечник 9, в который сплавом Вуда впаян стержень 8, соединенный через пружину 7 с валиком 5. Такое соединение, заменяющее храповой механизм, обеспечивает относительный поворот стержня и валика 1 только в направлении разворота витков пружины 12, нижний конец которой через втулку 6 соединен с валиком, а верхний — закреплен в корпусе датчика.
При подготовке датчика к защите поворотом ручки 1 на 90° по часовой стрелке, валиком заводится пружина 12 и замыкаются контакты 2. При нагреве наконечника до температуры размягчения сплава (65—75 °С) стержень освобождается, и подвижная часть, разворачиваясь, размыкает (или замыкает) контакты. После устранения причины перегрева и остывания сплава поворотом ручки датчик приводится в рабочее состояние.
В корпусе подшипника термодатчик ТДЛ-2 крепится штуцером 3, который опирается на проволочное кольцо 4, установленное в одной из выточек 11 трубки 10 в зависимости от требуемой глубины установки.
Датчик ТДЛ-2 имеет два кабельных ввода и контакты, рассчитанные на ток отключения до 3 А при напряжении 380 В. Он имеет диаметр рабочей части 15 мм и обеспечивает максимальную глубину со установки 90 мм.
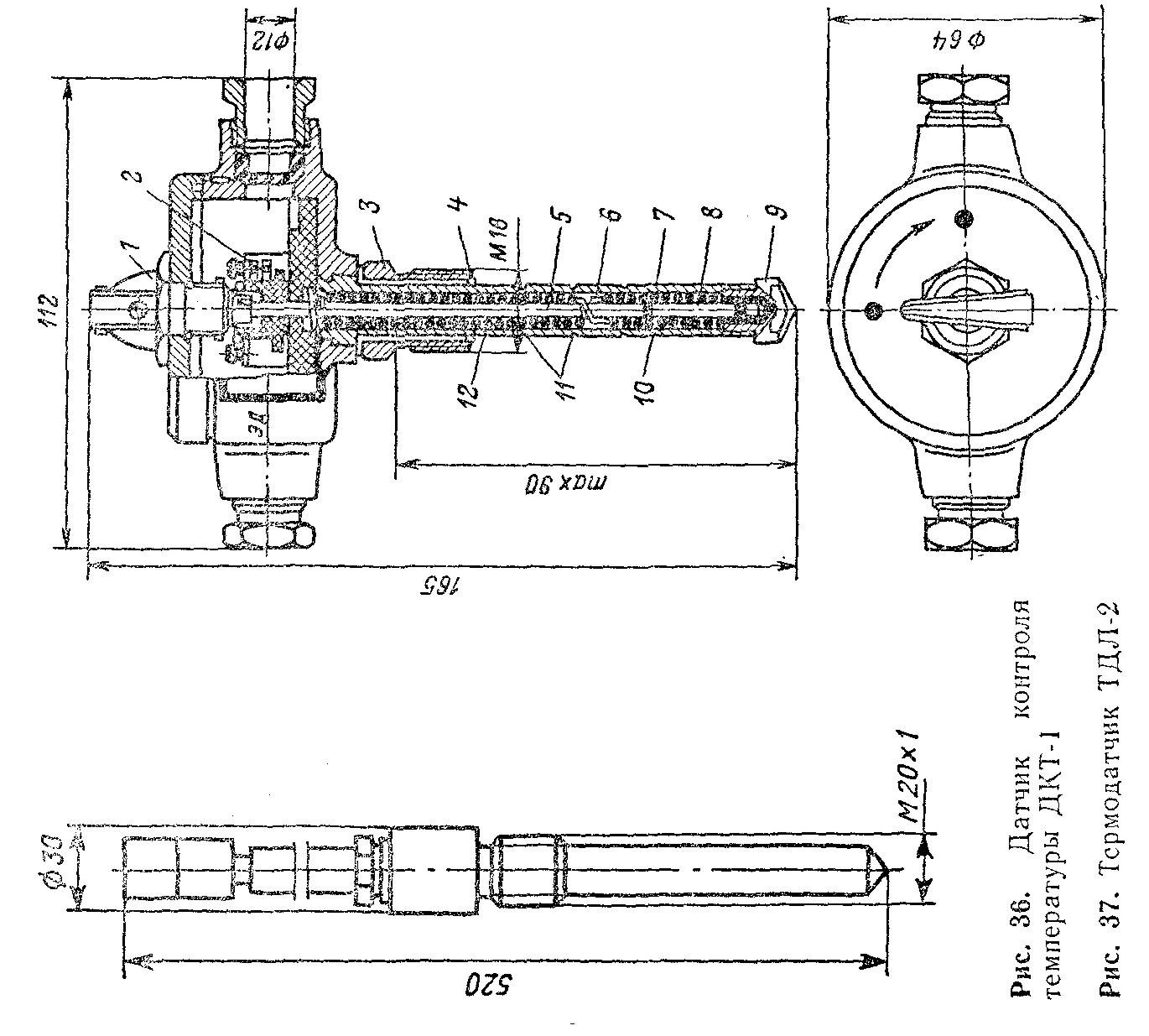
Рис. 36. Датчик контроля температуры ДКТ-1
Рис. 37. Термодатчик ТДЛ-2
Для контроля положения ленты на роликоопорах конвейеров используют датчик контроля схода ленты КСЛ-2 (рис. 40) с магнитоуправляемыми герметизированными контактами МКВ-1.
В корпусе 2 с крышкой 1 расположено исполнительное устройство, состоящее из магнитной кольцевой системы 5 и магнитоуправляемого контакта в капсуле 6, ввернутой в шайбу 4 и зафиксированной гайкой 3. Гибкий привод датчика состоит из пружины 7, гибкого троса 8, восьми конических шайб 10 и резинового гофрированного кожуха 9. При этом гибкий трос связывает магнитную систему с зажимом 11.
Выводы магнитоуправляемых контактов подключены к клеммам 13, к которым присоединены жилы кабеля, пропущенного через один из вводов 14. С помощью металлической планки 12 датчик крепят на роликоопоре грузовой ветви конвейера.
При сходе ленты и воздействии ее на гибкий тросовой привод, что вызывает отклонение его вершины на 50—70 мм в любую сторону от центрального положения, происходит перемещение кольцевой магнитной системы вдоль капсулы с МКВ-1 и контакты
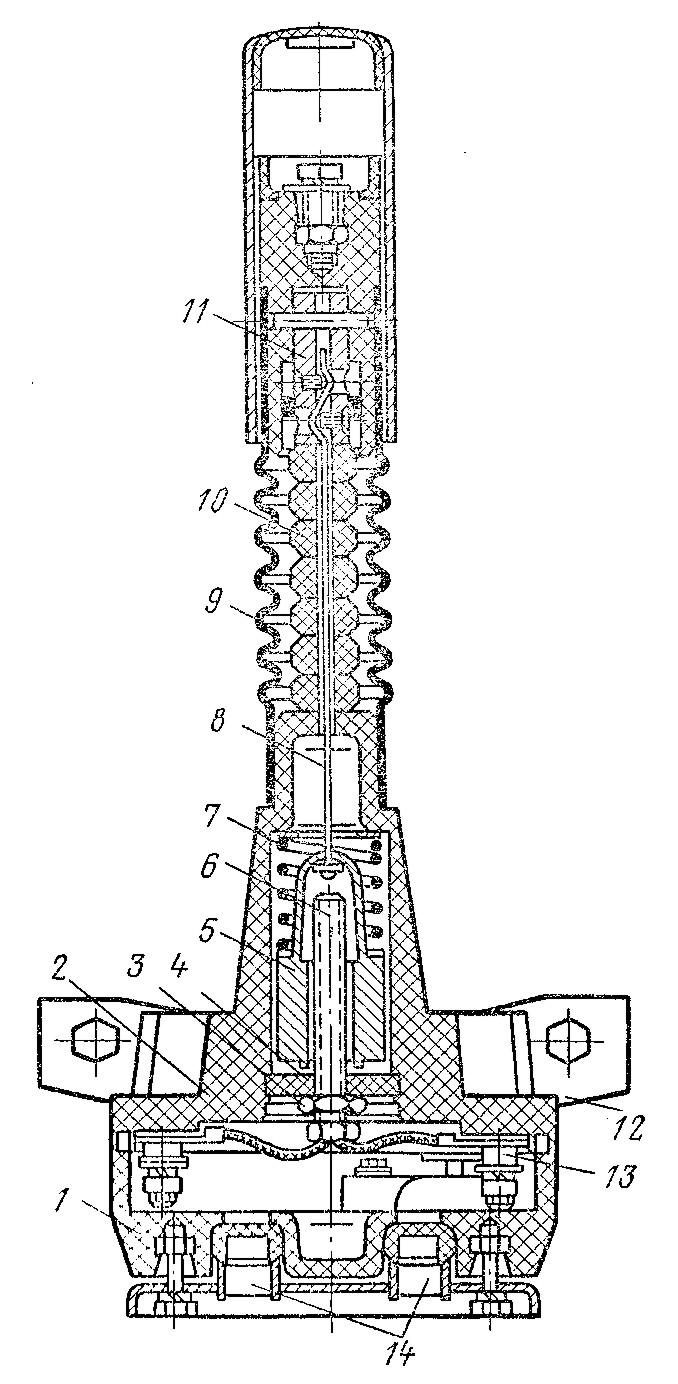
Рис. 40. Датчик контроля схода ленты КСЛ-2
замыкаются или размыкаются. После прекращения отклоняющего воздействия ленты на привод датчика пружина возвращает магнитную систему в исходное положение и контакты занимают первоначальное положение.