

Методичка по электротехнике (лаб роб) 2
.pdfM |
C |
|
E 2 SR |
|
(8.18) |
|
|
M |
1 |
2 |
|
||
|
|
|
|
|||
|
R 2 |
|
SX |
2 |
2 |
|
|
2 |
|
|
|
|
|
где |
CM |
C |
|
|
|||
4,44k1k2W1 f1 |
|||
|
|
Если задаваться различными значениями S , то, пользуясь (8.18), можно определить соответствующие ему значения момента и построить график зависимости M = f (S) , характер которой показан на рис. 8.12.
На этом графике можно отметить значения четырех характерных точек
-моментов:
1)начального пускового Mn,при S=I;
2)максимального Mmax соответствующего критическому скольжению
SK;
3) M = 0, которое соответствует величине S=0 (режим идеального холостого хода двигателя);
4) номинального MH, соответствующее номинальному скольжению SH (в этом режиме двигатель развивает номинальную мощность Р2H).
Отношение максимального момента к номинальному определяет перегрузочную способность двигателя. Обычно эта величина равна 2...3 и приведена в каталогах.
Используя (8.18) и (8.4), можно построить механическую характеристику асинхронного двигателя nH=f(M), общий вид которого показан на рис.8.13. Механическая характеристика позволяет установить, с какой скоростью будет вращаться ротор двигателя при заданном моменте на его валу.
71

Рис. 8.13
Из анализа механической характеристики следует, что скорость асинхронного двигателя при увеличении момента на валу от нуля до максимального изменяется незначительно. Поэтому, в указанных пределах изменения момента механическая характеристика считается жесткой. При повышении нагрузки свыше максимальной двигатель входит в область неустойчивого режима работы и останавливается.
Наряду с рассмотренными зависимостями наглядно иллюстрируют механические свойства двигателя его рабочие характеристики (рис. 8.14). Они получены при номинальном напряжении сети и дополнительном сопротивлении в цепи ротора RP=0 и называются естественными.
При работе двигателя в обычных условиях с практически достаточной точностью можно считать, что U1 ≈ Е1. Это позволяет сделать вывод, что вращающий момент [см. (8.I8)] асинхронного двигателя пропорционален квадрату напряжения сети. Поэтому даже незначительное изменение напряжения сети вызывает существенное изменение момента двигателя. Например, при снижении напряжения на 10% момент уменьшается на 19%. Если выражение (8.18) продифференцировать по скольжению и приравнять к нулю, определим скольжение, при котором вращающий момент максимален. Это скольжение называется критическим:
S |
|
R2 |
(8.19) |
|
К |
X |
|
||
|
|
2M |
|
|
Критическое скольжение с увеличением активного сопротивления растет, максимальный момент не изменяется. Это видно из формулы максимального момента, которую мы получаем из (8.18), подставляя вместо S значение SK из (8.19):
72

Рис 8.14
(8.20)
Важным показателем трехфазного асинхронного электродвигателя является его коэффициент мощности
|
cos |
или |
cos |
|
|
|
|
P1 |
(8.21) |
1 |
|
|
|
|
|
|
3 U1 I1 |
||||
|
|
|
|||
|
I1a |
(8.22) |
|||
1 |
I |
|
|
|
|
|
1 |
|
|
|
|
где I1a - активная составляющая тока I1.
С ростом нагрузки активная составляющая тока растет, реактивная (намагничивающая) составляющая почти не меняется. Поэтому при холостом ходе двигателя его коэффициент мощности довольно низок - порядка 0,1...0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,7...О,9) при нагрузке, близкой к номинальной.
Относительно низкий COS φ1 установки с асинхронным двигателем можно повысить подключением на выводы обмотки статора батареи конденсаторов. Значение емкости, необходимой для подключения на одну фазу двигателя, определяют из условия равенства реактивной составляющей тока статора и тока через емкость по формуле:
С=P1 (tg φ1-tg φ)·109/2π f1 U1 |
2 |
(8.23) |
где Р1 - активная мощность двигателя, кВт; φ1 и φ - угол сдвига фаз соответственно до компенсации и после нее.
В целях уменьшения габаритов конденсаторной батареи емкости включают по схеме "треугольник". При этом значение емкости каждой ветви уменьшается в 3 раза по сравнению с величиной, рассчитанной по
(8.23).
Коэффициент полезного действия асинхронного двигателя определяется отношением мощности P2 к подводимой P1,
73
р2 |
(8.24) |
|
р1 |
||
|
Разность между мощностями определяет суммарные потери в двигателе. Их можно разделить на постоянные, практически не зависящие от нагрузки, и переменные, зависящие от нее. Постоянные потери - потери в стали и механические, переменные - потери на нагревание проводников обмотки статора и ротора. Переменные потери - добавочные потери, которые возникают вследствие изменения при вращении ротора относительного положения зубцов статора и ротора, что вызывает изменения магнитного сопротивления и пульсации потока. Одним из средств уменьшения этих потерь служит скос пазов ротора по отношению к пазам статора.
Коэффициент полезного действия двигателя достигает максимального значения (65...95%), когда переменные потери равны постоянным. У большинства двигателей такой высокий КПД возникает при нагрузке, равной примерно 75% номинальной.
8.2 Описание лабораторной установки
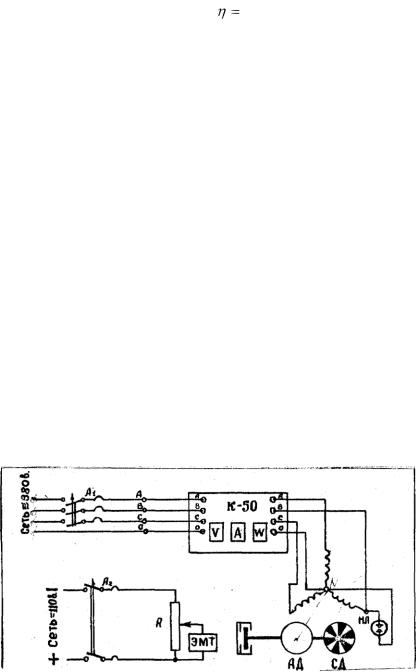
Принципиальная электрическая схема лабораторной установки показана на рис. 8.17 и 8.18.
Рис. 8.17
Для создания на валу двигателя нагрузки заданной величины в установке используется тормоз Панасенкова (рис. 8.18). Его основная часть - четырехполюсной магнит, который может свободно перемещаться относительно своей оси. На конце вала электромагнита укреплены груз (известного веса) и указывающая стрелка. Между полюсными наконечни-
74

ками электромагнитов свободно, без зацепления с полюсами вращается стальной диск, жестко укрепленный на валу исследуемого асинхронного двигателя. При вращении ротора этот диск пересекает магнитное поле электромагнита благодаря чему в диске наводятся вихревые токи..
Рис. 8.18
Взаимодействие вихревых токов диска с магнитным полем полюсов электромагнита создает для двигателя тормозной момент, уравновешиваемый грузом, Н*м:
MT = 9,81 G l sin α |
(8.25) |
где G - вес груза, кг; l - плечо действия груза, м; α - угол отклонения груза (указывающей стрелки).
При изменении тока в обмотке электромагнита посредством реостата R (ем. рис. 8.17) можно менять тормозной момент и нагрузку на валу двигателя.
Для определения скольжения и скорости вращения ротора двигателя в установке использовано специальное устройство на основе стробоскопического метода.
Устройство имеет диск СД, насажанный на вал ротора двигателя и разделенный на шесть одинаковых белых и черных секторов в соответствии с числом полюсов исследуемого двигателя. Диск освещается неоновой лампочкой НЛ (см. рис. 8.17), которая питается от той же сети, что и обмотка статора двигателя (лампочка питается от стационарной проводки и загорается сразу после подачи напряжения на двигатель).
При вращении ротора и освещении диска СД неоновой лампочкой в результате стробоскопического эффекта наблюдается кажущееся медленное вращение секторов со скоростью n1 - n2 против направления вращения ротора. Если определить кажущееся число оборотов диска Δn за время t , то можно найти
60 |
n |
(8.26) |
|
n1 n2 |
|
|
|
|
t |
||
|
|
|
|
а затем значение скольжения по формуле (8.3) и скорость n2 по формуле (8.4).
75

При известном тормозном моменте МТ и скорости вращения ротора n2 можно определить полезную мощность на валу двигателя
P2=MT n2 / 9550 |
(8.27) |
Напряжение сети UФ, ток I1 и мощность P1 , потребляемые обмоткой статора, измеряются на установке измерительным комплектом К-50 (К-505). Этот прибор показывает значения измеряемых величин только для одной фазы в соответствии с положением переключателя фаз, расположенного на лицевой панели. Чтобы получить информацию о значениях напряжения, тока и мощности в каждой фазе двигателя необходимо переключатель фаз ставить поочередно в положении "А", "В" и "С". Активная мощность, потребляемая двигателем, определяется как сумма показаний ваттметра во всех трех фазах, т.е.
p1  pA pB pC
pA pB pC
а средний ток в,фазе статора
I |
|
I A I B IC |
1 |
3 |
|
|
|
Установка укомплектована трехфазным асинхронным двигателем ТФ-16-6, применяемым в текстильной промышленности на чесальных машинах ЧМ450. Двигатель ТФ-16-6 имеет следующие паспортные данные:
Мощномтьна валу P2 НОМ |
1,1кВт |
|||
Линейное напряжение U1НОМ |
220/ 380В |
|||
Ток |
I1НОМ |
4,52 / 2,6 А |
|
|
Частота f1 |
50Гц |
|
|
|
Скорость вращения n2 НОМ |
950об / мин |
|||
КПД |
НОМ |
0,81 |
|
|
Коэффициент мощности |
cos |
1НОМ 0,79 |
||
На установке можно исследовать любые другие асинхронные двигатели.
8.3Порядок проведения опытов
1.Ознакомиться с приборами, аппаратами и оборудованием исследуемой установки и записать в протокол испытания их технические характеристики.
2.Ознакомиться с устройством и принципом действия асинхронного трехфазного короткозамкнутого электродвигателя.
3.Собрать схему для испытания асинхронного трехфазного короткозамкнутого электродвигателя согласно рис. 8.17.
76

4. Запустить электродвигатель и исследовать его работу в режиме холостого хода (тормоз Панасенкова отключен от сети). Записать показания всех измерительных приборов и по секундомеру определить время Δt за которое стробоскопический диск сделает Δn кажущихся оборотов. Результаты опыта внести в табл. 8.8.
5. Исследовать работу двигателя в режиме нагрузки [тормоз Панасенкова подключен к сети). Для этого, плавно увеличивая постоянный ток в катушках полюсов электромагнитного тормоза, добиваться отклонения стрелки по шкале через каждые 10 до 90° и при каждом новом положении записывать показания всех приборов, а по секундомеру определять время Δt, за которое стробоскопический диск сделает Δn кажущихся оборотов. Результаты опытов внести в табл. 8.2.
8.4Обработка результатов опытов
1.Для всех проделанных опытов рассчитать линейное напряжение U1 , ток I1, мощность P1, момент M , скольжение S , скорость ротора n2 , мощность на валу P2 , коэффициент мощности cos φ1 , KПД η. Для последнего опыта рассчитать емкость С . Результаты расчетов записать в табл. 8.2.
2.По результатам расчетов построить в одной координатной системе рабочие характеристики электродвигателя:
M=f(P2); S=f(P2); n2= f(P2); cosφ1= f(P2); η= f(P2);
в другой координатной системе - механическую характеристику n2= f(M) в третьей - характеристику M=f(S).
3. Сравнить для номинального режима работы опытные и расчетные данные до и после компенсации угла сдвига фаз и сделать соответствующие выводы.
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 8.2 |
|
|
|
|
|||
Данные опытов |
|
|
|
|
|
|
Результаты расчетов |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
1 |
|
UФ |
IA |
IB |
IC |
|
PA |
PB |
PC |
Δn |
Δt |
α |
U1 |
I1 |
P1 |
|
M=M |
n2 |
P2 |
η |
Cosφ |
S |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
А |
А |
А |
|
Вт |
Вт |
Вт |
об |
с |
град |
В |
А |
Вт |
|
Н*м |
Об/ми |
кВт |
% |
|
мкФ |
|
|
н |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание U1 
 3
3  UФ
UФ
8.5Контрольные вопросы
1.Устройство статора и ротора трехфазного асинхронного короткозамкнутого электродвигателя.
2.Как определить начало и конец каждой фазы обмотки статора при отсутствии заводской маркировки?
77
3.Как определить схему соединения фаз обмотки статора?
4.Принцип действия асинхронного трехфазного короткозамкнутого электродвигателя.
5.Как определить скольжение двигателя стробоскопическим методом?
6.Принцип реверса двигателя.
7.По какой формуле рассчитать момент на валу двигателя мощность и cos φ1 при любой нагрузке?
8.Зависимость момента вращения двигателя от скольжения.
9.Почему падает скорость двигателя с увеличением момента нагрузки на его валу?
10.Почему изменяется ток статора с изменением нагрузки двигателя?
11.Почему с увеличением нагрузки двигателя момент вращения,. скольжение и коэффициент мощности увеличиваются?
12.По какой формуле подсчитать емкость, необходимую для полной компенсации реактивной мощности двигателя при номинальной нагрузке?
13.Как изменяется КПД с увеличением нагрузки двигателя?
14.Преимущества и недостатки асинхронных трехфазных короткозамкнутых электродвигателей.
78
СПИСОК ЛИТЕРАТУРЫ
1.Буштян Л.В., Обуховский М.П., Тарасов В.И. Рекомендации по применению стендов УИЛС-1 в учебном процессе. –Одесса ОПИ, 1982
2.Электротехника: Учебник для вузов / Под ред. В.Г.Герасимова. –3-е изд.. перераб и доп. –М.: Высш. шк., 1995. –479с.
3.Паначевний Б.Ш. Курс електротехніки: Підручник. – Харків: Торнадо,
1999. – 288с.
79
СОДЕРЖАНИЕ |
|
|
Предисловие ............................................... |
3 |
|
Павила внутреннего распорядка и органиации |
|
|
работы в лаборатории ................................ |
3 |
|
Техника безопасности проведения лабораторных |
|
|
работ на стендах УИЛС-1.......................... |
4 |
|
Оформление расчѐтов ................................ |
5 |
|
Защита отчѐта о лабораторной работе ..... |
6 |
|
Лаб.раб.№1 «Исследование простых цепей |
|
|
постоянного тока»...................................... |
8 |
|
Лаб.раб.№2 «Исследование и расчѐт сложных |
|
|
цепей постояннго тока».......................... |
14 |
|
Лаб.раб.№3 «Исследование цепи синусоедального |
|
|
тока с последовательным соединением |
|
|
R, L, C элементов» ................................... |
22 |
|
Лаб. раб.№4 «Исследование цепи переменного тока |
|
|
с параллельным соединением R, L C элементов» |
30 |
|
Лаб. раб.№5 «Исследование трѐхфазных цепей |
|
|
при соединении приѐмников звездой»... |
37 |
|
Лаб раб.№6 «Исследование трѐхфазных цепей при |
|
|
соединении приѐмников треугольником»45 |
|
|
Лаб.раб. №7 «исследование однофазного |
|
|
трансформатора» ..................................... |
53 |
|
Лаб.раб.№8 «Испытание трѐхфазного асинхронного |
|
|
электродвигателя с короткозамкнутым ротором» |
63 |
|
Список литературы .................................. |
79 |
|
80