

кр мелеш / Сигнал_1_1
.docx
 1.
РОЗРАХУНОК
ПАРАМЕТРІВ ЗОНДУЮЧОГО СИГНАЛУ ІМПУЛЬСНОЇ
РЛС, ВИБІР ТИПУ СИГНАЛУ, РОЗРОБКА
ФУНКЦІОНАЛЬНИХ СХЕМ ГЕНЕРАТОРА І
УЗГОДЖЕНОГО ФІЛЬТРУ, ПОБУДОВА ФУНКЦІЇ
АВТОКОРЕЛЯЦІЇ
1.
РОЗРАХУНОК
ПАРАМЕТРІВ ЗОНДУЮЧОГО СИГНАЛУ ІМПУЛЬСНОЇ
РЛС, ВИБІР ТИПУ СИГНАЛУ, РОЗРОБКА
ФУНКЦІОНАЛЬНИХ СХЕМ ГЕНЕРАТОРА І
УЗГОДЖЕНОГО ФІЛЬТРУ, ПОБУДОВА ФУНКЦІЇ
АВТОКОРЕЛЯЦІЇ
1.1 Класифікація зондуючих сигналів і спосіб побудови ФМ сигналів на основі М-послідовності
Сигнали, які
застосовуються в радіоелектронних
системах, класифікують по тривалості
та по величині добутку тривалості
сигналу
 на ширину його спектра
на ширину його спектра
 (базі сигналу
(базі сигналу
 ).
За тривалістю сигнали підрозділяються
на безперервні, квазібезперервні та
імпульсні, а за базою на прості (
).
За тривалістю сигнали підрозділяються
на безперервні, квазібезперервні та
імпульсні, а за базою на прості ( )
та складні (
)
та складні ( ).
).
Складні сигнали
характеризуються значно більшою шириною
спектру, ніж прості сигнали, у яких
ширина спектру оцінюється як
 .
Розширення спектру складного сигналу
в порівнянні з величиною
.
Розширення спектру складного сигналу
в порівнянні з величиною
 досягається шляхом внутриімпульсної
модуляції або маніпуляції одного або
декількох параметрів сигналу. Сьогодні
найбільш широко застосовуються частотна
модуляція (лінійна і нелінійна) та фазова
маніпуляція (біфазні та багатофазні
сигнали).
досягається шляхом внутриімпульсної
модуляції або маніпуляції одного або
декількох параметрів сигналу. Сьогодні
найбільш широко застосовуються частотна
модуляція (лінійна і нелінійна) та фазова
маніпуляція (біфазні та багатофазні
сигнали).
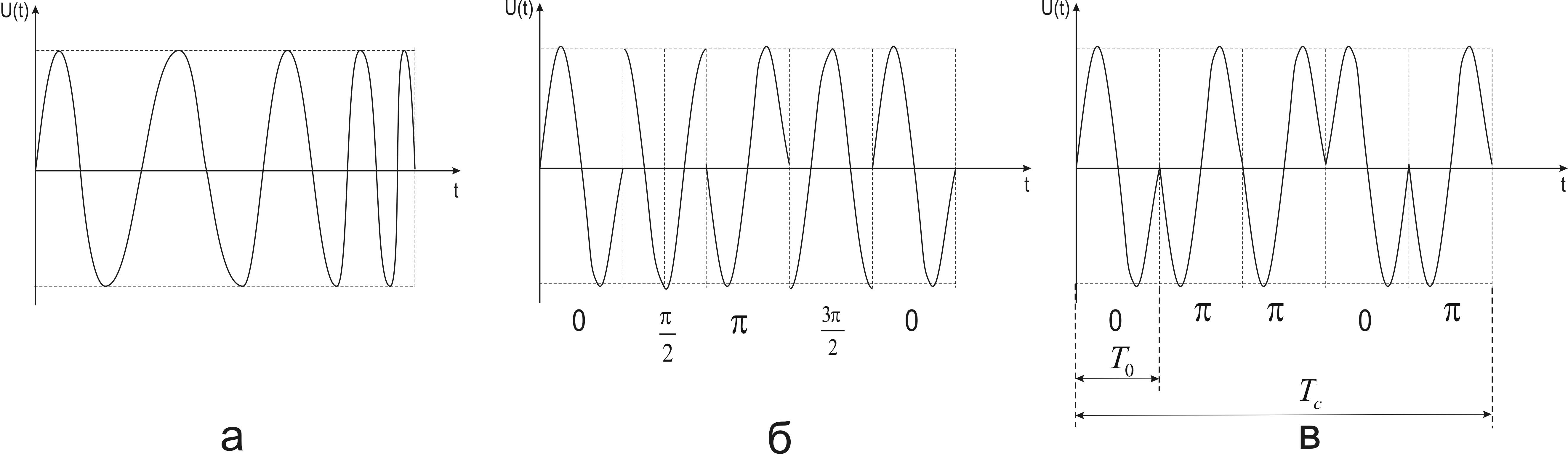
Рис. 1.1 – Складні сигнали
а) ЛЧМ сигнал; б) багатофазний ФМ сигнал; в) біфазний ФМ сигнал
 В
свою чергу сигнали з внутріімпульсною
фазовою маніпуляцією класифікують за
законом зміни фази (кодом). Найбільш
відомі фазоманіпульовані (ФМ) сигнали,
кодовані кодами Баркера, М-послідовностями,
кодами Френка та іншими кодами.
В
свою чергу сигнали з внутріімпульсною
фазовою маніпуляцією класифікують за
законом зміни фази (кодом). Найбільш
відомі фазоманіпульовані (ФМ) сигнали,
кодовані кодами Баркера, М-послідовностями,
кодами Френка та іншими кодами.
Коди
максимальної довжини, що часто називають
М-послідовностями, є найважливішим
для практики радiотехнічних систем . Ці
коди будують частіше всього на основі
перевірочного (генераторного) полiнома
 ,
що являється неприводимим над полем
,
що являється неприводимим над полем
 первісним поліномом ступеня
первісним поліномом ступеня
 :
:
 (1.1)
(1.1)
де
 приймає значення 0 або 1.
приймає значення 0 або 1.
Тоді довжина М-послідовності:
 (1.2)
(1.2)
1.2 Формування ФМ сигналу на основі М-послідовності
Використовуючи вхідні дані знайдемо число позицій фазоманіпульованого сигналу.
Вхідні дані до варіанта по списку №12:
|
Ec=19 Дж |
Pu=1 МВт |
δD=105 м |
Як відомо енергія сигналу визначається слідуючим виразом:
 (1.3)
(1.3)
Тоді тривалість сигналу:
 (1.4)
(1.4)
Тривалість одного елементарного імпульсу:
 (1.5)
(1.5)
Тоді довжина М-послідовності:
 (1.6)
(1.6)
Знайдемо найблищий показник степеня поліному:
 .
(1.7)
.
(1.7)

Довжина М-послідовності:
 (1.8)
(1.8)
З довідникових таблиць первісний неприводимий поліном:
 (1.9)
(1.9)
Початкова комбінація – 1000
Відповідно
до поліному побудуємо узагальнену
функціональну схему регістра зсуву зі
зворотним зв’язком (рис. 1.2), де символ
 означає підсумовування по модулю 2
означає підсумовування по модулю 2
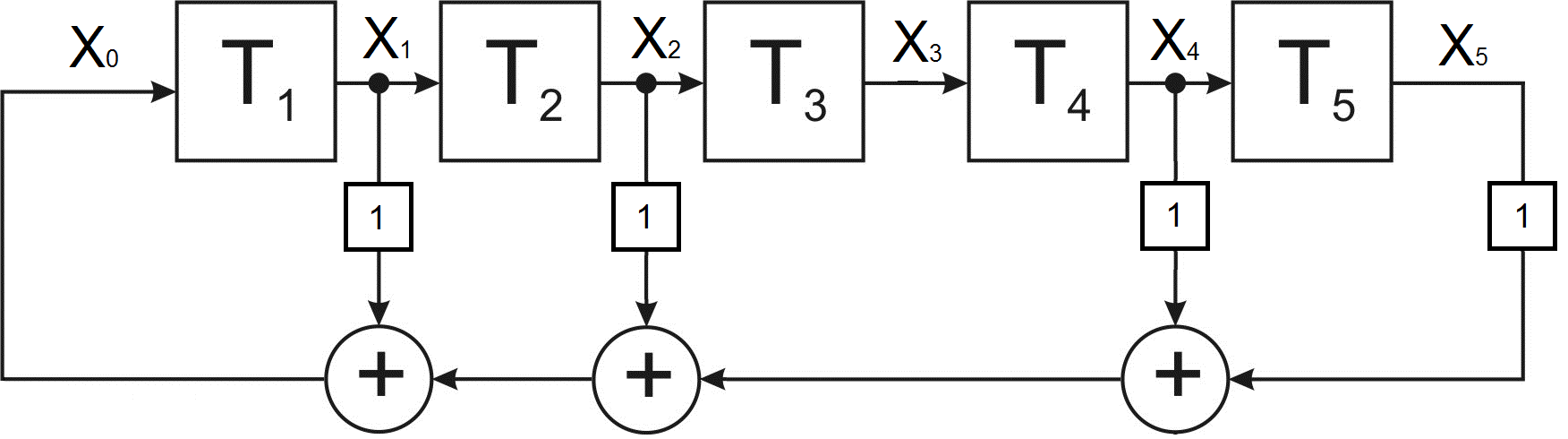
Рис. 1.2 – Узагальнена функціональна схема регістра зсуву зі зворотним зв’язком
З рис. 1.2 безпосередньо витікає, що на вхід регістра подається сигнал зворотного зв’язку:
 (1.10)
(1.10)
В таблиці 1.1, відповідно функціональній схемі, розраховано значення станів регістрів при різних тактах.
 Таблиця
1.1
Таблиця
1.1
|
n |
x0 |
x1 |
x2 |
x3 |
x4 |
X5 |
|
0 |
1 |
0 |
0 |
0 |
1 |
0 |
|
1 |
0 |
1 |
0 |
0 |
0 |
1 |
|
2 |
1 |
0 |
1 |
0 |
0 |
0 |
|
3 |
1 |
1 |
0 |
1 |
0 |
0 |
|
4 |
1 |
1 |
1 |
0 |
1 |
0 |
|
5 |
1 |
1 |
1 |
1 |
0 |
1 |
|
6 |
1 |
1 |
1 |
1 |
1 |
0 |
|
7 |
0 |
1 |
1 |
1 |
1 |
1 |
|
8 |
1 |
0 |
1 |
1 |
1 |
1 |
|
9 |
1 |
1 |
0 |
1 |
1 |
1 |
|
10 |
0 |
1 |
1 |
0 |
1 |
1 |
|
14 |
0 |
0 |
1 |
1 |
0 |
1 |
|
12 |
1 |
0 |
0 |
1 |
1 |
0 |
|
13 |
1 |
1 |
0 |
0 |
1 |
1 |
|
14 |
1 |
1 |
1 |
0 |
0 |
1 |
|
15 |
0 |
1 |
1 |
1 |
0 |
0 |
|
16 |
0 |
0 |
1 |
1 |
1 |
0 |
|
17 |
0 |
0 |
0 |
1 |
1 |
1 |
|
18 |
0 |
0 |
0 |
0 |
1 |
1 |
|
19 |
1 |
0 |
0 |
0 |
0 |
1 |
|
20 |
1 |
1 |
0 |
0 |
0 |
0 |
|
21 |
0 |
1 |
1 |
0 |
0 |
0 |
|
n |
x0 |
x1 |
x2 |
x3 |
x4 |
X5 |
|
22 |
1 |
0 |
1 |
1 |
0 |
0 |
|
23 |
0 |
1 |
0 |
1 |
1 |
0 |
|
24 |
1 |
0 |
1 |
0 |
1 |
1 |
|
25 |
0 |
1 |
0 |
1 |
0 |
1 |
|
26 |
0 |
0 |
1 |
0 |
1 |
0 |
|
27 |
1 |
0 |
0 |
1 |
0 |
1 |
|
28 |
0 |
1 |
0 |
0 |
1 |
0 |
|
29 |
0 |
0 |
1 |
0 |
0 |
1 |
|
30 |
0 |
0 |
0 |
1 |
0 |
0 |
|
31 |
1 |
0 |
0 |
0 |
1 |
0 |
 Послідовність
в колонці
Послідовність
в колонці
 є періодичною з періодом
є періодичною з періодом
 ,
тобто є М-послідовністю довжини 31:
,
тобто є М-послідовністю довжини 31:
 .
Доречно зауважити, що послідовність
символів в будь-якій точці регістра
зсуву з зворотним зв’язком також є
М-послідовністю.
.
Доречно зауважити, що послідовність
символів в будь-якій точці регістра
зсуву з зворотним зв’язком також є
М-послідовністю.
Між
значеннями кода
 та М-послідовності
та М-послідовності
 існує така відповідність:
існує така відповідність:
 (1.11)
(1.11)
Згідно з (1.11) код біфазного ФМ сигналу є:
 (1.12)
(1.12)
Його комплексна огинаюча наведена на рис. 1.3 наведено сам ФМ сигнал.
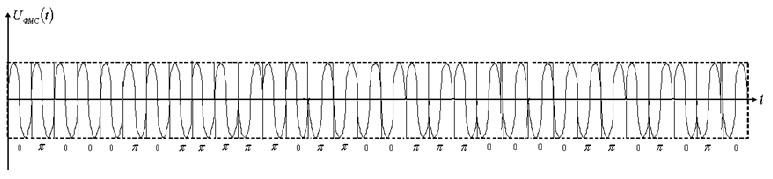
Рис. 1.3 – Сигнал на основі М-послідовності
Приведемо структурну схему генератора синтезованого ФМ сигналу (рис. 1.4)
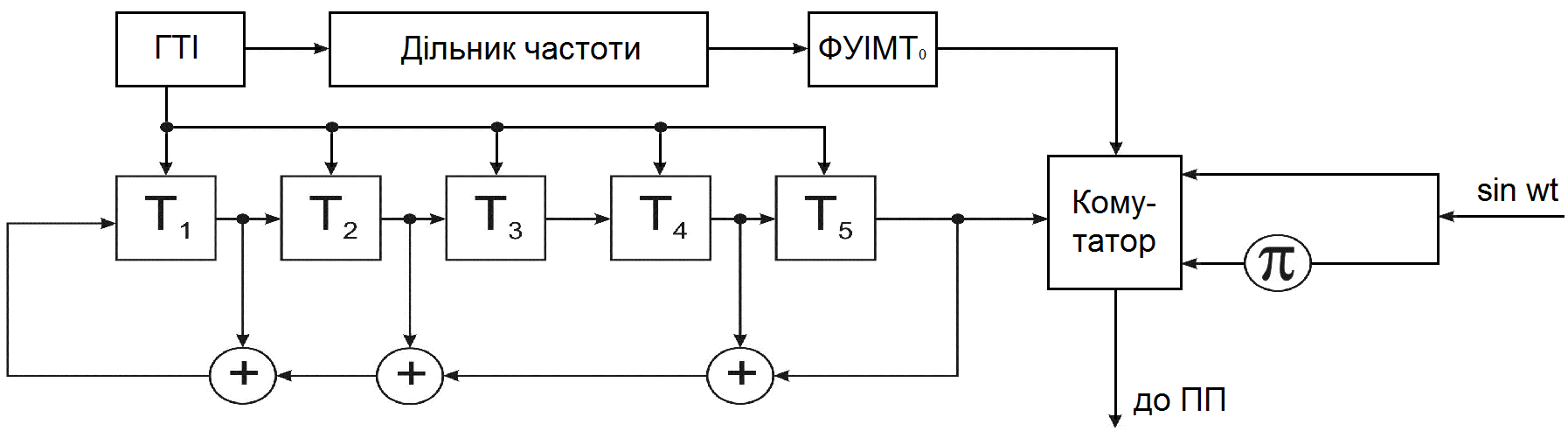
 Рис.
1.4 – Структурна схема
генератора синтезованого ФМ сигналу
Рис.
1.4 – Структурна схема
генератора синтезованого ФМ сигналу
На цій схем:
ГТІ - генератор тактових імпульсів;
ФУІМТ0 –
формувач керуючих імпульсів
тривалістю
 .
.
1.3 Узгоджений фільтр та функція автокореляції
Для отримання автокореляційної функції прийнятої М - послідовності використовують узгоджений фільтр, у якого, за визначенням, імпульсна характеристика є дзеркальним відображенням сигналу.
 (1.13)
(1.13)
Виходячи з вищесказаного побудуємо структурну схему узгодженого фільтру для синтезованого ФМ сигналу (рис. 1.5)
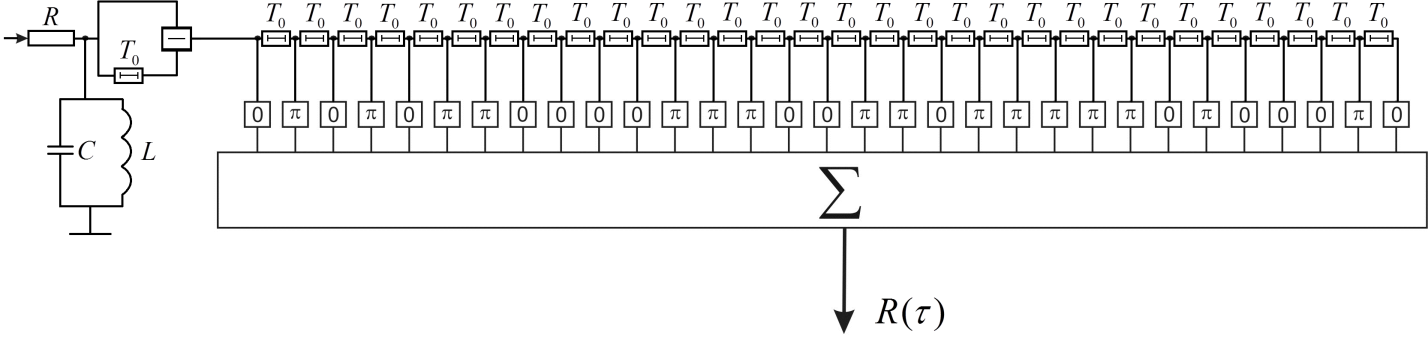
Рис. 1.5 – Структурна схема узгодженого фільтру
 Огинаюча
сигналу на виході узгодженого фільтра
називається функцією автокореляції
Огинаюча
сигналу на виході узгодженого фільтра
називається функцією автокореляції
 зондуючого сигналу. Побудуємо її.
Оскільки вона симетрична, то досить
побудувати лише половину. Для цього
спочатку складемо допоміжну таблицю
(рис. 1.6).
зондуючого сигналу. Побудуємо її.
Оскільки вона симетрична, то досить
побудувати лише половину. Для цього
спочатку складемо допоміжну таблицю
(рис. 1.6).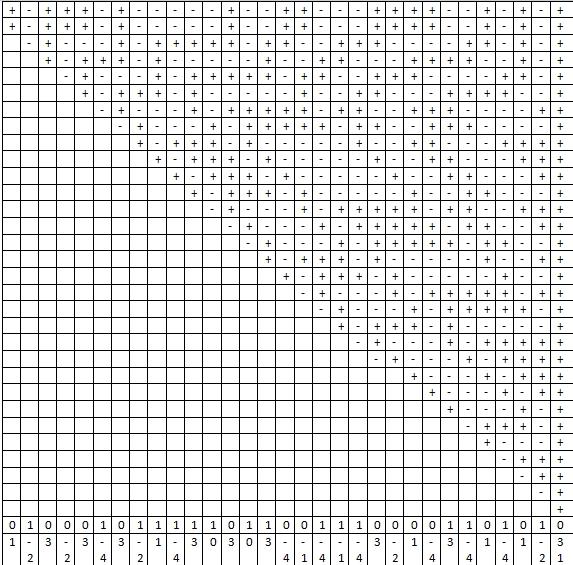
Рис.
1.6 – Допоміжна таблиця
для побудови функції автокореляції

Побудуємо графік
модуля функції автокореляції
 синтезованого ФМ сигналу (рис. 1.7).
синтезованого ФМ сигналу (рис. 1.7).
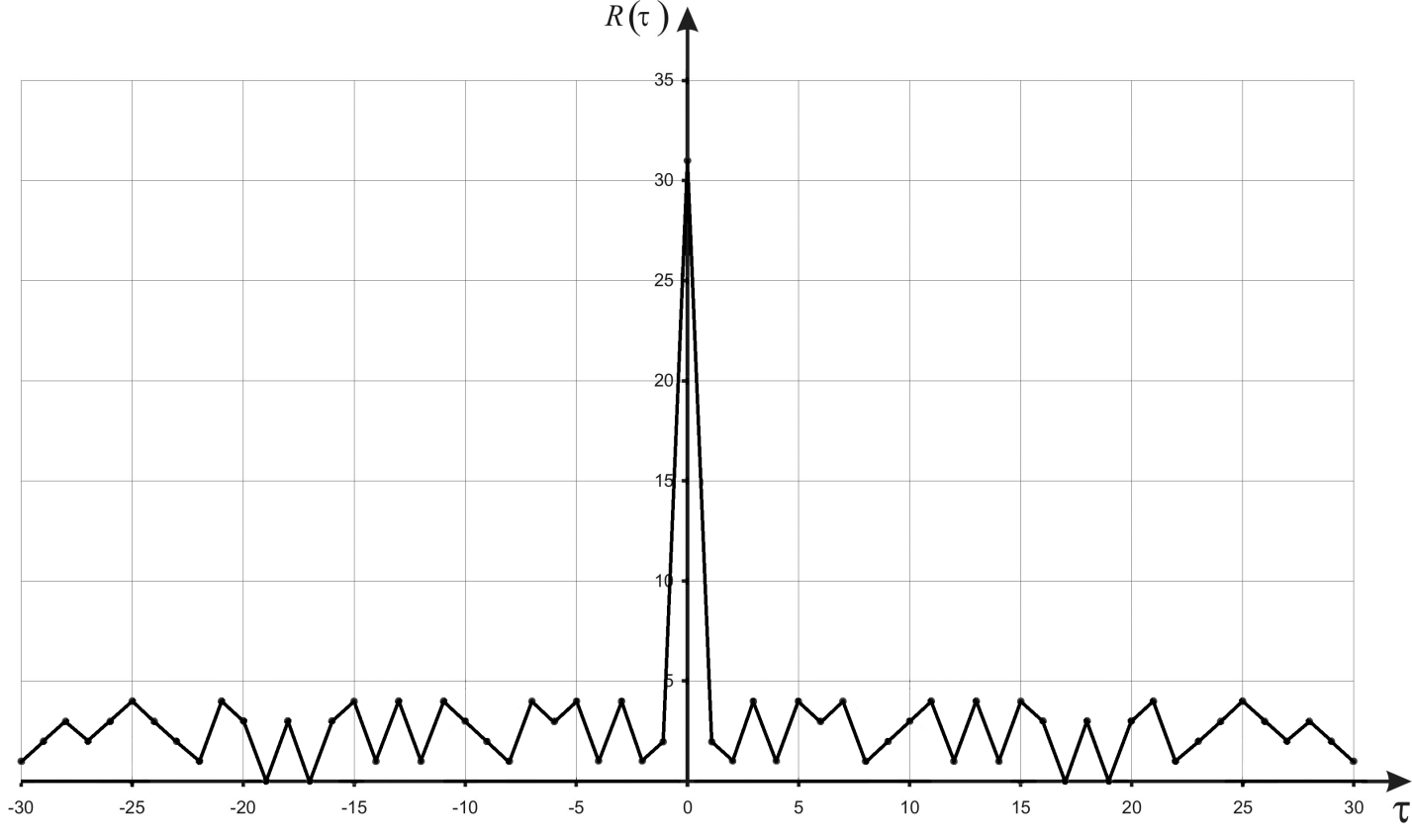
Рис.
1.7 – Графік модуля функції
автокореляції
 синтезованого ФМ сигналу
синтезованого ФМ сигналу
 З
графіка (рис. 1.7) видно, що
є головний максимум та бічні пелюстки.
З рис. 1.7 видно, що
максимальний модуль бічної пелюстки
функції автокореляції
З
графіка (рис. 1.7) видно, що
є головний максимум та бічні пелюстки.
З рис. 1.7 видно, що
максимальний модуль бічної пелюстки
функції автокореляції
 дорівнює 4, тому:
дорівнює 4, тому:
 (1.14)
(1.14)
1.4 Висновок
Сигнал,
який має найменше
 серед усіх інших сигналів, побудованих
за допомогою усіх усічених М-послідовностей
усіх неприводимих первісних поліномів
даного ступеня, зветься мінімаксним, а
процедура пошуку цього сигналу носить
назву оптимізації по мінімаксному
критерію. Синтезований сигнал є
мінімаксним, бо для мінімаксного сигналу
серед усіх інших сигналів, побудованих
за допомогою усіх усічених М-послідовностей
усіх неприводимих первісних поліномів
даного ступеня, зветься мінімаксним, а
процедура пошуку цього сигналу носить
назву оптимізації по мінімаксному
критерію. Синтезований сигнал є
мінімаксним, бо для мінімаксного сигналу
 ,
а в нашому випадку
,
а в нашому випадку
 .
.