

печать / андр 2
.docxМинистерство образования и науки, МОЛОДЁЖИ И СПОРТА украины
ОДЕССКИЙ НАЦИОНАЛЬНЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
институт компьютерных систем
кафедра компьютеризированных систем управления
Автоматизация типовых производственных процессов
Практическая работа №2
«Разработка алгоритмов УВМ для получения координат земснаряда и управления им»
Выполнили:
Cтуденты
группы АТ-092
Задыр И.Г
Калигаева А.А.
Соломянный А.
Орманжи А.
Проверил: Андриевский Г.Г.
Одесса, 2012г.
Цель работы: составить программу вычисления постоянных величин текущих координат, программу вычисления β0 и Δβ, программу проверки правильности полученных координат объекта на i-ом цикле и составить к ним комментарии.
Ход работы
-
Составляем программу вычисления постоянных величин.
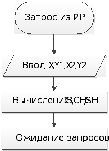
рис.1
При выполнении данной программы вычисления постоянных величин, мы сначала вводим координаты первого, а затем второго отражателей, расположенных на берегу. Затем вычисляется расстояние между этими двумя отражателями. Затем вычисляются постоянные CH и SH по формулам:


-
Составляем программу вычисления текущих координат.
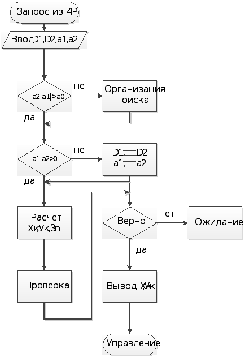
рис.2
Вначале вводятся расстояния от земснаряда до первого отражателя D1, до второго отражателя D2, а также углы между диаметральной плоскостью судна и направлениями на отражатель 1 и 2. Затем вычисляется разность между углами a1 и a2. Если она меньше некоторой постоянной величины a0, то оба лазера поймали один и тот же отражатель. В этом случае происходит поиск другого отражателя. Затем вычисляется разность a1-a2, и если она больше 0, то происходит расчёт текущих координат Xк и Ук по формулам:
Хк = USH – VCH+X1;
Ук = USH – VCH+У1;
Затем программа проверяет правильность полученного результата и в случае правильности, выводит значение текущих координат. В противном случае происходит ожидание новых значений.
-
Составляем программу вычисления β0 и Δβ
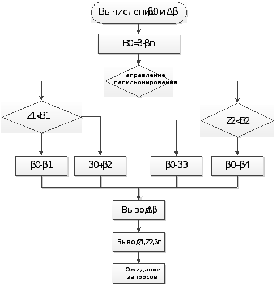
рис.3
Данная программа определяет поправку и ошибку багремейстерского угла. Вначале программы определяется поправка багремейстерского угла β0. Затем программа определяет направление папильонирования. В зависимости от направления папильонирования определяется большее или меньшее расстояние до края бровки Z1(Z2), затем расстояние начала подхода к бровке вырабатываемого канала В1 (В2). Затем в зависимости от результата вычисляется ошибка багермейстерского угла Δβ по формуле:
Δβ = β0 – βi (i=1,4)
и поправка багремейстерского угла β0:
β0 = β – βn
-
Составляем программу проверки правильности полученных координат объекта на i-ом цикле.
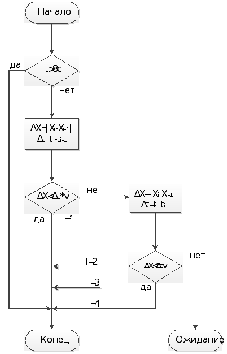
рис.4
Выводы: в ходе выполнения работы мы составили четыре алгоритма для вычисления постоянных величин текущих координат, алгоритм вычисления β0 и Δβ, алгоритм проверки правильности полученных координат объекта на i-ом цикле и составили комментарии к ним.