

печать / Андр 3
.docxМинистерство образования и науки, МОЛОДЁЖИ И СПОРТА украины
ОДЕССКИЙ НАЦИОНАЛЬНЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
институт компьютерных систем
кафедра компьютеризированных систем управления
Автоматизация типовых производственных процессов
Практическая работа №3
«Автоматизированная лазерная система ориентации и управления движением дноуглубительного судна»
Выполнили:
Ст группы АТ-092
Задыр И.Г
Калигаева А.А.
Соломянный А.
Орманжи А.
Проверил: Андриевский Г.Г.
Одесса
2013г.
Цель работы:
-
Изучить представленную информацию.
-
Составить общую блок-схему автоматизированного управления земснарядом при применении лазерной системы ориентации и привести комментарии к схеме.
-
Составить программу управления.
Ход работы:
Автоматизированная лазерная система (АЛС) должна обеспечить определение линейного углового положения земснаряда на канале и получение информации в форме необходимой для наблюдения и использования в целях управления для чего необходимо выполнение следующих функций:
-
В соответствии с выбранным методом ориентации измерения двух расстояний от земснаряда до двух опорных точек, для определения расположения земснаряда на участке.
-
Измерение углов направлений на опорные точки для определения углового положения земснаряда.
-
Вычисление положения земснаряда относительно канала.
-
Вывод информации для индикации и управления
-
Управление приводами лебедок.
-
Включение кормовых, носовых, винтовых лебедок.
-
Регулирование скорости подачи в зависимости от ошибки багермейстерского угла.
-
Обеспечение ненормативных режимов работы.
Программа управления предусматривает ввод задаваемых значений параметров технологического процесса, вычисление технологических параметров и управление технологическими операциями. Задаваемые значения для каждого направления папильонирования:
-
Расстояние до бровок от оси канала А1 и А2ю
-
Расстояние начала подхода к бровкам вырабатываемой прорези В1 и В2.
-
Расстояние до бровок вырабатываемой прорези при выключении носовых лебедок С1 и С2.
-
Расстояние до бровок при вырабатываемой прорези и линии замедления кормовых лебедок Е1 и Е2.
-
Багермейстерские углы β1 и β2.
-
Углы подхода к бровкам вырабатываемой прорези β3 и β4.
-
Поправка багремейстерского угла β0
Программа определяет:
-
Расстояние до каждой из вырабатываемых бровок Z1 и Z2.
-
Значение багремейстерского угла с учетом поправки
-
Ошибка багремейстерского угла Δβ=β0-β3 (или Δβ=β0-β4).
-
Переключение режимов работы
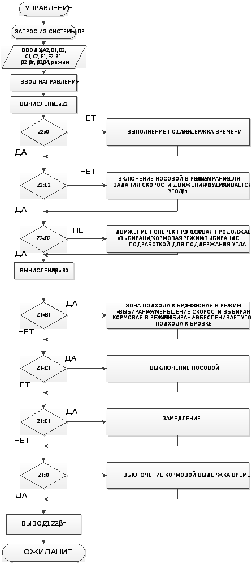
Определив исходные параметры и выполняемые функции, можно построить схему управления (рис.1), а также блок-схему алгоритма управления на примере движения земснаряда вправо(рис.2).
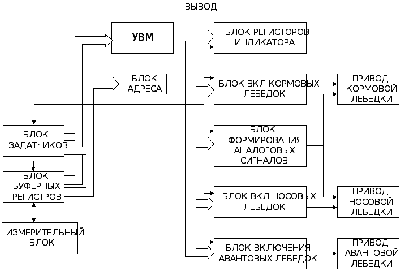
Рис.1 Схема автоматизированного управления
САУ можно разделить на 3 части: управляющий вычислительный комплекс (УВК), задающая подсистема и исполнительные механизмы.
УВК позволяет обрабатывать информацию для определения координат судна в реальном масштабе времени и осуществлять управление движением судна. Вместе с задающей подсистемой УВК включают в себя: пульт управления оператора процесса с блоком управления, устройство обмена информацией, блоком задатчиков, блоком адресов, блок индикации и управляющую вычислительную машину с программно-математическим обеспечением.
К исполнительным механизмам (ИМ) относятся блоки включения лебедок (носовых, кормовых и авантовых), а также приводов. ИМ служат для осуществления взаимодействия на технологический объект управления по сигналу от системы управления.
Рассмотрим основные блоки детальней.
Блок задатчиков – задание оператором постоянных величин необходим для правильной работы системы. Задается только один раз перед началом работы.
Измерительный блок выполняет измерение расстояний от текущего положения судна до двух ориентиров и углов и, после преобразования сохраняет результат в блоке буферных регистров.
Буферное устройство состоит из схем управления регистрами, регистров угла и регистра расстояний. Блок предназначен для приема информации о расстоянии и угла из измерительного блока последовательным кодом и вывода информации в магистраль ввода УВМ параллельным кодом для вычисления координат управляемого объекта.
С описанными выше блоками, УВМ связана магистралями ввода и управления. Для обеспечения приема команды управления или посылки информации блоками по установленному алгоритму порядку в САУ введен блок адреса, который получает от УВМ адрес блока, к которому будет обращение, и запрещает остальным блокам его принимать, блок индикации служит для связи между оператором и процессом управления.
Блоки включения носовых, кормовых и авантовых лебедок осуществляет управление приводами лебедок.
Блок формирователя аналоговых сигналов формирует скорость кормовых и носовых лебедок при движении объекта к бровкам.
Таким образом, схему автоматизированного управления можно описать следующим образом:
-
В начале происходит обращение к блоку задатчиков и вычисление постоянных.
-
Вторым этапом является обращение к буферному устройству (в котором уже находятся значения углов и расстояний, полученные от блока измерения) и вычисление текущих координат.
-
На третьем этапе происходит изменение режима и управление объектом.
Второй и третий этапы повторяются до вмешательства оператора в процесс или возникновения ситуации, требующей его вмешательства.
Для выполнения рассмотренных основных операций автоматизированная система управления обеспечивает следующую последовательность включения и необходимый порядок работы механизмов в автоматическом режиме землечерпакового судна при проведении дноуглубительных работ:
-
Движение вправо (отход от бровки).
Правая передняя лебедка в режиме «выбирание» (задает движение судна вправо перпендикулярно оси канала), учитывается нагрузка ВЧБ, увеличивается угол папильонирования. Остальные папильонажные лебедки в режиме «тормодение». Авантовая лебедка в режиме «стоп».
-
При достижении угла папильнирования:
Правая передняя - «выбирание» с обеспечением заданной скорости папильонирования.
Правая задняя – «выбирание» с обеспечением заданного угла папильонирования, (подработка: в зависимости от знака ошибки багермейстерского угла Δβ уменьшается или увеличивается скорость отработки ошибки угла папильнирования).
-
При достижении зоны подхода к бровке (линии изменения угла папильнирования).
Правая передняя продолжает «выбирание», уменьшение скорости для обеспечения заданной скорости подхода к брвке.
Правая задняя в режиме «выбирание», уменьшение скорости для обеспечения заданной скорости подхода к бровке.
Левая передняя и задняя - в режиме «торможение».
Авантовая -в режиме стоп.
-
При достижении угла папильонирования в хоне подхода к бровке. Правая задняя в режиме «выбирание» с обеспечением ошибки багермейстерского угла Δβ при подходе к бровке. Левые задняя и передняя в режиме «торможение». Авантовая в режиме «стоп».
-
При достижении правой бровки. Правая задняя – выключение. Все папильонажные лебедки в режиме «торможение». Авантовая в режиме «стоп». Выдержка времени.
-
Авант (подача вперед).
Авантовая лебедка в режиме «выбирание» на заданную величину подачи. (задается скорость и время выборки). Все папильонажные лебедки в режим «торможения».
После подачи – выдержка времени.
-
Отход от бровки (движение влево). Левая передняя лебедка в режим «выбирание», обеспечивает заданную скорость папильонирования, увеличивается угол папильонирования. Остальные папильонажные лебедки в режим «торможение». Авантовая – в режим «стоп». Далее аналогично движению вправо.
Перечень параметров, задаваемых с пульта управления в автоматическом режиме:
-
Угол папильонирования при движении в средней части сечения прорези.
-
Угол папильонирования при подходе к бровке.
-
Расстояние от бровки до линии(точки), где нужно менять угол папильонирования.
-
Время паузы от момента достижения бровки до начала авантового движения.
-
Время паузы после авантового движения.
-
Время подработки с заданной скоростью, т.е. расстояние, проходимое судном при авантовом движении (Авант – величина подачи)
-
Коэффициент связи – скорость папильонирования - загрузка ВЧБ (влияние нагрузки ВЧБ).
-
Скорость папильонирования в средней части канала (скорость папильонирования).
-
Скорость папильонирования (точка замедления).
-
Скорость обработки ошибки угла папильонирования (скорость исправления багермейстерского угла).
Вывод:
В ходе выполнения лабораторной работы была изучена автоматизированая лазерная система ориентации и управления движения дноуглубительного судна. Была разработана структурная схема система, а так же блок-схема управления.