Термінальне управління
Т ермінологія
: Термінальне управління УКС
(управління кінцевим станом).
ермінологія
: Термінальне управління УКС
(управління кінцевим станом).
За останні 30-50 років з’явились нові об’єкти управління і новий клас ззадач управління:
стикування космічних кораблів(стабілізація висоти польоту);
причалювання танкера;
посадка літака на палубу;
польот літаків шеренгою;
В якості приклада сучасних масових виробничих об’єктів можна розглядати роботів-маніпуляторів: від „одноруких” до „шестируких”, від мікроманіпуляторів про роботі з клітинами та вірусами до кувальних маніпуляторів, працюючих з багатотонними заготівками.
Існують і інші області, де виникають задачі управління кінцевим станом – мталургія, хім. виробництво, економіка, але там ці задачі не меньш наглядні.
Задачі термінального управління – одне з джерел варіаційного числення, яке традиційно вважається незбагненним для більшості смертних і дається тільки в університетах.
В певному сенсі (якщо подивитись в літературу з робототехніки) поки не існує простих методів термінального управління з зворотнім зв’язком.
Розглянимо один з можливих підходів до побудови простих систем термінального управління. Основа данного підходу – управління по вищій похідній.
Історія виникнення та застосування управління по вищій похідній достатньо драматична.
Метод розроблений та застосовується в реальних системах в СРСР. Монографія по цьому методу не була опублікована, оскільки його „недоліком” була простота (як вважали респонденти). Потім цей метод був запатентований в CША (Сміт, Метклаф) і застосований в системі управління вертикально злітаючим літаком „Харіер” в Англії, тоді і була вперше опублікована книга А.П.Батенко „Управление конечнім состоянием объектов” у нас.
Класифікація задач термінального управління
Розглянемо класифікацію на прикладі простої задачі управління рухом матеріальоної точки по прямій. Звичайно, класифікація застосовується і для будь-яких багатомірних задач.
Нам потрібно об’єкт з т.А в т.В

T- час переходу
Задача розгону
|
Умовно зображається: ! |
|

Через час T потрібно отримати необхідну швидкість. Якщо T фіксується, то задача розгону замкнена, якщо T не фіксована, то – розімкнена
Задача приведенння
Контролюється тільки координата.
Задача зближення
Зафіксували Sk,Vk.
Задача м’якого зближення
|
Uk - прискорення.
|
|
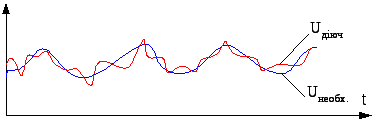
5. Задача супроводження
|
Кінцеві координати змінюються по якомусь закону. (Приклад: робот закручує гайку на авто |
|
|
мобілі, який рухається по конвейєру, тобто робот супроводжує автомобілі) | |

Задача зустрічі
|
Приклад : дворукий робот (рух рук); зближення космічних кораблів, коли обидва активні. |
|

Постановка задачі термінального управління
Будемо розглядати одномірну задачу.
1) Рівняння динаміки об’єкта (рух об’єкта уздовж вісі s) розглянемо в вигляді:

(порівняйте
з законом Н’ютона:
![]() )
деm
– маса
об’єкта;
)
деm
– маса
об’єкта;
![]() - Сума
проекцій на вісь S
керованих сил, визваних взаємодією керуючих
органів з зовнішнім середовищем і тягою
двигунного пристрою;
- Сума
проекцій на вісь S
керованих сил, визваних взаємодією керуючих
органів з зовнішнім середовищем і тягою
двигунного пристрою;
![]() - Сума
проекцій на вісь S
некерованих сил, визваних дією зовнішнього
середовища.
- Сума
проекцій на вісь S
некерованих сил, визваних дією зовнішнього
середовища.
2) Припустимо, що виконується необхідна умова керованості:
![]()
![]()
 ,
для
усіх
,
для
усіх
![]()
3)
В
якості управляючого впливу вибираємо
вищу
похідну.
В данному випадку
![]()
![]() -
прискорення. В цьому і полягає основна
суть запатентованого методу управління
по вищій похідній.
-
прискорення. В цьому і полягає основна
суть запатентованого методу управління
по вищій похідній.
4)
Управління
шукаємо в вигляді полінома від
![]()
![]()

наприклад,
для
![]()
![]() ,
,
де
![]() -
необхідне управління,
-
необхідне управління,
![]() -
кількість граничних умов,
-
кількість граничних умов,
![]() -
шукомий коефіцієнт.
-
шукомий коефіцієнт.
Кількість
доданків в
![]() беремо
рівною кількості граничних умов для
того, щоб отримати єдиний розв’язок.
беремо
рівною кількості граничних умов для
того, щоб отримати єдиний розв’язок.
Пропустимо, що управляючий вплив – прискорення створюється за допомогою достатньо точної і швидкодіючої слідкуючої системи так, що
![]()
|
|
Щоб виконувалась рівність, необхідно, щоб система була слідкуючою. |