Calc_Work / CW_Pzis
.doc
НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ХАРЧОВИХ ТЕХНОЛОГІЙ
Кафедра інформаційних систем
Розрахункова робота
з дисципліни
ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ ІНТЕЛЕКТУАЛЬНИХ СИСТЕМ
Тема
Пошук оптимального шляху на графі станів
Виконав:
студент групи АКС4-5
Теслович І.Ю.
Перевірила:
Гаркуша І.Д.
Київ 2012
Розрахункова робота
з дисципліні
ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ ІНТЕЛЕКТУАЛЬНИХ СИСТЕМ
|
Тема : |
Пошук на шляху найменшої ваги на зваженому графі станів |
|
|
|
|
Мета : |
Практичне ознайомлення з методом пошуку оптимального шляху на графі станів |
|
|
|
|
План роботи : |
|
|||
|
Побудувати, відпрацювати та ознайомитись з роботою методів і відповідних програм пошуку на графах стану.
|
||||
До звіту включити:
-
Завдання
-
Зображення графів з нанесеними на них рішеннями;
-
Схему послідовності розв'язку задачі.
-
Тексти програм;
-
Висновки
Схема зваженого графу
Схема графу

 C
C
 А
B D E
А
B D E






 G
H
F
G
H
F




 M
M

 K
L
N
K
L
N
O
База даних зваженого графа.
vet_("a","b",2). vet_("a","g",2).vet_("g","k",1).vet_("g","l",4).vet_("k","l",3).
vet_("g","b",6).vet_("b","d",3).vet_("c","d",3). vet_("d","f",2). vet_("c","e",4).
vet_("e","f",1).vet_("h","l",2).vet_("h","f",3).vet_("h","m",5).vet_("m","n",3).
vet_("m","o",4). vet_("n","o",2).
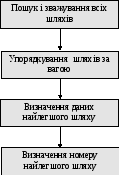
Послідовність розв'язку задачі
Текст програми
/*****************************************************************************
Purpose: Пошук на графі стану шляху з найменшою вагою
******************************************************************************/
% Пошук у глибину з начисленням ваги i min.
DOMAINS
UZ=STRING
LISTS=STRING*
RLIST=REAL*
DAT=dat(INTEGER Nmb,REAL Vaga)
DATL=DAT*
DATABASE-graf
vet_(UZ,UZ,REAL G)
start(UZ)
finish(UZ)
DATABASE-cur
determ cl(INTEGER)
DATABASE-res
path(INTEGER Nmb,LISTS Path,REAL Vaga)
PREDICATES
nondeterm solS(STRING,STRING,LISTS,REAL G)
nondeterm glS(LISTS,STRING,STRING,LISTS,REAL Gc,REAL G)
nondeterm member(STRING,LISTS).
nondeterm mgS(STRING,STRING,REAL DG)
nondeterm oneSol(DAT)
doSol
%-------
quicksort(DATL,DATL)
CLAUSES
member(X,[X|_]).
member(X,[_|_L]):-member(X,_L).
%------------------------------------
mgS(X,Y,D):-
vet_(X,Y,D).
mgS(X,Y,D):-
vet_(Y,X,D).
%....................................
solS(X,Y,L,G):-
glS([],X,Y,L,0.0,G).%,
%------------------------------------------------
glS(S1,Xt,Xt,[Xt|S1],G,G):-!.
glS(S1,Xt,Y,S,Gcur,G):-
mgS(Xt,Z,DG),
Gcur1=Gcur+DG,
not(member(Z,S1)),
glS([Xt|S1],Z,Y,S,Gcur1,G).
%-------------------------------------------------
oneSol(DAT):-
start(ST),
finish(FIN),
solS(ST,FIN,L,G),
cl(C),
C1=C+1,
assert(path(C1,L,G),res),
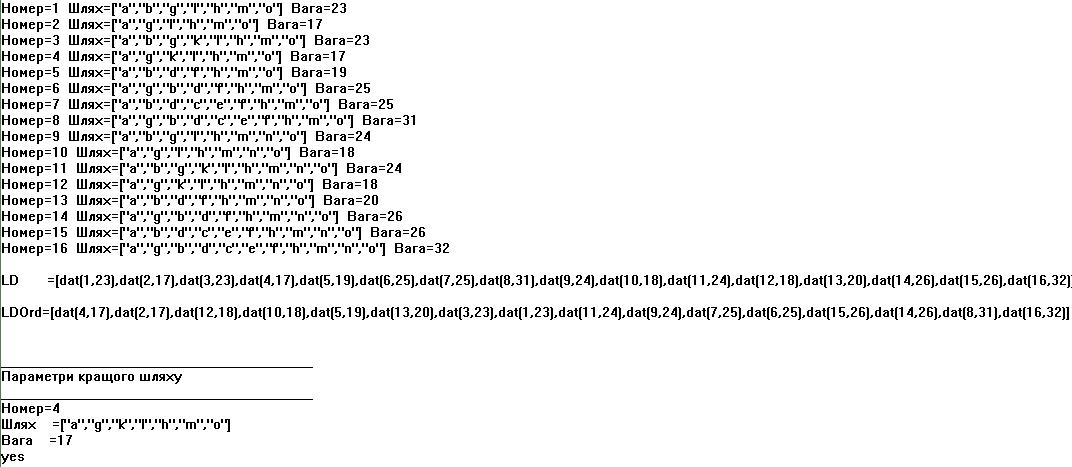
write("Номер=",C1," Шлях=",L," Вага=",G),nl,
DAT=dat(C1,G),
retractall(cl(_),cur),
assert(cl(C1),cur).
%-------------------------------------------------
% Сортування списків
PREDICATES
nondeterm partishion(DATL,DAT,DATL,DATL).
append(RLIST,RLIST,RLIST)
append(DATL,DATL,DATL)
CLAUSES
quicksort([X|Xs],Ys):-
partishion(Xs,X,Littles,Bigs),
quicksort(Littles,Ls),
quicksort(Bigs,Bs),
append(Ls,[X|Bs],Ys),!.
quicksort([],[]).
partishion([X|Xs],Y,[X|Ls],Bs):- %X<=Y,partishion(Xs,Y,Ls,Bs),
X=dat(_Nx,Gx),
Y=dat(_Ny,Gy),
Gx<=Gy,
partishion(Xs,Y,Ls,Bs).
partishion([X|Xs],Y,Ls,[X|Bs]):- %X>Y ,partishion(Xs,Y,Ls,Bs),
X=dat(_Nx,Gx),
Y=dat(_Ny,Gy),
Gx>Gy,
partishion(Xs,Y,Ls,Bs).
partishion([],_,[],[]).
append([],Ys,Ys).
append([X|Xs],Ys,[X|Zs]):-append(Xs,Ys,Zs).
%#############################################
%-------------------------------------------------
doSol:-
assert(cl(0),cur),
findall(D,oneSol(D),LD), %Пошук і зважування всіх шляхів
nl,write("LD =",LD),nl,
quicksort(LD,LDOrd), %Упорядкування шляхів за вагою
nl,write("LDOrd=",LDOrd),nl,
LDOrd=[MIN|_LDOrd1], %Визначення даних найлегшого шляху
MIN=dat(NMin,_), %Визначення номеру найлегшого шляху
path(NMin,L,G),!,
nl,nl,
write("_______________________________________"),nl,
write("Параметри кращого шляху"),nl,
write("_______________________________________"),nl,
write("Номер=",NMin),nl,
write("Шлях =",L),nl,
write("Вага =",G),nl.
%-------------------------------- ГРАФ ---------------------------------------
vet_("a","b",2). vet_("a","g",2).vet_("g","k",1).vet_("g","l",4).vet_("k","l",3).
vet_("g","b",6).vet_("b","d",3).vet_("c","d",3). vet_("d","f",2). vet_("c","e",4).
vet_("e","f",1).vet_("h","l",2).vet_("h","f",3).vet_("h","m",5).vet_("m","n",3).
vet_("m","o",4). vet_("n","o",2).
start("o").
finish("a").
%####################################
GOAL doSol.