

ГОСЫ / Bilety
.pdfОС Windows Шаров
4. Планирование потоков. Сценарии планирования. Кванты. Планирование процессов и потоков
Подсистема управления процессами и потоками занимается их созданием и уничтожением, поддерживает взаимодействие между ними, а также распределяет процессорное время между несколькими одновременно существующими в системе процессами и потоками. Процесс (или подругому, задача) - абстракция, описывающая выполняющуюся программу. Для операционной системы процесс представляет собой единицу работы, заявку на потребление системных ресурсов.
Подсистема управления процессами и потоками ответственна за обеспечение процессов необходимыми ресурсами. ОС поддерживает в памяти специальные информационные структуры, в которые записывает, какие ресурсы выделены каждому процессу. Она может назначить процессу ресурсы в единоличное пользование или в совместное пользование с другими процессами. Некоторые из ресурсов выделяются процессу при его создании, а некоторые — динамически по запросам во время выполнения. Ресурсы могут быть приписаны процессу на все время его жизни или только на определенный период. При выполнении этих функций подсистема управления процессами взаимодействует с другими подсистемами ОС, ответственными за управление ресурсами, такими как подсистема управления памятью, подсистема ввода-вывода, файловая система.
Когда в системе одновременно выполняется несколько независимых задач, то возникают дополнительные проблемы. Хотя потоки возникают и выполняются асинхронно, у них может возникнуть необходимость во взаимодействии, например при обмене данными. Согласование скоростей потоков также очень важно для предотвращения эффекта «гонок» (когда несколько потоков пытаются изменить один и тот же файл), взаимных блокировок или других коллизий, которые возникают при совместном использовании ресурсов. Синхронизация потоков является одной из важных функций подсистемы управления процессами и потоками.
Каждый раз, когда процесс завершается, ОС предпринимает шаги, чтобы «зачистить следы» его пребывания в системе. Подсистема управления процессами закрывает все файлы, с которыми работал процесс, освобождает области оперативной памяти, отведенные под коды, данные и системные информационные структуры процесса. Выполняется коррекция всевозможных очередей ОС и списков ресурсов, в которых имелись ссылки на завершаемый процесс.
Алгоритмы планирования, основанные на квантовании
В основе многих вытесняющих алгоритмов планирования лежит концепция квантования. В соответствии с этой концепцией каждому потоку поочередно для выполнения предоставляется ограниченный непрерывный период процессорного времени — квант. Смена активного потока происходит, если:
поток завершился и покинул систему; произошла ошибка; поток перешел в состояние ожидания;
исчерпан квант процессорного времени, отведенный данному потоку.
Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый поток из очереди готовых. Граф состояний потока, изображенный на рис. 4.6, соответствует алгоритму планирования, основанному на квантовании.
Рис. 4.6. Граф состояний потока в системе с квантованием
Кванты, выделяемые потокам, могут быть одинаковыми для всех потоков или различными. Рассмотрим, например, случай, когда всем
1

потокам предоставляются кванты одинаковой длины q (рис. 4.7). Если в системе имеется п потоков, то время, которое поток проводит в ожидании следующего кванта, можно грубо оценить как q(n-l). Чем больше потоков в системе, тем больше время ожидания, тем меньше возможности вести одновременную интерактивную работу нескольким пользователям. Но если величина кванта выбрана очень небольшой, то значение произведения q(n-l) все равно будет достаточно мало для того, чтобы пользователь не ощущал дискомфорта от присутствия в системе других пользователей. Типичное значение кванта в системах разделения времени составляет десятки миллисекунд.
Рис. 4.7. Иллюстрация расчета времени ожидания в очереди
Если квант короткий, то суммарное время, которое проводит поток в ожидании процессора, прямо пропорционально времени, требуемому для его выполнения (то есть времени, которое потребовалось бы для выполнения этого потока при монопольном использовании вычислительной
системы). Действительно, поскольку время ожидания между двумя циклами выполнения равно q(n-l), а количество циклов B/q, где В — требуемое время выполнения, то W*B(n-l). Заметим, что эти соотношения представляют собой весьма грубые оценки, основанные на предположении, что В значительно превышает q. При этом не учитывается, что потоки могут использовать кванты не полностью, что часть времени они могут тратить на ввод-вывод, что количество потоков в системе может динамически меняться и т. д.
Чем больше квант, тем выше вероятность того, что потоки завершатся в результате первого же цикла выполнения, и тем менее явной становится зависимость времени ожидания потоков от их времени выполнения. При достаточно большом кванте алгоритм квантования вырождается в алгоритм последовательной обработки, присущий однопрограммным системам, при котором время ожидания задачи в очереди вообще никак не зависит от ее длительности.
Кванты, выделяемые одному потоку, могут быть фиксированной величины, а могут и изменяться в разные периоды жизни потока. Пусть, например, первоначально каждому потоку назначается достаточно большой квант, а величина каждого следующего кванта уменьшается до некоторой заранее заданной величины. В таком случае преимущество получают короткие задачи, которые успевают выполняться в течение первого кванта, а длительные вычисления будут проводиться в фоновом режиме. Можно представить себе алгоритм планирования, в котором каждый следующий квант, выделяемый определенному потоку, больше предыдущего. Такой подход позволяет уменьшить накладные расходы на переключение задач в том случае, когда сразу несколько задач выполняют длительные вычисления.
Потоки получают для выполнения квант времени, но некоторые из них используют его не полностью, например из-за необходимости выполнить ввод или вывод данных. В результате возникает ситуация, когда потоки с интенсивными обращениями к вводу-выводу используют только небольшую часть выделенного им процессорного времени. Алгоритм планирования может исправить эту «несправедливость». В качестве компенсации за неиспользованные полностью кванты потоки получают привилегии при последующем обслуживании. Для этого планировщик создает две очереди готовых потоков (рис. 4.8). Очередь 1 образована потоками, которые пришли в состояние готовности в результате исчерпания кванта времени, а очередь 2
— потоками, у которых завершилась операция ввода-вывода. При выборе потока для выполнения прежде всего просматривается вторая очередь, и только если она пуста, квант выделяется потоку из
первой очереди.
2

Многозадачные ОС теряют некоторое количество процессорного времени для выполнения вспомогательных работ во время переключения контекстов задач. При этом запоминаются и восстанавливаются регистры, флаги и указатели стека, а также проверяется статус задач для передачи управления. Затраты на эти вспомогательные действия не зависят от величины кванта времени, поэтому чем больше квант, тем меньше суммарные накладные расходы, связанные с переключением потоков. Рис. 4.8. Квантование с предпочтением потоков, интенсивно обращающихся к вводу-выводу
ПРИМЕЧАНИЕ
В алгоритмах, основанных на квантовании, какую бы цель они не преследовали (предпочтение коротких или длинных задач, компенсация недоиспользованного кванта или минимизация накладных расходов, связанных с переключениями), не используется никакой предварительной информации о задачах. При поступлении задачи на обработку ОС не имеет никаких сведений о том, является ли она короткой или длинной, насколько интенсивными будут ее запросы к устройствам ввода-вывода, насколько важно ее быстрое выполнение и т. д.
Вытесняющие и невытесняющие алгоритмы планирования
С самых общих позиций все множество алгоритмов планирования можно разделить на два класса: вытесняющие и невытесняющие алгоритмы планирования.
Невытесняющие (non-preemptive) алгоритмы основаны на том, что активному потоку позволяется выполняться, пока он сам, по собственной инициативе, не отдаст управление операционной системе для того, чтобы та выбрала из очереди другой готовый к выполнению поток.
Вытесняющие (preemptive) алгоритмы — это такие способы планирования потоков, в которых решение о переключении процессора с выполнения одного потока на выполнение другого потока принимается операционной системой, а не активной задачей.
В состоянии выполнения в однопроцессорной системе может находиться не более одного потока, а в каждом из состояний ожидания и готовности — несколько потоков. Эти потоки образуют очереди соответственно ожидающих и готовых потоков. Очереди потоков организуются путем объединения в списки описателей отдельных потоков. Таким образом, каждый описатель потока, кроме всего прочего, содержит по крайней мере один указатель на другой описатель, соседствующий с ним в очереди. Такая организация очередей позволяет легко их переупорядочивать, включать и исключать потоки, переводить потоки из одного состояния в другое. Если предположить, что на рис. 4.4 показана очередь готовых потоков, то запланированный порядок выполнения выглядит так: А, В, Е, D, С.
Рис. 4.4. Очередь потоков
Другой важной концепцией, лежащей в основе многих вытесняющих алгоритмов планирования, является приоритетное обслуживание. Приоритетное обслуживание предполагает
наличие у потоков некоторой изначально известной характеристики — приоритета, на основании которой определяется порядок их выполнения. Приоритет — это число, характеризующее степень привилегированности потока при использовании ресурсов вычислительной машины, в частности процессорного времени: чем выше приоритет, тем выше привилегии, тем меньше времени будет проводить поток в очередях.
3

8.Подсистема ввода-вывдоа. Компоненты и их роль.
Архитектура Windows NT имеет модульную структуру и состоит из двух основных уровней — компоненты, работающие в режиме пользователя и компоненты режима ядра. Программы и подсистемы, работающие в режиме пользователя имеют ограничения на доступ к системным ресурсам. Режим ядра имеет неограниченный доступ к системной памяти и внешним устройствам. Ядро системы NT называют гибридным ядром или макроядром. Архитектура включает в себя само ядро, уровень аппаратных абстракций (HAL), драйверы и ряд служб (Executives), которые работают в режиме ядра (Kernel-mode drivers) или в пользовательском режиме (User-mode drivers)[1][2].
Пользовательский режим Windows NT состоит из подсистем, передающих запросы ввода-вывода соответствующему драйверу режима ядра посредством менеджера ввода-вывода. Есть две подсистемы на уровне пользователя: подсистема окружения (запускает приложения, написанные для разных операционных систем) и интегрированная подсистема (управляет особыми системными функциями от имени подсистемы окружения). Режим ядра имеет полный доступ к аппаратной части и системным ресурсам компьютера. И также предотвращает доступ к критическим зонам системы со стороны пользовательских служб и приложений.
Подсистема ввода-вывода отвечает за обработку запросов ввода-вывода и проектировалась для выполнения перечисленных далее задач.
Обеспечение работы сверхпроизводительных операций ответного ввода-вывода для одно- и многопроцессорных компьютеров.
Предоставление асинхронного ввода-вывода. Синхронный ввод-вывод осуществляется, по сути, в виде асинхронного запроса ввода-вывода, после которого следует блокирующее ожидание завершения операции ввода-вывода.
Поддержка нескольких файловых систем, в частности CDFS, NTFS HUDFS. Предоставление модульной архитектуры, поддерживающей добавление новых файловых систем и устройств.
Предоставление устройствам (и их драйверам) возможности подключения и отключения "на лету", без йерезагрузки (эта функция реализована в Windows 2000 и более новых версиях Windows NT). Предоставление расширенных возможностей, например кэширования и записи содержимого файлов в память (запись содержимого файла в указанной области памяти в адресном пространстве процесса). Для получения доступа или модификации содержимого файла приложение выполняет чтение и запись определенной области адресного пространства.
Защита ресурсов, которые совместно используются несколькими процессами.
Подсистема ввода-вывода имеет модульную структуру (как и все остальные компоненты Windows NT) и состоит из следующих компонентов:
программный интерфейс приложений ввода-вывода (I/O API);
диспетчер ввода-вывода;
драйверы файловых систем;
другие драйверы (например, драйверы клавиатуры и драйверы дисков). Далее эти модули рассматриваются более подробно.
Согласно целям, поставленным при разработке, подсистема обеспечивать приложениям абстракцию устройств — как программных (виртуальных или логических) — и при функциональность:
ввода-вывода в Windows должна аппаратных (физических), так и этом предоставлять следующую
4
•стандартные средства безопасности и именования устройств для защиты разделяемых ресурсов (описание модели защиты см. в главе 8);
•высокопроизводительный асинхронный пакетный ввод-вывод для поддержки масштабируемых приложений;
•сервисы для написания драйверов устройств на высокоуровневом языке и упрощения их переноса между разными аппаратными платформами;
•поддержку многоуровневой модели и расширяемости для добавления драйверов, модифицирующих поведение других драйверов или устройств без внесения изменений в них;
•динамическую загрузку и выгрузку драйверов устройств, чтобы драйверы можно было загружать по требованию и не расходовать системные ресурсы без необходимости;
•поддержку Plug and Play, благодаря которой система находит и устанавливает драйверы для нового оборудования, а затем выделяет им нужные аппаратные ресурсы;
•управление электропитанием, чтобы система и отдельные устройства могли переходить в состояния с низким энергопотреблением;
•поддержку множества устанавливаемых файловых систем, в том числе FAT, CDFS (файловую систему CD-ROM), UDF (Universal Disk Format) и NTFS (подробнее о типах и архитектуре файловых систем см. в главе 12).
•поддержку Windows Management Instrumentation (WMI) и средств диагностики, позволяющую управлять драйверами и вести мониторинг за ними через WMI-приложения и сценарии. (Описание WMI см. в главе 4.)
Для реализации этой функциональности подсистема ввода-вывода в Windows состоит из нескольких компонентов исполнительной системы и драйверов устройств (рис. 9–1).
•Центральное место в этой подсистеме занимает диспетчер ввода-вывода; он подключает приложения и системные компоненты к виртуальным, логическим и физическим устройствам, а также определяет инфраструктуру, поддерживающую драйверы устройств.
•Драйвер устройства, как правило, предоставляет интерфейс ввода-вывода для устройств конкретного типа. Такие драйверы принимают от диспетчера ввода-вывода команды, предназначенные управляемым ими устройствам, и уведомляют диспетчер ввода-вывода о выполнении этих команд. Драйверы часто используют этот диспетчер для пересылки команд вводавывода другим драйверам, задействованным в реализации интерфейса того же устройства и участвующим в управлении им.
•Диспетчер PnP работает в тесном взаимодействии с диспетчером ввода-вывода и драйвером шины (bus driver) — одной из разновидностей драйверов устройств. Он управляет выделением аппаратных ресурсов, а также распознает устройства и реагирует на их подключение или отключение. Диспетчер PnP и драйверы шины отвечают за загрузку соответствующего драйвера при обнаружении нового устройства. Если устройство добавляется в систему, в которой нет нужного драйвера устройства, компоненты исполнительной системы, отвечающие за поддержку PnP, вызывают сервисы установки устройств, поддерживаемые диспетчером PnP пользовательского режима.
•Диспетчер электропитания, также в тесном взаимодействии с диспетчером ввода-вывода, управляет системой и драйверами устройств при их переходе в различные состояния энергопотребления.
•Процедуры поддержки Windows Management Instrumentation (WMI) (Инструментарий управления Windows), образующие провайдер WDM (Windows Driver Model) WMI, позволяют драйверам устройств выступать в роли провайдеров, взаимодействуя со службой WMI пользовательского режима через провайдер WDM WMI. (Подробнее о WMI см. раздел «Windows Management Instrumentation главы 4.)
5
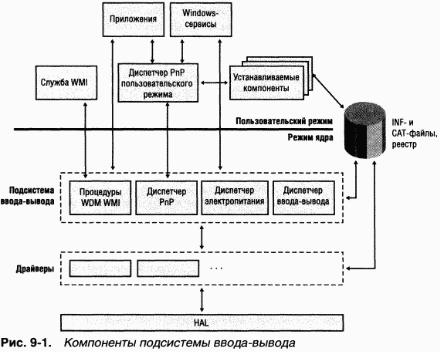
• Реестр служит в качестве базы данных, в которой хранится описание основных устройств, подключенных к системе, а также параметры инициализации драйверов и конфигурационные настройки (см. главу 4).
•Для установки драйверов используются INF-файлы; они связывают конкретное аппаратное устройство с драйвером, который берет на себя ведущую роль в управлении этим устройством. Содержимое INF-файла состоит из инструкций, описывающих соответствующее устройство, исходное и целевое местонахождение файлов драйвера, изменения, которые нужно внести в реестр при установке драйвера, и информацию о зависимостях драйвера. B САТ-файлах хранятся цифровые подписи, которые удостоверяют файлы драйверов, прошедших испытания в лаборатории
Microsoft Windows Hardware Quality Lab (WHQL).
•Уровень абстрагирования от оборудования (HAL) изолирует драйверы от специфических особенностей конкретных процессоров и контроллеров прерываний, поддерживая API, скрывающие межплатформенные различия. B сущности HAL является драйвером шины для тех устройств на
материнской плате компьютера, которые не контролируются другими драйверами.
6

10.Управление составными томами. Перекрытые, чередующиеся, зеркальные.
Начиная с Windows 2000 поддерживаются следующие типы составного тома 1). Перекрытые тома.
2). Зеркальные тома.
3). Чередующиеся тома.
4). RAID-5.
Перекрытый том – единый логический том, который может состоять из нескольких разделов на одном или нескольких дисках (количество ограничено 32 диска). Чем больше дисков в логическом томе, тем выше риск выхода из строя тома (теряется только часть данных).
Чередующийся том – группа разделов, расположенных на отдельном диске и объединенных в один логический том(RAID-0). Чем больше устройств, тем выше риск потери данных (потеряются все данные, т.к. они равномерно распределены на томе). Каждая область 64 кб.
Плюс выше скорость доступа, минус ненадежность.
Зеркальный том – задача продублировать данные, находящиеся в разделе на одном диске в разделы равного объема на другие диски(RAID-1).
Плюс надежность.
Единственный вид тома, который может использоваться как загрузочный диск и на нем могут располагаться системные файлы.
Внешняя память – все носители, предназначенные для хранения информации.
Microsoft (MS-DOS)
1). Организация в системе MS-DOS разделения жестких дисков на разделы. 2). Поддержание различных файловых систем(FAT-12, FAT-16).
3-4 версия ограничивала число разделов, 5 версия не ограничивала, могут иметь произвольные размеры.
Windows NT
1). Унаследовала разделение жестких дисков на разделы.
2). Расширила эти возможности.
Диск – физическое устройство внешней памяти(дискета, диск и т.д.). Сектор – блок фиксированного объема(512 байт, на CD-ROM 2 Кб). Раздел – набор непрерывных секторов на диске.
Простой том – объект, который представляет собой секторы одного раздела(эти разделы драйвера файлов управляют как единым целым).
Составной том – объект представляет секторы нескольких разделов, которыми драйверы управляют как единым целым.
Механизм разбиения на разделы
Начиная с Windows 2000 появляются разделы 1). Базовые диски.
2). Динамические диски.
Базовые диски – диски, размеченные по схеме MS-DOS.
Динамические диски – гибкая схема разбиения, чем в базовом диске. Позволяет ввести поддержку составления составных томов.
По умолчанию ОС Windows NT управляет дисками как базовыми. Преобразование в динамические вручную. Ограничения 1). Новые составные тома могут создаваться только на динамических дисках
Минус, динамический диск, формат разбиения не совместим со старыми форматами.
Управление составными томами
FtDisk и DMIO отвечают за представление томов, управляемых драйверами файловой системы, и за перенаправление ввода-вывода, адресованного томам, в нижележащие разделы, составляющие тома. B случае простых томов диспетчер томов преобразует смещение в томе в смещение на диске, суммируя смещение в томе со смещением тома от начала диска.
Составные тома более сложны, поскольку составляющие их разделы могут быть несмежными и даже находиться на разных дисках. Некоторые типы составных томов используют избыточность данных и требуют еще более сложной трансляции. Таким образом, FtDisk и DMIO должны
7
обрабатывать все запросы ввода-вывода, адресованные составным томам, и определять, на какие разделы следует направлять тот или иной запрос.
B Windows поддерживаются следующие типы составных томов:
•перекрытые (spanned volumes);
•зеркальные (mirrored volumes);
•чередующиеся (striped volumes);
•RAID-5.
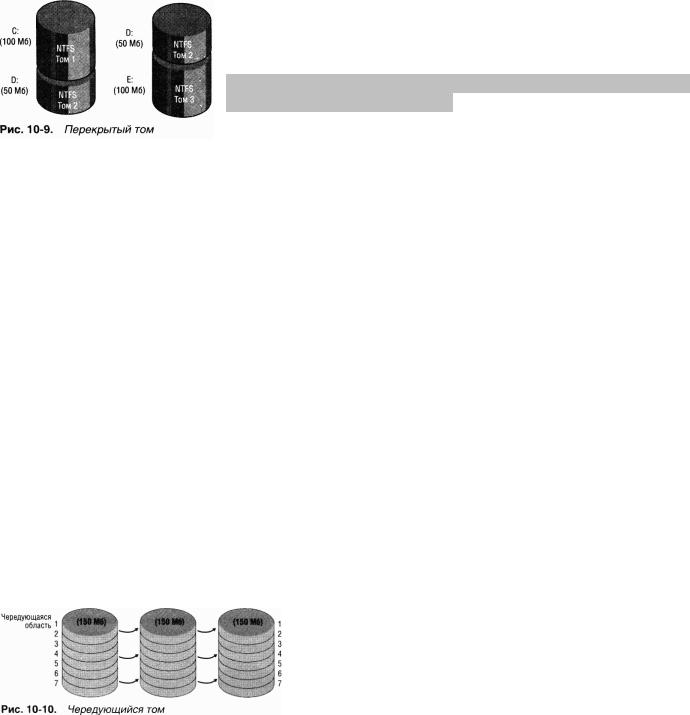
Перекрытые тома
Перекрытый том — единый логический том, состоящий из нескольких (до 32) свободных разделов на одном или нескольких дисках. Оснастка Disk Management (Управление дисками) консоли MMC объединяет разделы в перекрытый том, который затем можно отформатировать для любой файловой системы, поддерживаемой Windows. Ha рис. 10-9 показан 100-мегабайтный перекрытый том с именем D:, созданный из последней трети первого диска и первой трети второго диска. B Windows NT 4 перекрытые тома назывались наборами томов (volume sets).
Перекрытый том удобен для объединения небольших областей свободного дискового пространства в единый том большего объема или для создания из нескольких малых дисков одного большого тома. Если перекрытый том отформатирован для NTFS (стандартная файловая система для семейства операционных систем Microsoft Windows NT), его можно расширять, добавляя другие свободные области или диски, и это не влияет на данные, уже хранящиеся на томе. Расширяемость — одно из самых
крупных преимуществ описания всех данных на томе NTFS как единого файла. Размер логического тома NTFS может динамически увеличиваться, поскольку битовая карта, регистрирующая состояние тома, — не более чем еще один файл, файл битовой карты. Этот файл может быть расширен для учета пространства, добавляемого в том. C другой стороны, динамическое расширение тома FAT потребовало бы расширения самой FAT, что привело бы к смещению всех данных на диске.
Диспетчер томов скрывает физическую конфигурацию дисков от файловых систем, установленных в Windows. Например, на рис. 10-9 файловая система NTFS рассматривает том D: как обыкновенный 100-мегабайтный том. Чтобы определить свободное пространство на этом томе, NTFS обращается к своей битовой карте. Далее она вызывает диспетчер томов для чтения или записи данных с конкретного смещения в байтах относительно начала тома. Диспетчер томов последовательно нумерует физические секторы перекрытого тома от первой области первого диска до последней области последнего диска. Он определяет, какой физический сектор и на каком диске соответствует указанному смещению.
Чередующиеся тома
Чередующийся том — группа разделов (до 32), каждый из которых размещается на отдельном диске и объединяется в один логический том. Чередующиеся тома также называются томами RAID уровня 0, или томами RAID-0. Ha рис. 10–10 показан чередующийся том, состоящий из трех разделов, каждый из которых находится на отдельном диске. (Раздел чередующегося тома не обязательно занимает весь диск; единственное ограничение — все разделы на каждом диске должны быть одинаковы.)
Файловой системе этот чередующийся том кажется обычным 450-мегабайтным томом, но диспетчер томов оптимизирует хранение и выборку данных па таком томе, распределяя их между физическими дисками.
8
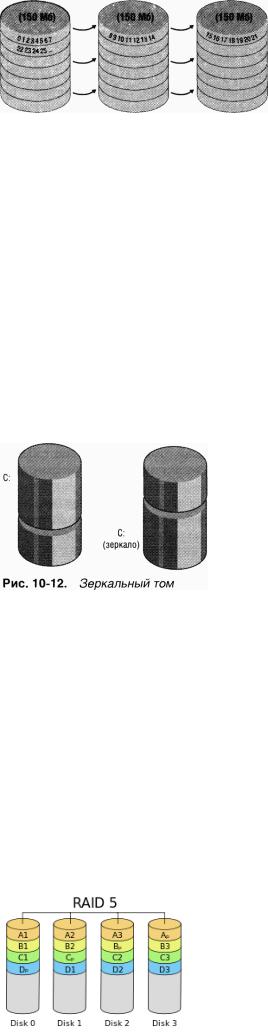
Диспетчер томов обращается к физическим секторам дисков так, как показано на рис. 10–11.
Рис. 10–11. Логическая нумерация физических секторов в чередующихся томах
Поскольку каждая чередующаяся область занимает всего 64 Кб (это значение выбрано для того, чтобы отдельные операции чтения и записи не требовали обращения сразу к
двум дискам), данные более-менее равномерно распределяются между дисками. Таким образом, чередование увеличивает вероятность того, что несколько одновременно ожидающих выполнения операций ввода-вывода потребуют доступа к разным дискам. A поскольку к данным на всех трех дисках можно обращаться одновременно, время задержки при дисковом вводе-выводе часто снижается, особенно в условиях высокой нагрузки.
Чередующиеся тома упрощают управление томами и позволяют распределять нагрузку между несколькими дисками, значительно ускоряя ввод-вывод. Ho это не обеспечивает восстановления данных в случае сбоя диска. B связи с этим диспетчер томов реализует три механизма избыточности: зеркальные тома, тома RAID-5 и замена секторов. Эти возможности можно задействовать через оснастку Disk Management.
Зеркальные тома
B зеркальном томе содержимое раздела на одном диске дублируется в разделе равного размера на другом диске. Такие тома иногда называют томами RAID уровня 1, или томами RAID-1.
Когда программа что-то записывает на диск C:, диспетчер томов помещает те же данные в идентичный участок на зеркальный раздел. Если первый диск (или часть данных на нем) окажется поврежденной из-за аппаратного или программного сбоя, диспетчер томов автоматически обратится за нужными данными к зеркальному разделу. Зеркальный том можно отформатировать для любой файловой системы, поддерживаемой Windows. При этом драйверы файловых систем остаются независимыми —
зеркалирование никак на них не влияет.
Зеркальные тома способствуют увеличению пропускной способности операций чтения в сильно загруженных системах. При высокой интенсивности ввода-вывода диспетчер томов распределяет операции чтения между первичным и зеркальным разделом (учитывая количество незавершенных запросов ввода-вывода для каждого диска). Две операции чтения могут быть выполнены одновременно, т. е. теоретически вдвое быстрее. При модификации файла приходится вести запись в оба раздела зеркального набора, но запись на диск выполняется асинхронно, и дополнительная операция записи почти не влияет на быстродействие программ пользовательского режима.
Зеркальный том — единственный тип составного тома, допустимого для системного и загрузочного томов. Дело в том, что загрузочный код Windows, включая код MBR и Ntldr, не обладает сложной логикой, необходимой для работы с составными томами. Зеркальные тома составляют исключение, так как загрузочный код воспринимает их как простые тома, считывая данные с той половины зеркального тома, которая помечена как загрузочный или системный диск в таблице разделов MBR. Поскольку загрузочный код не модифицирует данные на диске, он может игнорировать вторую
половину зеркального тома.
9
RAID 5 — дисковый массив с чередованием и «невыделенным диском чётности»;
Основным недостатком уровней RAID от 2-го до 4-го является невозможность производить параллельные операции записи, так как для хранения информации о чётности используется отдельный контрольный диск. RAID 5 не имеет этого недостатка. Блоки данных и контрольные суммы циклически записываются на все диски массива, нет асимметричности конфигурации дисков. Под контрольными суммами подразумевается результат операции XOR (исключающее или). Xor обладает особенностью, которая даёт возможность заменить любой операнд результатом, и, применив алгоритм xor, получить в результате недостающий операнд. Например: a xor b = c (где a, b, c — три диска рейд-массива), в случае если a откажет, мы можем получить его, поставив на его место c и проведя xor между c и b: c xor b = a. Это применимо вне зависимости от количества операндов: a xor b xor c xor d = e. Если отказывает c тогда e встаёт на его место и проведя xor в результате получаем c: a xor b xor e xor d = c. Этот метод по сути обеспечивает отказоустойчивость 5 версии. Для хранения результата xor требуется всего 1 диск, размер которого равен размеру любого другого диска в raid.
(+): RAID5 получил широкое распространение, в первую очередь, благодаря своей экономичности. Объём дискового массива RAID5 рассчитывается по формуле (n-1)*hddsize, где n — число дисков в массиве, а hddsize — размер наименьшего диска. Например, для массива из четырех дисков по 80 гигабайт общий объём будет (4 — 1) * 80 = 240 гигабайт. На запись информации на том RAID 5 тратятся дополнительные ресурсы и падает производительность, так как требуются дополнительные вычисления и операции записи, зато при чтении (по сравнению с отдельным винчестером) имеется выигрыш, потому что потоки данных с нескольких дисков массива могут обрабатываться параллельно.
(-): Производительность RAID 5 заметно ниже, в особенности на операциях типа Random Write (записи в произвольном порядке), при которых производительность падает на 10-25% от производительности RAID 0 (или RAID 10), так как требует большего количества операций с дисками (каждая операция записи сервера заменяется на контроллере RAID на три - одну операцию чтения и две операции записи). Недостатки RAID 5 проявляются при выходе из строя одного из дисков — весь том переходит в критический режим (degrade), все операции записи и чтения сопровождаются дополнительными манипуляциями, резко падает производительность. При этом уровень надежности снижается до надежности RAID-0 с соответствующим количеством дисков (то есть в n раз ниже надежности одиночного диска). Если до полного восстановления массива произойдет выход из строя, или возникнет невосстановимая ошибка чтения хотя бы на еще одном диске, то массив разрушается, и данные на нем восстановлению обычными методами не подлежат. Следует также принять во внимание, что процесс RAID Reconstruction (восстановления данных RAID за счет избыточности) после выхода из строя диска вызывает интенсивную нагрузку чтения с дисков на протяжении многих часов непрерывно, что может спровоцировать выход какого-либо из оставшихся дисков из строя в этот наименее защищенный период работы RAID, а также выявить ранее необнаруженные сбои чтения в массивах cold data (данных, к которым не обращаются при обычной работе массива, архивные и малоактивные данные), что повышает риск сбоя при восстановлении данных.
Минимальное количество используемых дисков равно трём.
10