САПР / lab3
.docЛабораторна робота №3.
Тема. Вивчення різних підходів до моделювання еволюції динамічної системи на прикладі системи Лотки-Вольтерра.
(1) Реалізація динаміки системи в середовищі МатЛаб (метод оснований на отриманні чисельного розв’язку системи диф. рівнянь).
Завдання.
1. Побудувати чисельний розв'язок (динаміку) системи Лотки-Вольтерри з допомогою солвера ode45.
Система має вигляд:
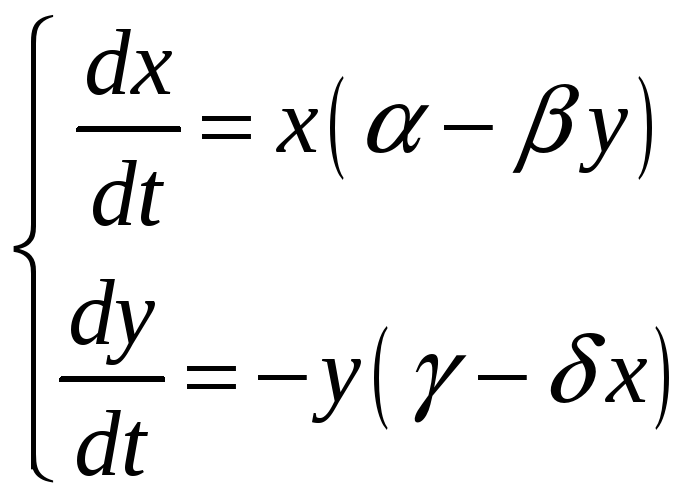 .
.
x(t) – к-сть популяції жертв
y(t) – к-сть хижаків
Завдання.
Побувати:
-
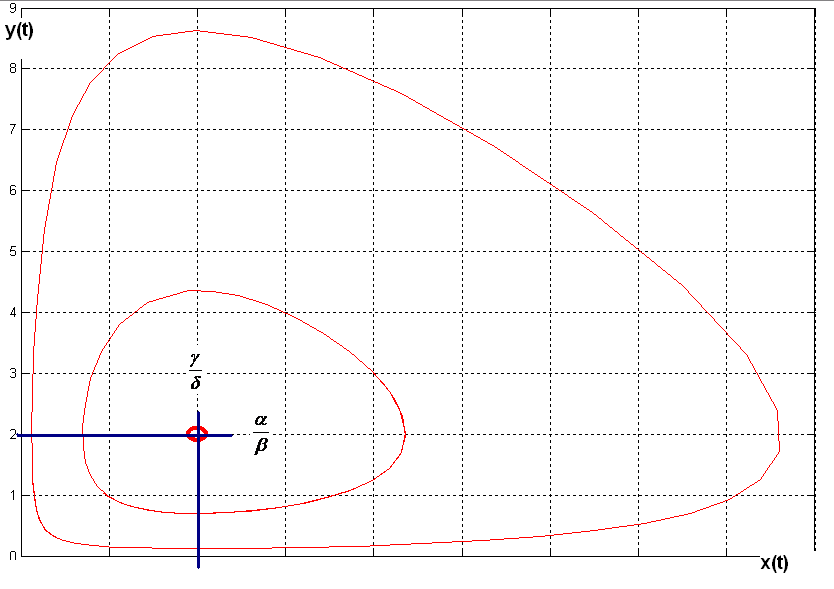
графік залежності чисельності хижаків від чисельності жертв при різних початкових умовах (мал.1)
-
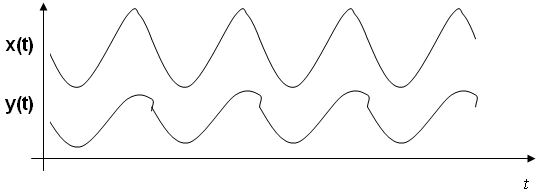
графіки залежності числа жертв від часу та графік залежності числа хижаків від часу в одному вікні (мал. 2).
-
Намалювати особливу точку, визначивши її координати. Ці координати є точками перетину прямих
 .
.
-
Представити у звіті дані моделювання при різних параметрах системи і різних початкових умовах. При цьому параметр
 задати рівним номеру комп'ютера студента
в класі.
задати рівним номеру комп'ютера студента
в класі.
 мал.1.
мал.1.

мал.2
Вказівки:
1).
Записати систему рівнянь Лотки-Вольтерри
з використанням змінних
![]() ,
,
![]() .
.
2) Динаміка системи повинна мати вигляд, як зображено на малюнку 1.
Особлива точка – центр. Поблизу особливої точки фазові траєкторії є еліпсоподібними фігурами.
3) Файл-функція для системи рівнянь:
function f=nazva(t,y).
Задати
значення змінних
![]() ,
описавши їх з допомогою функції
,
описавши їх з допомогою функції
![]() .
.
Файл-функція повинна мати 2 вхідних аргументи: змінну по якій проводиться диференціювання і вектор, розмір якого рівен числу невідомих функцій системи:
f=[a; b] ;
a-права частина першого рівняння системи,
b- права частина другого рівняння системи.
Праві
частини рівнянь задаються функціональними
залежностями від невідомих координат,
причому номер змінної пишеться в дужках:
![]() ,
або
,
або
![]() .
.
4) Розв'язати задачу використавши солвер ode45.
Вхідними аргументами солвера є ім'я файл-функції в апострофах, вектор з початковим та кінцевим значенням часу спостереження за системою, та вектор початкових умов.
вектор початкових умов:
y0=[поч.к-сть жертв ; початкова к-сть хижаків];
Вихідних аргументів 2: вектор, що містить значення часу та матриця значень невідомих функцій у відповідні моменти часу. Значення функцій розміщені по стовпцях матриці, а саме: в стовпці 1 – значення першої функції, в стовпці 2 – значення другої функції і т.д.
[t, y] = ode45('файл-функція', [діапазон часу без розділових знаків], вектор поч.умов);
5) Вивести результат виконання функції в графічному вигляді з використанням функції програми plot(), призначеної для візуалізації функції одної змінної, векторних і матричних даних.
6) Виведення точки рівноваги: малювання кола малого радіуса з координатами точки рівноваги (см.вище пояснення)
m=[0:0.02:2*pi];
R=0.1
x1=R*sin(m)+x10;
x2=R*cos(m)+x20;
plot(x1,x2,'r.-')
x10,x20 - вирахувані координати точки рівноваги.
7) Виконати
моделювання при різних параметрах
системи та різних початкових умовах.
Дані представити у звіті.
При цьому параметр
![]() задати рівним номеру комп'ютера студента
в класі.
задати рівним номеру комп'ютера студента
в класі.
Звіт
Результати моделювання еволюції системи Лотки-Вольтерри.
|
Параметри системи |
Результат моделювання |
|
1)Введення параметрів системи.
графік залежності чисельності хижаків від чисельності жертв при параметрах:
|
|
|
Часові залежності чисельностей популяцій |
|
|
Точка рівноваги має координати:
|
… |
|
Початкові чисельності популяцій: |
… |
|
Чисельності популяцій в моменти часу t=8, t=10, t=12 : |
При t=8: x=…, y=… При t=10: x=…, y=… При t=12: x=…, y=…
|
|
2). Змінені параметри системи. Нові значення змінені на (+\-) 3
|
|
|
Нове значення точки рівноваги:
|
… |
|
Нові значення початкових чисельностей популяцій змінені на (+\-) 5: |
… |
|
Чисельності популяцій в вибрані моменти часу t=…, t=…, t=… : |
… |