

Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “ Метод эквивалентной гармонической линеаризации” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Тюмень 2004
Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: к.т.н., доцент Макарова Л.Н., к.т.н. Макаров А.В.,
аспирант Фомин В.В.
Ответственный редактор: к.т.н., доцент Макарова Л.Н.
@ Государственное образовательное учреждение высшего
профессионального образования “ Тюменский государственный нефтегазовый университет”
Тюмень 2004
Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “ Метод эквивалентной гармонической линеаризации” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Председатель РИС Проректор
Перевощиков С.И. “ ” 200 г.
Рассмотрено на заседании
Подписи авторов Ученого совета ИНиГ
Протокол № от 200 г.
Подпись

Председатель совета
Рассмотрено на заседании
методической комиссии
Протокол № от 200 г
Подпись

Председатель метод. комиссии
Тюмень 2004
1. Краткие сведения и алгоритм метода эквивалентной гармонической линеаризации
Данный метод относится к приближенным методам исследования устойчивости автоколебаний нелинейных систем.
Его алгоритм:
Построить уравнение линейной части (при условии, что входной сигнал равен нулю);
Записать уравнение нелинейной части;
Построить линеаризованное уравнение замкнутой нелинейной системы;
Выделить в линеаризованном уравнении характеристическое уравнение, подставить в него
 и записать в первой форме комплексного
числа:
и записать в первой форме комплексного
числа:
 ;
;
Мнимую часть приравнять к нулю и найти значения частот, обеспечивающих это равенство (решить уравнение относительно ω)
 ;
;Найденные значения
 подставить вX(ω;а)
и приравнять X(а)
к нулю:
подставить вX(ω;а)
и приравнять X(а)
к нулю:
X( а)=0
а)=0
Из X(
 а)=0
найти амплитуду автоколебаний (решить
уравнение относительно а;
а)=0
найти амплитуду автоколебаний (решить
уравнение относительно а;Проверить выполнение неравенства:
при
каждой
 .
.
Если
неравенство для выбранного
 ,
выполняется то
,
выполняется то —
частота устойчивых автоколебаний; если
неравенство не выполняется, то устойчивых
автоколебаний с этой частотой нет.
—
частота устойчивых автоколебаний; если
неравенство не выполняется, то устойчивых
автоколебаний с этой частотой нет.
2. Пример
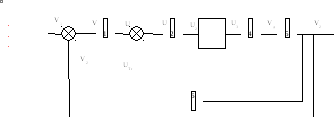
Исследовать устойчивость состояния системы, структурная схема которой приведена на (Рис.1).
|
|
|
|
|
Рис.1. Структурная схема: 1- чувствительный элемент; 2- релейный усилитель; 3- нелинейный усилитель; 4- исполнительный двигатель; 5- редуктор; 6- тахогенератор | ||


Решение:
Составляем уравнения элементов структурной схемы:
1.1. Уравнение чувствительного элемента:
U1=KV; V=V1–V2, где K— коэффициент усиления.
1.2. Уравнение релейного усилителя
(T1P+1)U2=K2U; U=U1–UTr, где K2— коэффициент усиления,
T1—постоянная времени.
1.3. Уравнение нелинейного усилителя
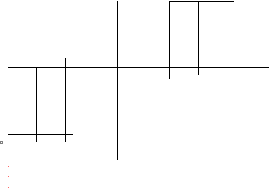
U3=F(U2) (Рис.2)
|
|
U2 U3 c b -b -c |
|
|
Рис.2. Характеристика нелинейного усилителя: b=0,25в; C=110в=U3max | ||
1.4. Уравнение исполнительного двигателя
(Tmp+1)pVд=K3U3, где Vд- угол поворота двигателя;
K3- коэффициент передачи двигателя;
Tm- электромеханическая постоянная времени.

K3=
Здесь U3max— максимальное напряжение на выходе релейного усилителя;
N0— скорость вращения холостого хода двигателя;
I— момент инерции всех вращающихся частей двигателя;
M0— пусковой момент двигателя;
1.5. Уравнение тахогенератора
UTr=KUpVд, где KU— крутизна статической характеристики тахогенератора.
1.6. Уравнение редуктора
V2=K5
Vд,
где
 ,
гдеi—
передаточное число редуктора.
,
гдеi—
передаточное число редуктора.
Дифференциальное уравнение линейной части имеет вид:

Для каждого вида нелинейности, в общем уравнении линеаризации, записывается зависимость выходной характеристики от входной:
U3

Значения q(a) и q1(a) выбираются из таблицы (Прил.1.) в зависимости от вида нелинейности.
Для приведенной в примере нелинейности
q(a)= ,a
,a
 =0,
т.е.
U3=q(a)*U2
=0,
т.е.
U3=q(a)*U2
Общее уравнение всей системы с учетом нелинейного звена и при отсутствии входного сигнала (равного нулю) имеет вид:
[Т1Тнр3+(Т1+Т2)р2+р+kg(a)]U2=0, где k=k1k2k3k5.
Выделяем характеристическое уравнение:
D(p)=T1TMp3+(T1+TM)p2+p+kg(a)=0.
Условие устойчивости в системе периодических решений вида U2=Asinωt можно найти, используя критерий Михайлова.
Для этого в D(p) заменяется p на jω, выделяется в полученном выражении D(jω)=X(ω)+jY(ω) действительная и мнимая часть.
X(ω;a)=kg(a)–(T1+T2)ω2
Y(ω;a)=ω(1–T1TMω2)
Мнимую часть приравнивается к нулю и находятся корни:
Y(ω;a)=0
ω(1–T1TMω2)=0
=> ω1=0
, ω2,3=±1/ ,
,
т.е. ω1=0— Тривиальное решение,
Второе
решение ω2=
Найденное ω2 подставляем в X(ω0)=0
X(ω2;a)=Kq(a)–(T1–T2)·
 =0,
и учитывая, чтоq(a)=
=0,
и учитывая, чтоq(a)=
 =
=
Полученное уравнение разрешается относительно a:


Найденное
периодическое решение устойчиво, если
выполняется неравенство при найденной
частоте ω=
В нашем примере
 =
= ,
(
,
( )
)
 =–2(T1+T2)
ω
=–2(T1+T2)
ω
 =1-3T1Tm
ω2
=1-3T1Tm
ω2
 =0
=0
 ;
;
Проверяется условие устойчивости
 (1)
(1)
2b2–a2<0
; a>b .
.
Для определения характера устойчивости проведем расчет для заданных значений параметров системы, а именно:
K1=57,3 в/рад ; K2=2,5 ; K3=5,73 рад/в*с ; K4=0 ; K5=0,001 ; T1=0,05c ; TM=0,05c ; C=110в=Uзmax ; b=0,25в.
Квадратное уравнение:
0,4a4-616,6a2+3,85=0
, где 0,4=
 =0,1/0,52
=0,1/0,52
616,6=16·1102/π
3,25=(16·1102/π)·0,252
имеет два корня
a1=0.257 и a2=2,86
Проверяется условие устойчивости автоколебаний при a1=0,257;
b =0.25*1.4=0.35;
должно выполнятся неравенство a1>b
=0.25*1.4=0.35;
должно выполнятся неравенство a1>b ;
но 0,257<0,35, поэтому, a1=0.257
не является амплитудой автоколебаний.
;
но 0,257<0,35, поэтому, a1=0.257
не является амплитудой автоколебаний.
Проверяется условие устойчивости автоколебаний при a2=2.86; 2,86>0.35 => a2=2.86 — есть амплитуда автоколебаний с частотой:
ω= =1/0,05=20
(1/с).
=1/0,05=20
(1/с).
Замечание 1.
Частота
автоколебаний во всей системе одинаковая,
меняется ее амплитуда. Так, амплитуда
Замечание 2.
Амплитуда и частота автоколебаний зависит от параметров системы.
Так,
в разобранном примере частота ω= ,
определяется постоянными времениT1
и Tm;
критическое значение амплитуды позволяет
найти критическое значение коэффициента
усиления.
,
определяется постоянными времениT1
и Tm;
критическое значение амплитуды позволяет
найти критическое значение коэффициента
усиления.
Так
как a>b ,
то критическое значение Kкр
найдем из условия равенства a=
b
,
то критическое значение Kкр
найдем из условия равенства a=
b .
Кроме того,
.
Кроме того,
q(a)= ,
тогдаKкр=
,
тогдаKкр=

q(b )=
)=
Ккр=
В рассматриваемом примере критическое значение коэффициента усиления линейной части системы равно:
Kкр= =0.0057
(1/с)
=0.0057
(1/с)
Замечание 3.
Система с устойчивыми автоколебаниями можно привести в состояние устойчивого покоя (автоколебания отсутствуют), например, введением отрицательной обратной связи. Так, при K4=10-2 (в·с/рад) автоколебания в системе отсутствуют, ее состояние устойчиво.