

Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “Метод гармонического баланса” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Тюмень 2004
Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: к.т.н., доцент Макарова Л.Н., к.т.н. Макаров А.В.,
аспирант Фомин В.В.
Ответственный редактор: к.т.н., доцент Макарова Л.Н.
@ Государственное образовательное учреждение высшего
профессионального образования “ Тюменский государственный нефтегазовый университет”
Тюмень 2004
Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
“Тюменский государственный нефтегазовый университет”
Институт нефти и газа
Методические указания и задания к практическим
занятиям по “Теории автоматического управления”
на тему “Метод гармонического баланса” для студентов специальностей АТП и УИТС очной и заочной форм обучения
Председатель РИС Проректор
Перевощиков С.И. “ ” 200 г.
Рассмотрено на заседании
Подписи авторов Ученого совета ИНиГ
Протокол № от 200 г.
Подпись

Председатель совета
Рассмотрено на заседании
методической комиссии
Протокол № от 200 г
Подпись

Председатель метод. комиссии
Тюмень 2004
1. Основные сведения
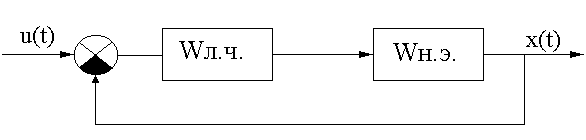
Метод гармонического баланса основывается на следующих рассуждениях. Нелинейная система может быть представлена в виде двух составляющих: линейной части и нелинейного элемента (Рис.1).
|
|
|
|
|
Рис.1. Стандартное преобразование нелинейной системы | ||
Если U(t)=0, то ее удобнее представить как на (Рис.2):
|
|
|
|
|
Рис.2. Структурная схема нелинейной системы при нулевом управляющем воздействии | ||
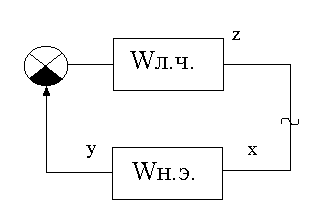
При размыкании системы перед входом в нелинейный элемент и при условии, что автоколебания в системе есть, выполняются следующие соотношения между сигналами:
y = x∙Wн.э. =>
z = –y∙Wл.ч. =>
z = – x ∙ Wн.э. ∙Wл.ч.
т.е. x = – x ∙ Wн.э. ∙Wл.ч., что справедливо для всех значений времени t, то есть:
x ∙ (1+ Wн.э. ∙Wл.ч.) = 0 или 1+ Wн.э. ∙Wл.ч. =0.
Принимая гипотезу фильтра, т.е. считая, что все гармоники, кроме первой имеют незначительные амплитуды, считаем, что
x = A∙sinωt,
y = A(gsinωt + bcosωt),
или в комплексной форме
x̃ = Aejωt; ỹ = A(g + jb)∙ejωt = x̃ ∙ (g + jb); z̃ = -Wл.ч.(jω)(g + jb)x̃; т.к.
g + jb = Wн.э.(А), то z̃ = - Wл.ч.(jω) Wн.э.(А)∙x̃, т.е
1+ Wн.э(А)∙Wл.ч.(jω) = 0
или
|
|
|
(1)
|

или
|
|
|
(2)
|

Первое равенство было предложено Л.С. Гольдфарбом (СССР), второе, немного позднее, Р. Коченбургером (США). Эти равенства позволяют найти графоаналитические решения задачи определения условий автоколебаний в нелинейной системе.
Для этого строят графики функций по (1) Wл.ч.(jω) - амплитудно-фазовую частотную характеристику линейной части и Gн.э. — кривая гармонического коэффициента передачи (по американской терминологии), или описывающую функцию G(jω) и Wн.э.(A), находят точки пересечения этих кривых, определяют для этих точек значение частоты и амплитуды.
Замечание. Для этого при построении кривых нужно отмечать в точках значения частоты и на второй кривой – значения амплитуды. Значения частоты и амплитуды в точках пересечения получают интерполяцией соседних точек.
2. Пример
Линейная часть состоит из двигателя постоянного тока и безынерционного усилителя. Ее передаточная функция имеет вид:
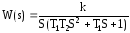 ,где
,где
k — общий коэффициент усиления линейной части;
T1 — электромеханическая постоянная времени;
T2 — электромагнитная постоянная времени.
Нелинейный элемент представляет собой поляризованное реле с зоной нечувствительности. Реле срабатывает мгновенно. Его статическая характеристика
 ,
где М — постоянная.
,
где М — постоянная.
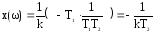
Вычисляется обратная амплитудная фазочастотная характеристика


Годограф пересекает действительную ось, когда мнимая часть равна нулю, т.е.
 и
и

Эта частота является порождающей частотой. Отрезок, отсекаемый от действительной оси годографом, вычислим, подставив в ω действительную часть G(jω).
Выходная величина y(t) может быть представлена первыми членами ряда Фурье:
 ,где
,где
 ,
где φ=ωt
,
где φ=ωt
При симметричных нелинейных характеристиках y = 0, т.к. f(x)- однозначная, то y(t) совпадает по фазе с x(t), т.е. косинусоидальные составляющие равные нулю, т.е. b = 0.
 ,
,
где α находится из соотношения
 ,
тогда
,
тогда
 , тогда
, тогда
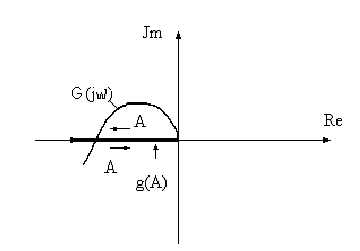
Меняя A, получаем g(A) , график имеет вид отрезка на действительной оси (Рис.3).
|
|
|
|
|
Рис.3. Функции G(jω) и g(A) | ||
Тогда приравнивая x(ω) и g(A), найдем значение A:


 ,
,
 ,
,
 .
.
Замечание 1. Точка пересечения G(jω) и g(A) одна, но ей соответствуют два значения амплитуды, первое значение получается при движении вдоль оси при увеличении A (движение вправо), затем при дальнейшем увеличении A g(A) начинает двигаться справа налево и пересечет G(jω) второй раз.
Замечание
2.
Если


 ,
то пересечения характеристик не
произойдет, и автоколебаний в системе
нет.
,
то пересечения характеристик не
произойдет, и автоколебаний в системе
нет.