

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
государственное образовательное учреждение высшего профессионального образования «Тюменский государственный нефтегазовый университет»
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра «Автоматизации и управления»
Методические указания к лабораторным и практическим занятиям по дисциплине «Теория автоматического управления» для студентов специальностей «Автоматизация технологических процессов», «Электропривод и автоматика промышленных установок и технологических комплексов»
«Расчет настроек регуляторов по кривой отклика»
Тюмень 2005
Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н., Макарова Л.Н.
к.т.н., Макаров А.В.
асс. Попова Н.В.
@ Государственное образовательное учреждение высшего профессионального образования
«Тюменский государственный нефтегазовый университет» 2005
СОДЕРЖАНИЕ
-
Содержание 3
-
Получение кривой отклика 4
-
Получение характеристик объекта 4
-
Расчет настроек Зиглера – Никольса по кривой 4
отклика 5
-
Настройки Коэна – Куна 5
-
Пример 6
-
Пример расчета лабораторной в среде MatLab 12
-
Задания для самостоятельной работы 21
-
Список литературы 22
Расчет регуляторов может производиться по кривой отклика по алгоритму:
-
Получение кривой отклика
-
Фиксируется установившееся значение входной и выходной величины (u0; x0);
-
В момент времени t0 изменяется значение u0 на 10 – 20% от u0, т.е. новое значение скачком устанавливается
-
(1,1 – 1,2) u0 = u1;
-
После окончания переходного процесса измеряется x1.
-
Получение характеристик объекта по кривой отклика
-
Строится касательная с наибольшим углом наклона;
-
Определяется время t2 пересечения этой касательной линии х1;
-
Вычисляются параметры:
-
![]() ;
0
= t1-t0;
;
0
= t1-t0;
0 = t2 - t1, где t1 – момент времени, в который выходная величина начинает отслеживать изменение управления, приложенное в момент t0 (t1>t0), t2 – значение времени, при котором касательная пересекает линию установившегося значения x1 (Рисунок 1).
Замечание.
В п. 3.3 коэффициент передачи
![]() вычислен в абсолютных
единицах, он может быть вычислен в
безразмерном виде:
вычислен в абсолютных
единицах, он может быть вычислен в
безразмерном виде:
 .
.
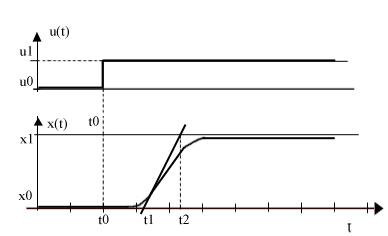
Рисунок 1. Реакция объекта на ступеньку [4]
-
Расчет настроек Зиглера – Никольса по кривой отклика
-
Задаются определенной скоростью затухания переходного процесса x(t); в данном методе ее принимают равной 4.
-
Настройки рассчитывают согласно таблице 1.
Таблица 1- Настройки Зиглера – Никольса по кривой отклика
|
Закон |
k |
Tu |
Tд |
|
П |
|
- |
- |
|
ПИ |
|
30 |
|
|
ПИД |
|
20 |
0,50 |
-
Настройки Коэна – Куна выполняются согласно таблице 2.
Таблица 2 - Настройки Коэна – Куна по кривой отклика
|
Закон |
k |
Tu |
Tд |
|
П |
|
- |
- |
|
ПИ |
|
|
|
|
ПИД |
|
|
|
Замечание:
Перерегулирование и время регулирования
в системе в значительной степени зависят
от отношения
![]() .
Чем оно меньше, тем больше
и tp.
.
Чем оно меньше, тем больше
и tp.
-
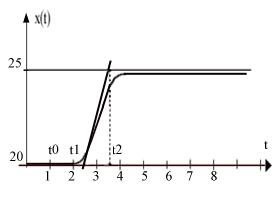
Пример. Подобрать настройки ПИ и ПИД регулятора по кривой отклика, заданной на рисунке 2, методом Зиглера – Никольса и Коэна – Куна, если u0 = 5; u1 = 7; объект задан передаточной функцией
![]() .
.

Рисунок 2. Кривая отклика к примеру 1; t0 = 1
Построить переходные характеристики, определить и сравнить прямые показатели качества.
-
Строим касательную с наибольшим наклоном;
-
t1 = 2 (время начала движения x(t));
-
t2 = 3,6;
-
х0 = 20; х1 = 25;
-
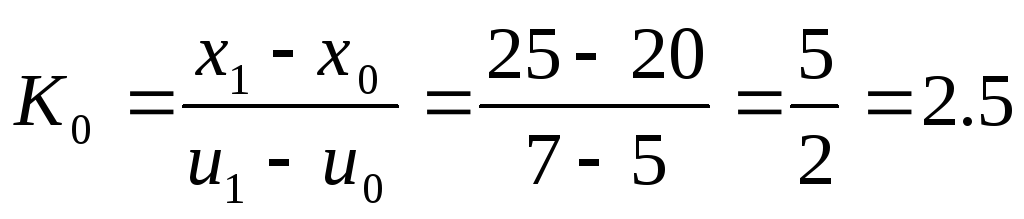 ;
; -
0 = t1- t0 = 1;
-
T0 = t2 - t1 = 3,6 – 2 = 1,6;
-
Рассчитываем настройки ПИ регулятора по таблице 1 (Зиглера – Никольса):
-
![]() ;
;
TU1 =3*1=3с.
Тогда передаточная функция ПИ – регулятора имеет вид
![]() .
.
По таблице 2 (Коэна – Куна)
![]() ;
;
![]() .
.
Передаточная функция ПИ – регулятора по методу Коэна – Куна имеет вид
![]() .
.
-
Передаточная функция разомкнутой системы для первого регулятора имеет вид
![]() .
.
Передаточная функция замкнутой системы
![]() .
.
Изображение переходной характеристики
![]() .
.
Переходная характеристика вычисляется
![]() .
.
График приведен на рисунке 4, перерегулированиеПИ1= 6%, время регулирования tpПИ1= 8,2с.
-
Передаточная функция разомкнутой системы с ПИ – регулятором с настройками Коэна – Куна имеет вид:
![]() ,
,
тогда передаточная функция замкнутой системы
![]() ;
;
![]() ;
;
график приведен на рисунке 5.
Перерегулирование в этом случае составило:
ПИ2= 42%, время регулирования tpПИ2= 5,65с.
Рассчитываем параметры ПИД – регулятора по Зиглеру – Никольсу:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
-
Передаточная функция этого регулятора
![]() .
.
-
Передаточная функция системы с этим регулятором:
для разомкнутой системы
![]() .
.
для замкнутой системы
![]() .
.
-
Изображение переходной характеристики
![]()
и ее оригинал
 .
.
График приведен на рисунке 6.
Перерегулирование в этом случае равно ПИ2= 17,5%, время регулирования tpПИ2= 7,8с.
-
Параметры ПИД – регулятора, рассчитанные по методу Коэна – Куна, имеют вид:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Передаточные функции системы:
разомкнутой
![]() ,
,
замкнутой
![]() .
.
-
Изображение переходной характеристики имеет вид
![]() .
.
Переходная характеристика
h(t)=L-1(H(p)), её график представлен на рисунке 7. Прямые показатели качества равны
ПИД4= 27%, tpПИД4= 4,35с.
-
Перерегулирование и время регулирования для всех случаев сведено в таблицу 4.
Таблица 4 - Время регулирования и перерегулирование для регуляторов с вычисленными настройками
-
Метод расчета
Закон
Перерегулирование
, %
Время регулирования tp, c
Зиглера –
- Никольса
ПИ
6
8,2
ПИД
17,5
7,8
Коэна –
- Куна
ПИ
42
5,65
ПИД
27
4,35
-
Решение примера по расчету настроек ПИ-регулятора в командном интерфейсе MatLab
-
Задание передаточной функции объекта
 в командной строке MatLab
можно осуществить следующим образом:
в командной строке MatLab
можно осуществить следующим образом:
-
Представим передаточную функцию объекта в виде последовательного соединения двух звеньев (sys1 и sys2).
Звено
![]() в общем виде можно представить как
в общем виде можно представить как
 ,
тогда для задания передаточной функции
данного звена нам потребуется команда
‘[Num,
Den]=pade(T,N)’
, где T
– период дискретизации, а N
– число членов ряда, от которого зависит
точность расчетов.
,
тогда для задания передаточной функции
данного звена нам потребуется команда
‘[Num,
Den]=pade(T,N)’
, где T
– период дискретизации, а N
– число членов ряда, от которого зависит
точность расчетов.
>> [num,den]=pade(1,5)
num =
1.0e+004 *
-0.0001 0.0030 -0.0420 0.3360 -1.5120 3.0240
den =
1.0e+004 *
0.0001 0.0030 0.0420 0.3360 1.5120 3.0240
>> sys1=tf(num,den)
Transfer function:
-s^5 + 30 s^4 - 420 s^3 + 3360 s^2 - 1.512e004 s + 3.024e004
------------------------------------------------------------
s^5 + 30 s^4 + 420 s^3 + 3360 s^2 + 1.512e004 s + 3.024e004
>> sys2=tf([2.5],[1.6 1])
>> Wobj=series(sys1,sys2)
-
Зададим передаточные функции регуляторов с найденными по таблице настройками:
ПИ – регулятор Зиглера – Никольса:
piregZ_N=tf([0.576*3 1],[3 0])
ПИ – регулятор Коэна - Куна:
piregK_K=tf([1.48*0.61 1],[1.48 0])
-
Для первого регулятора определим передаточную функцию разомкнутой системы. Это есть последовательное соединение регулятора и объекта:
Z_Nrazomk=series(piregZ_N,Wobj)
7.2.2. Определим передаточную функцию замкнутой системы:
Z_Nzamk=feedback(Z_Nrazomk,1)
7.2.3. Изображение переходной характеристики:
>> a=tf([1],[1 0])
>> H=series(Z_Nzamk,a)
7.2.4. Строим реакцию на единичное воздействие
(см. рисунке 4):
>> step(Z_Nzamk),grid
С помощью правой кнопки мышки можно выбрать интересующие нас характеристики.
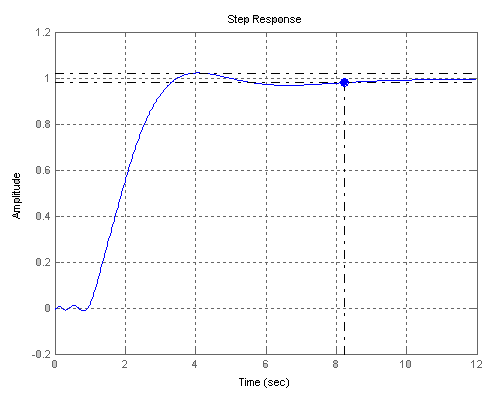
Рисунок 4 – Переходная характеристика системы с настройками ПИ – регулятора подобранными методом Зиглера – Никольса
7.3 Расчет ПИ-регулятора с настройками Коэна-Куна
7.3.1. Для второго регулятора определим передаточную функцию разомкнутой системы. Это есть последовательное соединение регулятора и объекта:
K_Krazomk=series(piregK_K,Wobj)
7.3.2. Определим передаточную функцию замкнутой системы:
K_Kzamk=feedback(K_Krazomk,1)
7.3.3. Изображение переходной характеристики:
>> a=tf([1],[1 0])
>> H=series(K_Kzamk,a)
7.3.4. Строим реакцию на единичное воздействие
(см. рисунок 5):
>> step(K_Kzamk),grid
С помощью правой кнопки мышки можно выбрать интересующие нас характеристики.
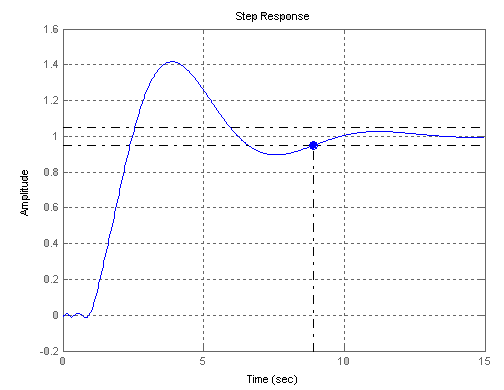
Рисунок 5 – Переходная характеристика системы с настройками ПИ – регулятора подобранными методом Коэна - Куна
7.4. Для ПИД – регулятора с настройками, подобранными методом Зиглера – Никольса:
7.4.1 ПИД – регулятор Зиглера – Никольса:
pidregZ_N=tf([0.768*8.8 0.768*4.2 0.768*1],[0.8 4 0])
7.4.2. Определим передаточную функцию разомкнутой системы. Это есть последовательное соединение регулятора и объекта:
Z_Nrazomk=series(pidregZ_N,Wobj)
7.4.3. Определим передаточную функцию замкнутой системы:
Z_Nzamk=feedback(Z_Nrazomk,1)
7.4.4. Изображение переходной характеристики:
>> a=tf([1],[1 0])
>> H=series(Z_Nzamk,a)
7.4.5. Строим реакцию на единичное воздействие
(см. рисунок 6):
>> step(Z_Nzamk),grid
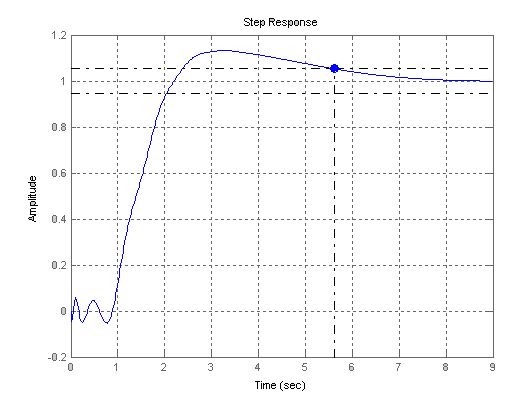
Рисунок 6 – Переходная характеристика системы с настройками ПИД – регулятора, подобранными методом Зиглера – Никольса
7.5. Для ПИД – регулятора с настройками, подобранными методом Коэна – Куна:
7.5.1. ПИД – регулятор Коэна - Куна:
>> pidregK_K=tf([0.36*0.98 0.36*0.123 0.36],[0.034 1 0])
7.5.2. Определим передаточную функцию разомкнутой системы. Это есть последовательное соединение регулятора и объекта:
>> K_Krazomk=series(pidregK_K,Wobj)
7.5.3. Определим передаточную функцию замкнутой системы:
>> K_Kzamk=feedback(K_Krazomk,1)
7.5.4. Изображение переходной характеристики:
>> H=series(K_Kzamk,a)
7.5.5. Строим реакцию на единичное воздействие (см. рисунок 7):
>> step(K_Kzamk),grid
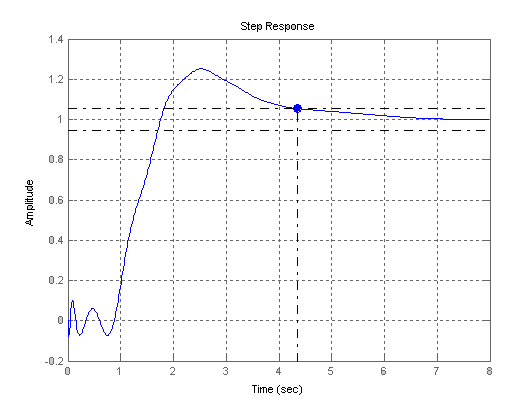
Рисунок 7 – Переходная характеристика системы с настройками ПИД – регулятора подобранными методом Коэна – Куна
7.6. Строим АЧХ системы, график представлен на рисунке 8.
>> ffplot(K_Kzamk)
7.6.1. Настройки Зиглера – Никольса для ПИ – регулятора:


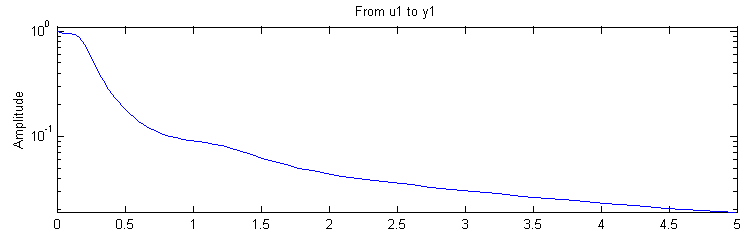
![]()
Рисунок 8. АЧХ замкнутой системы: ПИ – регулятор (метод Зиглера – Никольса)
7.6.2. Настройки Коэна - Куна для ПИ – регулятора:


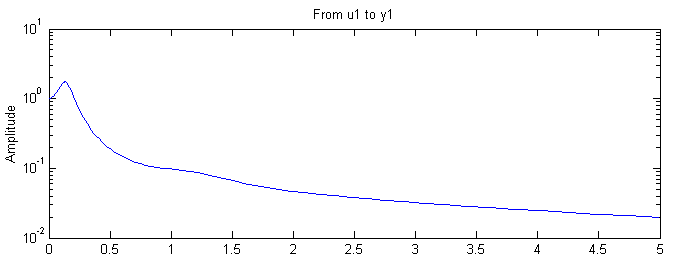
Рисунок 9. АЧХ замкнутой системы: ПИ – регулятор (метод Коэна - Куна)
![]()
7.6.3. Настройки Зиглера – Никольса для ПИД – регулятора:
![]()


Рисунок 10. АЧХ замкнутой системы: ПИД – регулятор (метод Зиглера – Никольса)
![]()
7.6.4. Настройки Коэна - Куна для ПИД – регулятора:

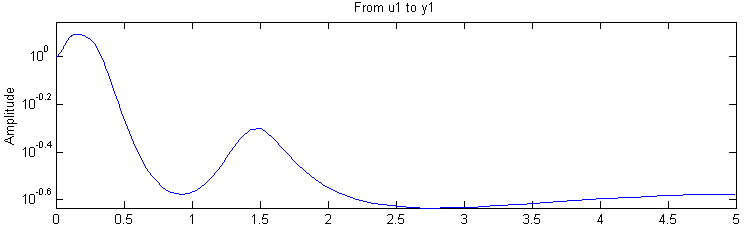
Рисунок 11. АЧХ замкнутой системы: ПИД – регулятор (метод Коэна - Куна)
![]()
7.7. Сводная таблица результатов расчетов
-
Метод Зиглера - Никольса
Метод Коэна – Куна
ПИ
ПИД
ПИ
ПИД
K
0,576
0,768
0,61
0,95
Tи
3
2
1,48
1,98
tp
8,2
7,8
5,65
4,35
6
17,5
42
27
М
1
1,091
1,746
1,245