

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Тюменский государственный нефтегазовый университет»
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра «Автоматизации и управления»
Методические указания к лабораторным и практическим занятиям по дисциплине «Теория автоматического управления» для студентов специальностей «Автоматизация технологических процессов», «Электропривод и автоматика промышленных установок и технологических комплексов»
РАСЧЕТ НАСТРОЕК НЕПРЕРЫВНЫХ РЕГУЛЯТОРОВ ПО ЧАСТОТНОМУ ПОКАЗАТЕЛЮ КОЛЕБАТЕЛЬНОСТИ
Тюмень 2005
Утверждено редакционно-издательским советом
Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Макарова Л.Н.
к.т.н. Макаров А.В.
асс. Лапик Н.В.
@ Государственное образовательное учреждение высшего профессионального образования
«Тюменский государственный нефтегазовый университет» 2005
СОДЕРЖАНИЕ
-
Содержание……………………………………………………………3
-
Основные сведения…………………………………………………...4
-
Алгоритм подбора настроек ПИ – регулятора……………………...6
-
Особенности расчета настроек ПИД-регулятора…………………...10
-
Пример расчета………………………………………………………11
-
Расчет настроек непрерывного ПИ-регулятора в пакете «Matlab»……………………………………………………………….19
-
Задание для самостоятельной работы……………………………….27
-
Приложение…………………………………………………………...29
-
Литература…………………………………………………………….31
-
Основные сведения
-
Частотный показатель колебательности М определяется как отношение максимального значения амплитудно-частотной характеристики замкнутой системы (при резонансной частоте) к её значению при ω=0
-
![]() ,
,
где
![]() ,
,
![]() –
АФЧХ разомкнутой
системы,
–
АФЧХ разомкнутой
системы,
![]() – АФЧХ замкнутой
системы.
– АФЧХ замкнутой
системы.
Если
![]() ,
то
,
то ![]() .
.
Если разомкнутая
система астатическая порядка ν (в ней
есть одно или несколько интегрирующих
звеньев, что соответствует наличию в
знаменателе
![]() множителя
множителя
![]() ),
то
),
то
![]() .
.
-
На границе устойчивости показатель колебательности равен Мдоп, при этом АФЧХ разомкнутой системы проходит через точку (-1;j0).
2.3. Линии равных
значений показателя колебательности
представляют собой окружности с центром
![]() и
радиусом
и
радиусом
![]() .
.
Доказательство
При ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() /
/
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
что соответствует уравнению
![]() .
.
-
Т.к. показатель колебательности не должен превышать допустимого значения, то АФЧХ разомкнутой системы не должна заходить в область, ограниченную окружностью, построенной для Мдоп, а только касаться её. На этом построен алгоритм подбора настроек регулятора.
-
Алгоритм подбора настроек пи – регулятора
3.1. Если показатель
колебательности системы не задан, а
известны прямые показатели качества:
перерегулирование
![]() и время регулирования tp,то
по номограммам (Приложение 1) находят
Мдоп,
определяя его последовательно: по первой
номограмме по заданному перерегулированию
σ определяют
Pmax
(по
и время регулирования tp,то
по номограммам (Приложение 1) находят
Мдоп,
определяя его последовательно: по первой
номограмме по заданному перерегулированию
σ определяют
Pmax
(по
![]() );
по найденному Pmax
находят L
и γ ;
а по ним Мдоп.
(по третьей номограмме М ( L;
γ)).
);
по найденному Pmax
находят L
и γ ;
а по ним Мдоп.
(по третьей номограмме М ( L;
γ)).
3.2. Вычисляются координаты центра окружности и её радиус
![]() ,
,
строится окружность на комплексной плоскости.
3.3. Задаются значениями Ти и Кр, и для них строится АФЧХ разомкнутой системы
![]() .
.
Если Wp (jω) заходит в окружность, Кр нужно уменьшить (Тu =const), если не касается окружности, то Кр нужно увеличивать до тех пор, пока АФЧХ не коснется окружности, получившиеся значения Тu и Кр заносятся в таблицу.
3.4. Выбирается другое значение Ти2 и подбирается соответствующее значение Кр2.
3.5. Все данные заносятся в таблицу (таблица 1)
Таблица1
Оптимальными
являются те значения, для которых
отношение
![]() имеет наибольшее значение.
имеет наибольшее значение.
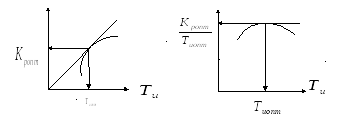
3.6 Оптимальные
значения
 и
и
![]() можно определить из графиков или
можно определить из графиков или
![]() ,
или
,
или
![]() (Рисунок 1).
(Рисунок 1).
а
![]()
![]()
![]()
Рисунок 1. Графики зависимости коэффициента усиления и постоянной времени интегрирования
В первом случае из начала координат проводится касательная, во втором находится точка экстремума.
3.7. Замечания по
поводу выбора исходных значений
![]() .
.
3.7.1.
Начальное
![]() может быть вычислено из условия границы
устойчивости
может быть вычислено из условия границы
устойчивости
![]()
![]()
Нужно задать
произвольную частоту
![]() ,
выразить
,
выразить
 .
.
Т огда
получаются два уравнения
огда
получаются два уравнения
![]()
с двумя неизвестными
![]() и
и
![]() .
.
Решая их, находят
начальные значения
![]() и
и
![]() .
.
3.7.2.
Из опыта известно, что оптимальные
настройки не должны значительно
отличаться от наибольшей постоянной
времени объекта. Поэтому выбирается
наибольшая постоянная времени объекта,
на её основе строится интервал
![]() ,
задаётся шаг так, чтобы число шагов
было не менее
,
задаётся шаг так, чтобы число шагов
было не менее
![]() ,
и для каждого
,
и для каждого
![]() из этого интервала проводится процедура
подбора
из этого интервала проводится процедура
подбора
![]() .
.
3.8. Проверяется фактическое значение показателя колебательности с выбранными настройками. Для этого:
3.8.1.
Записывается передаточная функция
регулятора с выбранными значениями
коэффициента усиления
![]() и постоянной интегрирования
и постоянной интегрирования
![]()
![]() .
.
3.8.2. Записывается передаточная функция разомкнутой системы
![]() .
.
3.8.3. Записывается передаточная функция замкнутой системы
![]() .
.
3.8.4. Оператор
![]() заменяется на
заменяется на
![]() (
(![]() ),
вычисляется модуль АФЧХ замкнутой
системы
),
вычисляется модуль АФЧХ замкнутой
системы
![]()
и строится график получившейся АЧХ (рисунок 2).
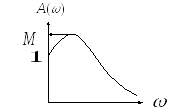
Рисунок 2. График амплитудно-частотной характеристики
3.8.5 По графику
определяется фактическое значение
показателя колебательности как
максимальное значение ординаты
![]() (для астатической
системы; для статической по формуле М).
(для астатической
системы; для статической по формуле М).
3.8.6.
Сравниваются получившееся значение
частотного показателя колебательности
М и допустимое значение; если
![]() ,
расчет удовлетворительный, если нет,
то нужно изменить интервал варьирования
,
расчет удовлетворительный, если нет,
то нужно изменить интервал варьирования
![]() и провести повторный расчёт.
и провести повторный расчёт.