

Федеральное агентство по образованию
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра Кибернетических систем
Методические указания
к лабораторной работе № 4
по дисциплине «Теория автоматического управления»
на тему «Синтез линейных систем»
Тюмень 2008
1 Цель работы: для заданной динамической системы управления с помощью частотного метода ЛАЧХ определить непрерывное корректирующее устройство, добавление которого в систему позволяет получить необходимые показатели качества процесса управления.
2 Теоретические сведения
При синтезе систем автоматического управления (САУ) могут быть выделены следующие частные задачи:
обеспечение устойчивости;
повышение запаса устойчивости;
повышение точности регулирования в типовых режимах;
улучшение качества переходных процессов.
Если при решении задачи повышения запаса устойчивости и качества САУ невозможно добиться положительных результатов простым изменением параметров системы (коэффициентов передачи отдельных звеньев, постоянных времени и т.п.), в таком случае возникает необходимость введения в САУ дополнительных устройств. Обеспечение устойчивости и качественной работы САУ с помощью дополнительных устройств называется коррекцией, а сами устройства – корректирующими.
Благодаря своей простоте метод логарифмических частотных характеристик оказывается наиболее простым методом синтеза стационарных линейных систем. Так как для минимально-фазовых систем существует однозначная зависимость между ЛАЧХ и ЛФЧХ, при синтезе системы достаточно построить желаемую ЛАЧХ.
В инженерной практике синтез корректирующих устройств с помощью логарифмических частотных характеристик осуществляется в следующем порядке:
1) по виду передаточной функции WН(р) строится ЛАХ исходной разомкнутой
нескорректированной САУ![]() ;
;
2) с учетом всей совокупности требований,
предъявляемых к качеству процесса
регулирования САУ, строится желаемаялогарифмическая амплитудная частотная
характеристика![]() разомкнутой системы;
разомкнутой системы;
3) на основании сравнения ЛАХ
нескорректированной системы
![]() с желаемой
с желаемой![]() определяется ЛАХ корректирующего звена
определяется ЛАХ корректирующего звена![]() .
Так как у минимально-фазовых систем ЛАХ
однозначно определяет весь характер
переходного процесса, то для осуществления
синтеза достаточно рассмотрения одних
ЛАХ;
.
Так как у минимально-фазовых систем ЛАХ
однозначно определяет весь характер
переходного процесса, то для осуществления
синтеза достаточно рассмотрения одних
ЛАХ;
4) по виду
![]() определяются передаточная функция
корректирующего звена WКЗ(р), ее параметры и техническая
реализация;
определяются передаточная функция
корректирующего звена WКЗ(р), ее параметры и техническая
реализация;
5) производится проверочный расчет переходного процесса с учетом реальной структуры и места включения корректирующего звена, оценка запасов устойчивости и показателей качества скорректированной САУ.
Если скорректированная САУ удовлетворяет заданным показателям качества, то синтез на этом заканчивается. В противном случае уточняется структура и параметры корректирующего звена; далее снова производится проверочный расчет.
2.1 Схемы включения корректирующих звеньев
Корректирующие звенья включаются в структурную схему системы последовательно либо в цепь обратной связи (параллельно).
2.1.1 Последовательная коррекцияэто коррекция САУ с помощью корректирующего устройства, последовательно включенного в прямую цепь системы (непосредственно в контур регулирования).
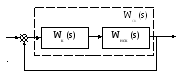
Рисунок 1 – последовательная коррекция
Wнск(s) – передаточная функция нескорректированной системы;
Wк(s) – передаточная функция корректирующего звена;
Wск(s) – передаточная функция скорректированной системы.
Суть методики синтеза заключается в определении Wск(s), обеспечивающей заданные показатели качества управления и в расчете по нейWк(s).
Wск (s) = Wк (s) · Wнск (s),
Wск (jω) = Wк (jω) · Wнск (jω),
|Wск (jω)| = |Wк (jω)| · |Wнск (jω)|,
Lск (ω) = Lк (ω) + Lнск (ω),
Lк (ω) = Lск (ω) - Lнск (ω).
По полученному графику Lк(ω) восстанавливают соответствующую передаточную функцию (ПФ) корректирующего устройстваWк(s).
Корректирующие звенья последовательного типа могут составляться из различной по своей физической природе элементов – электрических, механических, гидравлических и т.д. Наиболее просто такие звенья могут быть составлены из электрических R-,C- иL-элементов. Последовательное корректирующее устройство часто включают или непосредственно после датчика рассогласования, или после предварительного усилителя.
Последовательные корректирующие звенья.
пассивные интегрирующие звенья, подавляют усиление на высоких частотах (ВЧ) и вносят в некотором интервале частот отрицательный фазовый сдвиг;
пассивные дифференцирующие звенья, подавляют низкие частоты (НЧ) и вносят положительный фазовый сдвиг;
интегро-дифференцирующие звенья, подавляют усиление в некотором интервале средних частот (СЧ), вносимый фазовый сдвиг вначале отрицателен, затем нулевой, а при дальнейшем росте становится положительным.
2.1.2 Параллельная коррекцияэто коррекция САУ с помощью корректирующего устройства, включенного в цепь специальной обратной связи. Обратные связи имеют наиболее широкое применение вследствие простоты технической реализации. К тому же, корректирующие устройства различного типа оказывают различное влияние на содержащиеся в системе нелинейности. Отрицательные же обратные связи имеют свойство уменьшать влияние нелинейностей тех участков цепи регулирования, которые ими охватываются.
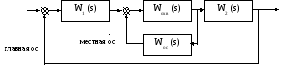
Рисунок 2 – параллельная коррекция
Wнск (s) = W1 (s) · Wохв (s) · W2 (s),
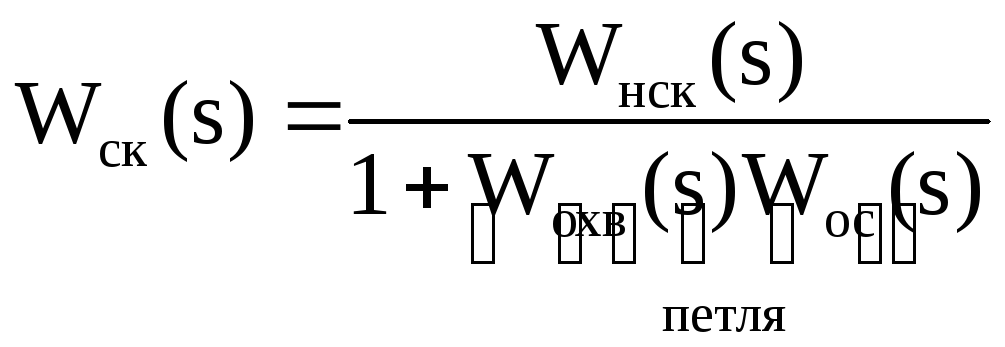 ,
,
![]() ,
,
![]() .
.
1 рассмотрим диапазон частот, где
![]() <<
1, это область низких частот.
<<
1, это область низких частот.
![]() ,
,
![]() .
.
2 рассмотрим диапазон частот, где
![]() >>
1. В этом случае
>>
1. В этом случае
![]() ,
,
![]() ,
,
![]() .
.
Таким образом, для нахождения ЛАЧХ корректирующего звена необходимо построить 5 графиков:
Lнск (ω);
Lск (ω);
Lп (ω) = Lнск (ω) - Lск (ω);
Lохв (ω);
Lос (ω) = Lп (ω) - Lохв (ω).
В качестве корректирующего звена при
параллельной коррекции обычно используется
дифференцирующее звено с замедлением:
![]() ,
,![]() может быть больше и меньше 1.
может быть больше и меньше 1.