

15-10-2013_16-30-05 / Синтез 3 (Л6)
.docФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра Кибернетических систем
Методические указания
к лабораторной работе № 6
по дисциплине «Теория автоматического управления»
на тему «Параметрический синтез линейных систем регулирования с оценкой запаса устойчивости по максимуму АЧХ замкнутой системы»
Тюмень 2008
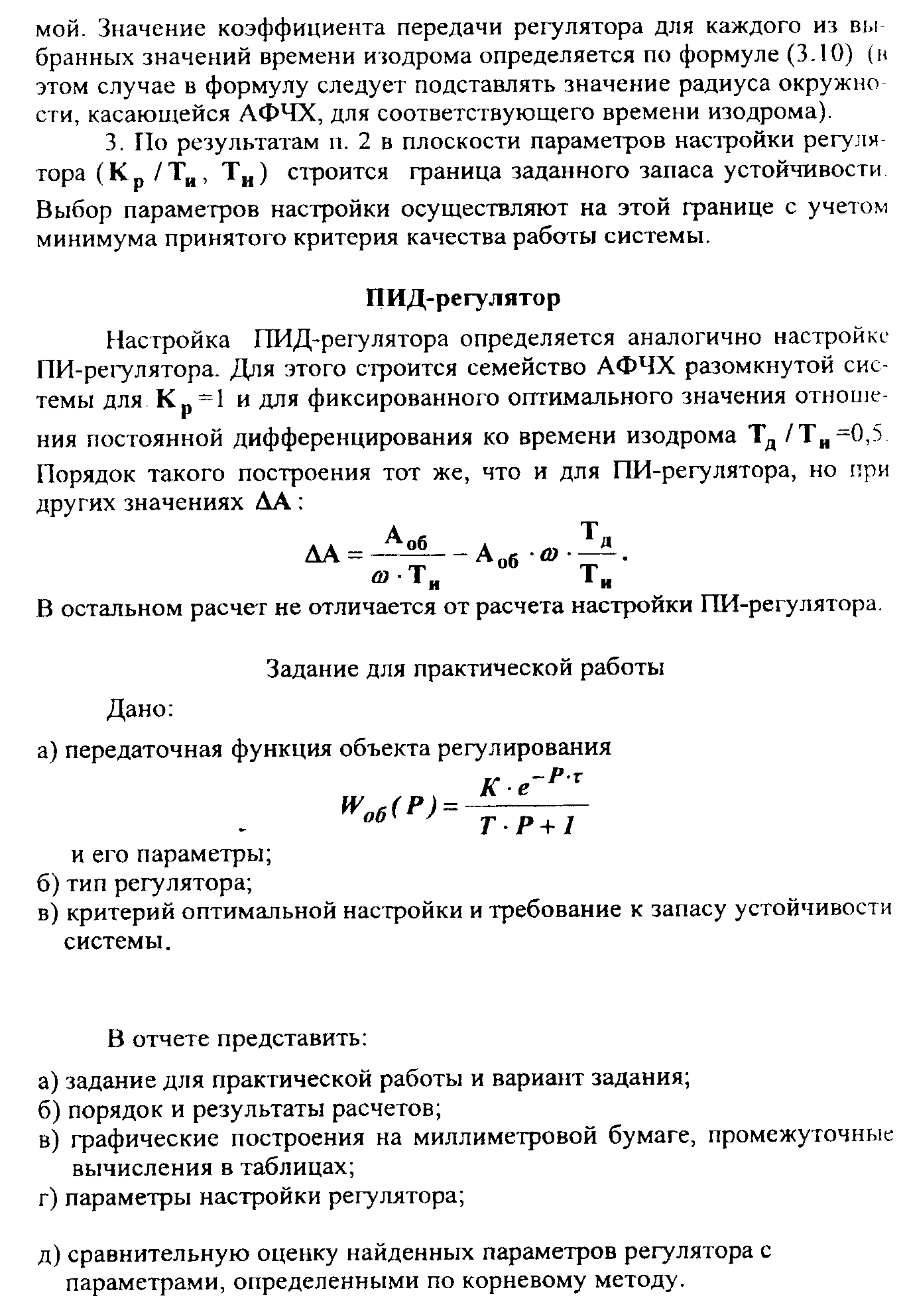
Цель работы: для системы управления, заданной передаточной функцией, необходимо опередить параметры для указанного закона регулирования с использованием метода В.Я.Ротача.
Частотные показатели качества. В качестве частотных показателей качества используют резонансный пик, полосу пропускания, запас устойчивости по фазе и запас устойчивости по амплитуде.
Резонансным пиком или показателем колебательности называется отношение максимально значения Аm к начальному значению А(0):
![]() .
.
В большинстве систем управления считается желательным, чтобы резонансный пик находится в пределах от 1,1 до 1,5. Частота ωр, при которой A(ω) достигает максимального значения (Аm = А(ωр)), называется резонансной частотой.
Полосой пропускания называют диапазон частот (0; ωп), где ωп — частота, при которой А(ωп) принимает значение 0,707А(0).

Варианты задания
|
Номер варианта |
|
|
|
|
Тип регулятора |
Критерий качества |
|
1 |
1 |
10 |
2 |
0,75 |
П |
- |
|
2 |
2 |
80 |
5 |
0,8 |
И |
- |
|
3 |
1 |
80 |
10 |
0,85 |
ПИ |
|
|
4 |
1 |
100 |
10 |
0,9 |
ПД |
|
|
5 |
1 |
100 |
20 |
0,95 |
ПИ |
|
|
6 |
3 |
50 |
7 |
0,75 |
ПИ |
|
|
7 |
2 |
90 |
20 |
0,8 |
П |
- |
|
8 |
1 |
70 |
15 |
0,9 |
П |
- |
|
9 |
5 |
70 |
10 |
0,9 |
И |
- |
|
10 |
1 |
200 |
30 |
0,85 |
И |
- |
|
11 |
1 |
150 |
30 |
0,9 |
ПИ |
|
|
12 |
2 |
120 |
25 |
0,95 |
ПИ |
|
|
13 |
3 |
120 |
40 |
0,75 |
ПД |
|
|
14 |
5 |
100 |
15 |
0,8 |
ПИ |
|
|
15 |
1 |
130 |
30 |
0,75 |
ПИ |
|
|
16 |
1 |
140 |
25 |
0,85 |
ПИ |
|
|
17 |
1 |
250 |
30 |
0,9 |
ПД |
|
|
18 |
1 |
200 |
50 |
0,8 |
П |
- |
|
19 |
2 |
180 |
35 |
0,9 |
И |
- |
|
20 |
1 |
300 |
50 |
0,75 |
ПИ |
|
|
21 |
1 |
100 |
20 |
0,95 |
ПИ |
|
|
22 |
1 |
100 |
10 |
0,9 |
ПД |
|
|
23 |
1 |
80 |
10 |
0,85 |
ПИ |
|
|
24 |
2 |
80 |
5 |
0,8 |
И |
- |
|
25 |
1 |
10 |
2 |
0,75 |
П |
- |
|
26 |
1 |
130 |
30 |
0,75 |
ПИ |
|
|
27 |
5 |
100 |
15 |
0,8 |
ПИ |
|
|
28 |
3 |
120 |
40 |
0,75 |
ПД |
|
|
Номер варианта |
|
|
|
|
Тип регулятора |
Критерий качества |
|
29 |
2 |
120 |
25 |
0,95 |
ПИ |
|
|
30 |
1 |
150 |
30 |
0,9 |
ПИ |
|
|
31 |
1 |
200 |
30 |
0,85 |
И |
- |
|
32 |
5 |
70 |
10 |
0,9 |
И |
- |
|
33 |
1 |
70 |
15 |
0,9 |
П |
- |
|
34 |
2 |
90 |
20 |
0,8 |
П |
- |
|
35 |
3 |
50 |
7 |
0,75 |
ПИ |
|
|
36 |
1 |
300 |
50 |
0,75 |
ПИ |
|
|
37 |
2 |
180 |
35 |
0,9 |
И |
- |
|
38 |
1 |
200 |
50 |
0,8 |
П |
- |
|
39 |
1 |
250 |
30 |
0,9 |
ПД |
|
|
40 |
1 |
140 |
25 |
0,85 |
ПИ |
|
|
41 |
2 |
80 |
5 |
0,8 |
И |
- |
|
42 |
1 |
80 |
10 |
0,85 |
ПИ |
|
|
43 |
1 |
10 |
2 |
0,75 |
П |
- |
|
44 |
1 |
100 |
20 |
0,95 |
ПИ |
|
|
45 |
1 |
100 |
10 |
0,9 |
ПД |
|
|
46 |
5 |
70 |
10 |
0,9 |
И |
- |
|
47 |
1 |
70 |
15 |
0,9 |
П |
- |
|
48 |
3 |
50 |
7 |
0,75 |
ПИ |
|
|
49 |
1 |
200 |
30 |
0,85 |
И |
- |
|
50 |
2 |
90 |
20 |
0,8 |
П |
- |
|
51 |
5 |
100 |
15 |
0,8 |
ПИ |
|
|
52 |
3 |
120 |
40 |
0,75 |
ПД |
|
|
53 |
1 |
150 |
30 |
0,9 |
ПИ |
|
|
54 |
1 |
130 |
30 |
0,75 |
ПИ |
|
|
55 |
2 |
120 |
25 |
0,95 |
ПИ |
|
|
56 |
2 |
180 |
35 |
0,9 |
И |
- |
|
57 |
1 |
300 |
50 |
0,75 |
ПИ |
|
|
Номер варианта |
|
|
|
|
Тип регулятора |
Критерий качества |
|
58 |
1 |
140 |
25 |
0,85 |
ПИ |
|
|
59 |
1 |
200 |
50 |
0,8 |
П |
- |
|
60 |
1 |
250 |
30 |
0,9 |
ПД |
|
|
|
||||||