

СОДЕРЖАНИЕ
Введение ……………………………………………………………………….........3
-
Теоретическая часть…………………………………………………………..…5
-
Общие положения о электропривод……………..……………………...…5
-
Современный автоматизированный электропривод и тенденции
-
его развития………………………………………………………………….9
-
Двигатели постоянного тока…………………………………………….....11
-
Практическая часть……………………………………………………….….….18
2.1 Построение структурной схемы АЭП……………………………………..18
2.2 Синтез математической модели объекта…………………………….…….19
2.3 Расчет параметров ДПТ……………………………………………….……21
2.4 Построение в MatLab релейной схемы управления……………………....24
2.5 Построение в MatLab схемы управления с регулированием по
скорости……………………………………………………………………...28
2.6 Построение в MatLab схемы управления с ПИД-регулятором…………..32
2.7 Сравнительный анализ разработанных систем управления…………...…36
Выводы ………………………………………………………………………………37
Список использованных источников и литературы………………………...….…38
ВВЕДЕНИЕ
Сегодня уже трудно представить себе украинский город без работающего вертикального транспорта. Для огромного количества людей нормальная работа лифтового хозяйства является синонимом нормальной жизни. Качественная работа лифтов и подъемных механизмов и их надежность остается одним из ключевых аспектов в деле обеспечения безопасности жилых и общественных зданий, поэтому необходимо непрерывное развитие и модернизация лифтового оборудования.
Лифт – механизм вертикального транспорта, предназначенный для транспортировки пассажиров и грузов в жилых и производственных помещениях. Широкое распространение использования лифтового электропривода в промышленности и в повседневной жизни, определяет лифт как наиболее распространенный вид вертикального транспорта.
Наблюдаемая в последнее время тенденция к повышению этажности зданий в городах, а также к комфорту передвижения в лифтах ведёт к усложнению систем управления процессом передвижения. Благодаря развитию современных микропроцессорных систем управления данные задачи успешно решаются в настоящее время.
Современный лифт – это сложное электромеханическое устройство, работающее в полуавтоматическом режиме по установленной программе. Программа работы лифта определяется дейтсвиями пассажиров, местонахождением и положением (свободна или занята) кабины и регламентируется при помощи системы управления лифтом.
Система управления лифтом должна решать задачи безопасного и комфортного передвижения пасажиров. Передвижение должно осуществяться с допустимым ускорением, требуемой скоростью и отсутствие ощутимых рывков. Для выполнения приведённых требований необходимо получать информацию о положении и скорости движения кабины с помощью различных датчиков.
Большое внимание необходимо уделить вопросу безопасности передвижения в случаях пожаров и землетрясений, обрыва канатов, срабатывания ловителей.
Современные тенденции развития электропривода лебёдки и лифтового оборудования направлены в сторону отказа от машинного помещения и создания автономной конструкции лифта. То есть, лифт содержит в себе все механизмы передвижения, включая лебёдку.
Также следует отметить немаловажную роль способности системы управления остановить кабину с точностью на заданном уровне.
В настоящее время в нашей стране стоит проблема замены устаревшего лифтового оборудования. Замены редукторного электропривода с релейно-контакторной системой управления. Целесообразно использовать существующего шахтного оборудования и проводки, произвести замену лишь системы управления и приводные механизмы дверей и лебёдки лифта.
Также следует обратить внимание на использование системы управления не только для модернизации существующего лифтового оборудования, но и использование в новом строительстве.
В данном курсовом проекте будет разработана наиболее оптимальная система управления электроприводом лифта.
1 Теоретическая часть
1.1 Общие положения
Электроприводом называется электромеханическая система,
предназначенная для приведения в движение рабочих органов машин и
механизмов и управления их технологическим процессом, состоящая из
электродвигателя, преобразовательного устройства, устройства управления и передаточного устройства.
Функциональная схема автоматизированного электропривода
представлена на рис. 1.1
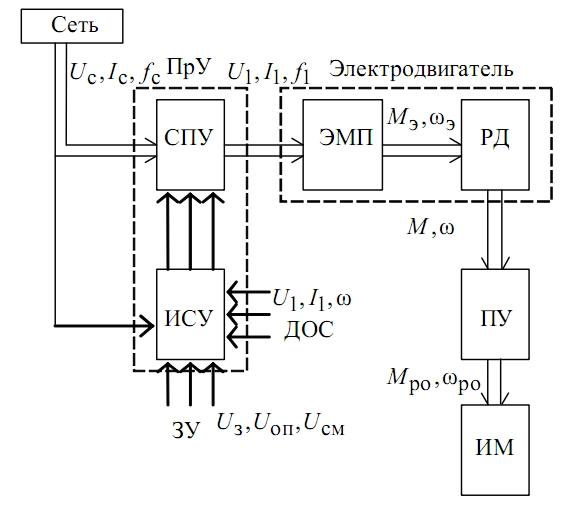
Рисунок 1.1 - функциональная схема автоматизированного электропривода
На рис.1.1 приняты следующие обозначения
ПрУ – преобразовательное устройство;
СПУ – силовое преобразовательное устройство;
ИСУ – информационная система управления;
ЭМП – электромеханический преобразователь;
РД – ротор двигателя;
ПУ – передаточное устройство;
ИМ – рабочий орган исполнительного механизма;
ЗУ – задающие устройства;
ДОС – датчики обратной связи.
Как следует из определения понятия «Электропривод», так и из
его функциональной схемы электропривод состоит из четырех основных частей:
- электрического двигателя;
- силового преобразовательного устройства;
- передаточного устройства;
- системы управления.
Вначале рассмотрим коротко составные части электропривода.
Электрические двигатели предназначены для преобразования
электрической энергии в механическую. На рис. 1.1 электрический двигатель состоит из двух частей: электромеханического преобразователя
энергии ЭМП, преобразующего электрическую энергию в электромагнитную, и ротора двигателя РД, в котором электромагнитная энергия
преобразуется в механическую. Двигатель развивает момент M на валу
ротора, который вращается с угловой скоростью ω.
По роду потребляемого тока электрические машины делятся на:
- двигатели постоянного тока;
- двигатели переменного тока.
Различают следующие электродвигатели постоянного тока:
- независимого возбуждения;
- параллельного возбуждения;
- последовательного возбуждения;
- смешанного возбуждения;
- с возбуждением от постоянных магнитов;
- с полым немагнитным якорем;
- с печатным якорем;
- с полупроводниковым коммутатором;
- магнитогидродинамические электродвигатели и т.д.
Электроприводы переменного тока могут быть реализованы на
базе следующих электродвигателей:
- асинхронных с короткозамкнутым ротором;
- асинхронных с фазным ротором;
- синхронных с независимым возбуждением;
- синхронных с постоянными магнитами;
- однофазных асинхронных двигателей;
- двойного питания;
- реактивных синхронных;
- синхронных гистерезисных;
- редукторных;
- линейных;
- коллекторных переменного тока;
- электровибрационных;
- емкостных и т.д.
Силовые преобразовательные устройства СПУ могут быть выполнены на базе следующих устройств:
- электромашинных преобразователей;
- электромагнитных преобразователей;
- полупроводниковых преобразователей.
Передаточные устройства ПУ предназначены для передачи механической энергии от электродвигателя к исполнительному механизму
ИМ и согласования вида и характера движения электродвигателя и рабочего органа исполнительного механизма. Наиболее характерные типы
передаточных устройств:
- редукторы;
- цепные передачи;
- ременные передачи;
- планетарные системы;
- кулисные механизмы;
- шарико-винтовая передача;
- электромагнитные муфты скольжения и т.д.
Системы управления электропривода представляют собой совокупность управляющих и информационных систем, предназначенных
для управления электроприводом с целью обеспечения заданного движения рабочего органа исполнительного механизма. Принципиально
системы управления различаются по уровню основных функций, которые они выполняют:
- пуск, реверс, торможение, а также поддержание угловой
скорости с невысокой точностью в статике и динамике. Такую функцию
выполняют разомкнутые релейно-контакторные системы управления
электроприводов постоянного и переменного тока;
- поддержание скорости с высокой точностью в статике, а так
же формирование требуемых переходных процессов. Такую функцию
выполняют системы «преобразователь – двигатель» с различными об-
ратными связями, например, по скорости, току двигателя, напряжению
преобразователя;
- слежение за любыми, произвольно изменяемыми входными
воздействиями. Эту функцию выполняют следящие системы;
- отработка заданной программы. Такую функцию выполняют
системы программного управления;
- выбор оптимальных режимов работы. Эту функцию выполняют адаптивные системы управления – автоматически изменяющие
свою структуру или параметры системы управления с целью, например,
выработки оптимальных режимов работы.
Выбор системы управления определяется как технологическим
процессом, так и технико-экономическими обоснованиями.
1.2. Современный автоматизированный электропривод и
тенденции его развития
Современный автоматизированный электропривод практически
полностью отвечает требованиям промышленности, сельского хозяйства и науки по требуемой мощности, диапазону регулирования скорости
и плавности ее регулирования.
Пределы мощности используемых машин в электроприводах
весьма широки – от десятков тысяч киловатт до долей ватт.
В 70-е годы ХХ века разработаны и в некоторых случаях выпускаются до настоящего времени в промышленных масштабах станочные
электрические приводы постоянного тока с транзисторными и тиристорными преобразователями с диапазоном регулирования скорости до
1: (10000 - 30000) и более.
В настоящее время основная цель серийно выпускаемых и вновь
разрабатываемых электроприводов направлена в первую очередь на
увеличение их надежности, уменьшение массогабаритных показателей,
стоимости и эксплуатационных расходов. Основные разработки современных электроприводов проводятся на базе электрических машин переменного тока.
Новые системы электроприводов переменного тока получили
распространение в связи с дальнейшим развитием микропроцессорной
техники и силовой полупроводниковой техники на полностью управляемых тиристорах (GTO) и новых поколений транзисторов, прежде
всего биполярных транзисторов с изолированным затвором (IGBT) и
МДП-транзисторов с индуцированным каналом (MOSFET).
На современной элементной базе получили возможность реализации следующие системы электроприводов:
- для асинхронного двигателя с короткозамкнутым ротором –
системы фазового управления (регулирование угловой скорости изменением напряжения), частотное регулирование (непосредственный преобразователь частоты, автономный инвертор напряжения, автономный инвертор тока), частотно-токовое управление;
- для асинхронного двигателя с фазным ротором – фазовое
управление, частотное управление в режиме машины двойного питания, каскадные схемы, системы с импульсным управлением в цепи выпрямленного тока ротора;
- для синхронных двигателей – частотное управление, частотно-токовое управление, вентильный электропривод.
Для регулируемого электропривода переменного тока появилась
необходимость разработки специальных конструкций электрических
машин переменного тока для регулирования угловой скорости, отличающихся от серийно выпускаемых асинхронных и синхронных двигателей предназначенных для работы с постоянной скоростью. Это становится необходимым, в основном, из-за перегрева машин на угловых скоростях отличных от номинальной скорости. Комплектные электро-привода должны гарантированно обеспечивать работу в заданном диапазоне скоростей без перегрева двигателя и преобразователя.