

Методрекомендації обчислювальної практ_(книга)
.pdfрізноманіття ланок, що утворюють системи керування А.В.Михайлов (1936 р.) запропонував характеризувати за деякими загальними ознаками незалежно від фізичної природи ланки: за динамічними властивостями; за типом диференціальних рівнянь, які визначають ці властивості. За Михайловим, під поняттям типових динамічних ланок прийнято розуміти пристрої будь-якого фізичного змісту та конструктивного оформлення, які описуються однаковими диференціальними рівняннями, але не вище 2-го порядку. Оскільки рівняння реальних елементів складають на основі законів, що виражаються рівняннями не вище другого порядку (закони Кірхгофа, другий закон Ньютона та ін.), тобто описують один ступінь свободи, то вони не можуть мати порядок вище другого.
Рис. 3. Схема пасивного чотириполюсника
Передавальною функцією динамічної ланки називається відношення перетворення, за Лапласом, вихідної величини (координати системи) та перетворення, за Лапласом, вхідної величини при нульових початкових умовах. Ця функція зазвичай позначається W(p). Тоді можна записати
|
= |
вих |
= |
|
2 |
|
|
. |
||
|
|
|
+ |
|
||||||
|
|
|
|
|||||||
|
|
вх |
|
|
1 |
|
2 |
|
|
|
Отже, динамічні характеристики ланки коригувального пристрою з передавальною функцією W(p) істотно залежать від комплексних опорів Z1(p) та Z2(p) які визначаються параметрами конкретних елементів електричної схеми (R, L, C).
Аперіодичною першого порядку називають ланку, диференціальне рівняння якої має вигляд (табл. А.1)
c1 вих t + c0yвих t = b0yвх t
або
11

T |
dyвих t |
+ y |
t = Ky t , |
|
|||
|
dt |
вих |
вх |
|
|
|
|
де К – коефіцієнт підсилення, Т – константа часу ланки. |
|||
Передавальна функція аперіодичної ланки першого порядку
= + 1.
Аперіодичні ланки відповідають елементам автоматичних систем які містять хоча б один накопичувач енергії. В електричних ланцюгах накопичувачем енергії електричного поля є конденсатор, а енергії магнітного поля – магнітна котушка (індуктивність). Накопичування та розсіювання енергії в аперіодичній ланці проходить не миттєво, а повільно та тим повільніше, чим більша величина константи часу Т.
Коливальною називають ланку, диференціальне рівняння
якої має вигляд (табл. А.1) |
|
|
|
|
|
|||
c2yвих t |
+ c1yвих t |
+ +c0yвих t |
= b0yвх(t) |
|||||
або |
|
|
|
|
|
|
|
|
|
d2y |
t |
dy |
вих |
t |
|
||
T2 |
вих |
|
+ 2ξT |
|
|
+ y |
t = Ky t , |
|
|
|
|
|
|
||||
|
dt2 |
|
|
|
dt |
|
вих |
вх |
де К – коефіцієнт підсилення, Т – константа часу ланки, -
коефіцієнт загасання (коефіцієнт демпфірування). Передавальна функція коливальної ланки
= 2 2 + 2 + 1.
До коливальних ланок відносять елементи автоматичних систем, які містять два накопичувачі енергії, в одному з яких накопичується потенціальна енергія, у другому — кінетична. Окрім цих двох накопичувачів енергії, у коливальній ланці повинен бути елемент, який здатен розсіювати енергію, тобто канал обміну з активним опором, за допомогою якого накопичувачі обмінюються енергією. Мірою втрат енергії в каналі обміну є коефіцієнт загасання : чим більші втрати, тим більше . Якщо 0 < < 1 процеси в елементі мають коливальний характер, причому чим менше , тим коливальність виражена більше. Гранично при = 0, коли опір каналу обміну енергії дорівнює нулю і втрати відсутні, елемент зберігає незмінним початковий запас енергії і процеси в ньому не загасають. Якщо втрати в каналі обміну енергії завеликі,
12
тобто > 1, то процес у ланці перестає бути коливальним і вона вироджується в аперіодичну ланку другого порядку з
передавальною функцією |
|
|
|
|
|
|
|
|
|||
|
= |
|
|
|
= |
|
|
|
|
|
. |
|
|
|
|
||||||||
+ 1 + 1 |
2 |
+ + |
+ 1 |
||||||||
|
1 |
2 |
|
1 |
2 |
1 |
2 |
|
|
||
Ланку |
можна |
подати |
такою, |
що |
складається з двох |
||||||
послідовно з’єднаних аперіодичних ланок першого порядку з
|
|
|
|
|
|
константами часу T = T ξ − |
ξ2 − 1 , T = T ξ + ξ2 |
− 1 , тому |
|||
1 |
2 |
|
|
|
|
вона не належить до типових динамічних ланок систем автоматичного керування. В електричних ланцюгах потенційну енергію накопичує конденсатор (енергія електричного поля), а магнітна котушка – кінетичну енергію (енергію магнітного поля). Втрати енергії (виділення тепла) відбуваються на резисторі.
Диференціальною (ідеальною диференціальною) називають ланку, диференціальне рівняння якої має вигляд
c0yвих |
t = b1yвх(t) |
||||
або |
|
|
|
|
|
y |
|
t |
= T |
dyвх t |
, |
вих |
|
||||
|
|
|
dt |
||
|
|
|
|
||
де Т – коефіцієнт перетворення ланки, [с]. |
|||||
Передавальна функція ідеальної диференціальної ланки |
|||||
|
|
= . |
|||
Коригуючи автоматичні системи за допомогою послідовних коригувальних пристроїв, потрібно відтворити диференціальну ланку засобами елементів (R, L, C) електричних схем, що на практиці неможливо. Тому в таких випадках користуються
реальними |
диференціальними |
ланками |
які |
описуються |
||||||
диференціальними рівняннями вигляду (табл. А.1) |
|
|||||||||
|
1 вих |
+ 0 вих |
|
= b1yвх(t) |
|
|||||
або |
|
|
|
|
|
|
|
|
|
|
|
T |
dyвих t |
|
+ y |
t |
= T |
dyвх |
t |
, |
|
|
|
|
|
|
|
|||||
|
1 |
dt |
|
вих |
|
|
dt |
|
|
|
де Т – коефіцієнт перетворення ланки, Т1 – константа часу аперіодичної ланки, що враховує інерційні властивості реальної диференційної ланки.
Передавальна функція реальної диференціальної ланки
13
= 1 + 1.
Реальні диференціальні ланки є інерційними, константа часу Т1 відображає вказану інерційність, чим менша Т1, тим ближчі властивості ланки до ідеальної диференціальної. В електричних ланцюгах інерційність вноситься часом розрядження конденсатора через резистор (RC ланка).
В автоматиці поширені послідовні коригувальні пристрої виконані на RC -, RCL - ланцюгах. ПКП вводять в систему автоматичного керування як додаткові ланки, щоб отримати потрібні показники якості системи.
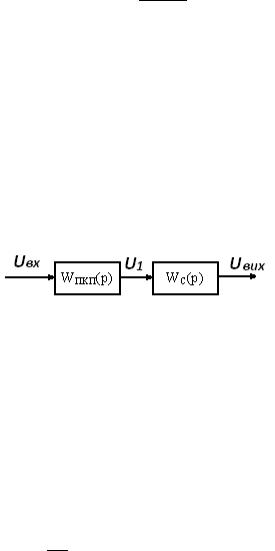
Приклад використання послідовного коригувального пристрою з передавальною функцією WПКП(p) наведено на рис. 4. На ньому в систему з передавальною функцією WС(p) подається не вхідний сигнал вх( ), а відкоригований сигнал 1( ).
Рис. 4. Схема послідовної корекції системи керування
Як видно з рисунка спосіб корекції за допомогою послідовного коригувального пристрою не вимагає складних розрахунків та найбільш простий у технічному виконанні (див. рис.1). Широкого використання ПКП набули при корекції систем, де передача інформації здійснюється сигналами постійного електричного струму. Рекомендується використовувати ПКП в системах зі стабільними параметрами. Це пов’язано з тим, що ПКП не послаблюють вплив зміни параметрів елементів системи на її показники якості.
Як відомо, комплексні опори електричної ланки з лінійними резисторами, магнітними котушками та конденсаторами записуються в такому вигляді: активний опір R; індуктивний опір
; ємнісний опір 1 .
В операторній формі, після перетворення Лапласа, при нульових початкових умовах опори елементів схеми можна
14

записати в такому вигляді: активний опір R(p) = R; індуктивний опір = ; ємнісний опір = 1 ,
де комплексна змінна = 0 + з натуральною частиною0 = 0 та уявною частиною .
Для обчислення комплексних опорів схеми (рис. 2) Zі(p) треба скористатись законом Ома для розгалужених ланцюгів. Так, для послідовного з’єднання загальний опір буде прямо
пропорційним сумі опорів |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
= |
+ |
|
|
+ |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
= + + |
1 |
. |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для паралельного з’єднання загальний опір буде зворотно |
|||||||||||||||||||||||||
пропорційним сумі електричних провідностей |
|
|
|||||||||||||||||||||||
1 |
|
|
= |
|
|
1 |
|
+ |
|
1 |
|
|
|
+ |
|
|
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
( ) |
( ) |
|
|
( ) |
|
|
( ) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
= |
|
+ |
|
+ . |
|
|
|
|
|||||||||||||
|
|
( ) |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зробимо деякі зауваження стосовно одиниць виміру параметрів, утворених різноманітним з’єднанням елементів електричної схеми, для чого нагадаємо визначення основних електричних одиниць виміру.
Ампер [А] — одиниця виміру сили електричного струму в системі СІ. Одним Ампером називається сила електричного струму, при якій через провідник проходить заряд 1 Кулон [Кл] за 1 секунду [с], А = Клс .
Електричний опір [Ом] — скалярна фізична величина, що характеризує властивості провідника і рівна відношенню електричної напруги на кінцях провідника [В] до сили
електричного струму [А], що протікає по ньому, Ом = ВА .
Фарад [Ф] — одиниця виміру електричної ємності в системі СІ, дорівнює електричній ємності конденсатора, при якій заряд
15

1 Кулон [Кл] створює між обкладинками конденсатора напругу
1 Вольт [В], Ф = КлВ = АВ∙ с = Омс .
Генрі [Гн] — одиниця виміру індуктивності в системі СІ. Ланцюг має індуктивність 1 Генрі [Гн], якщо зміна струму зі швидкістю 1 Ампер [А] за секунду [с] створює ЕДС індукції, що
дорівнює 1 Вольту [В], Гн = ВА∙ с = Ом ∙ с .
Отже, можливі форми об’єднання параметрів схем та їхні одиниці виміру запишемо в такому вигляді:
|
|
= |
Гн |
= |
Ом ∙ с |
= с , |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Ом |
|
Ом |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
∙ = Ом ∙ Ф = Ом ∙ |
|
с |
|
= с , |
|
|
|
|||||||||||||||||
|
Ом |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∙ = Гн ∙ Ф = Ом ∙ с ∙ |
|
с |
|
= с2 |
, |
|
||||||||||||||||||
|
Ом |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 2 |
= |
|
Ом2 |
= Ом . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
1+ 2 |
|
Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Розглянемо як приклад схему, наведену на рис. 1а. Візьмемо |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
= 1, |
|
|
|
|
||||||
|
|
|
|
|
|
1 |
|
|
= |
1 |
|
+ = |
2 + 1 |
|
|||||||||||
|
|
|
|
|
|
|
|
( ) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
= |
|
|
|
|
. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
+ 1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Щоб відшукати передавальну функцію, скористаємося вже відомою формулою
|
= |
|
2 |
|
|
= |
|
|
|
2 |
|
|
|
|
|
= |
|
|
|||
|
|
+ |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||
|
1 |
|
|
2 |
|
|
2 + 1 |
1 |
+ |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 |
+ 1 |
|
|
|
|
|||||||
|
|
|
|
|
= |
|
|
2 |
|
= |
|
|
|
|
|
2 |
|
. |
|||
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
1 2 |
|
||||||
|
|
|
|
|
1 |
2 |
1 |
2 |
|
|
1 + 2 |
|
|
|
+ 1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
Відповідно до табл. А.1., подамо отриманий вираз у формальному записі типової динамічної ланки, а саме аперіодичної першого порядку:
= + 1,
16
де = |
|
2 |
|
, |
коефіцієнт |
підсилення ланки, безрозмірна |
|||||
|
1 |
+ |
2 |
||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
Ом |
|
|
1 2 |
|
|||
величина, оскільки |
= од , = |
, константа часу ланки, |
|||||||||
Ом |
1+ 2 |
||||||||||
|
|
|
|
|
|
|
|
|
|||
яка визначає показники якості та впливає на фільтрівні властивості
ланки, одиниця виміру |
|
Ом2 |
∙ Ф = с . |
||||||
|
Ом |
||||||||
|
|
|
|
|
|
|
|||
Для обчислення коефіцієнтів диференціального рівняння |
|||||||||
скористаємось останнім стовпчиком табл. А.1. |
|||||||||
= |
0 |
= |
|
2 |
|
0 = 1 + 2, Ом |
|||
|
0 |
|
+ |
2 |
|||||
|
|
|
|||||||
|
|
|
1 |
|
1 = 1 2 , Ом с . |
||||
= |
1 |
= |
1 2 |
||||||
0 |
1+ 2 |
0 = 2, Ом |
|||||||
Підставляючи числові значення параметрів електричної схеми знаходимо вид передавальної функції та диференціального рівняння послідовного коригувального пристрою, який наведено на рис.1а. Аналогічно обчислюються інші схеми ПКП.
ІНДИВІДУАЛЬНЕ ЗАВДАННЯ № 2
Завдання:
побудувати перехідні характеристики в програмному математичному пакеті «СИАМ». Для побудови перехідної характеристики послідовного коригувального пристрою змоделювати вхідний сигнал з рівнем «сходинки» Uвх(t)=10В;
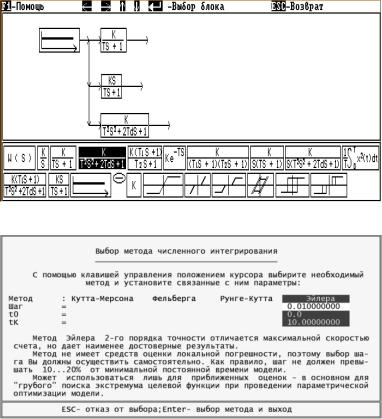
вибрати метод чисельного інтегрування згідно з варіантом завдання (табл.1). Крок інтегрування t1 вибрати рівним 0,0001с, час початку моделювання t0=0с, час закінчення моделювання tк - 1с. Графіки перехідних характеристик вивести на друк з метою подальшого опрацювання;
змінити крок інтегрування на t2=0.1с. Провести моделювання та зробити висновок щодо отриманих результатів попередніх та поточних експериментів при кроці інтегрування t1 та t2 за показником точності обчислень. Орієнтовний вид перехідних характеристик наведено в табл. А.2;
17
визначити параметри передавальних функцій коригувальних пристроїв, за отриманими графіками перехідних характеристик.
Порядок виконання завдання
Для виконання завдання № 2 пропонується використати систему автоматизованого моделювання і параметричної оптимізації «СИАМ» версії 4.3.
Система автоматизованого моделювання і параметричної оптимізації «СИАМ» працює з моделями, які можна подати у формі блок-схем. До складу її версії «СИАМ» входять 52 типових блоки, 4 методи чисельного інтегрування і 3 методи параметричної оптимізації, що дозволяє проводити з її допомогою дослідження широкого класу систем керування та інших динамічних систем. Система має чотири режими роботи: побудова моделі, моделювання, оптимізація, побудова логарифмічних частотних характеристик. Для виконання індивідуальних завдань пропонується використовувати лише два режими роботи: побудова моделі та моделювання.
Для побудови моделі пропонується така послідовність дій:
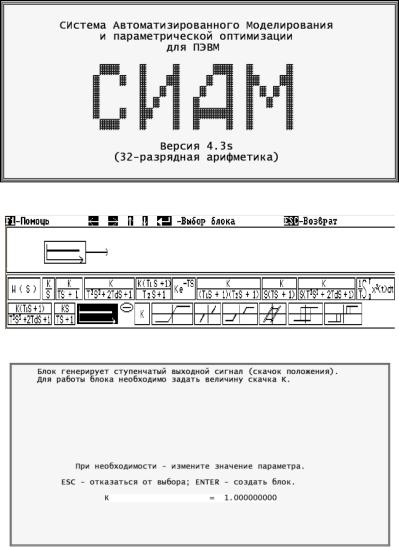
1.Завантажити програму системи автоматизованого моделювання та параметричної оптимізації «SIAM\SIAM- S.EXE». Результатом успішного запуску програми буде вікно привітання, наведене на рис. 5.
2.Задати вхідний сигнал рівний 10 В, для чого натиснути клавіші «F6-Окно», «F2-Блок». Загальний вигляд робочого вікна показано на рис. 6. Після цього вибрати блок, що моделює вказаний сигнал та натиснути клавішу «ENTER». Далі ввести необхідне значення вхідного сигналу. Вигляд вікна для введення числових параметрів для вхідного сигналу зображений на рис. 7. Задати блоки з передавальними функціями, якими описуються ПКП, отримані в завданні № 1. Блоки, що моделюють конкретні передавальні функції, вибирають за допомогою клавіш управління курсором: «», «», «», «». Зв’язки малюють натискаючи клавіші «F3-
18
Перо», редагують блоки — «F4-Ред». Загальний вигляд моделі наведено на рис. 8.
Рис. 5. Початкове вікно програми «СИАМ»
Рис. 6. Вікно системи в режимі побудови моделі
Рис. 7. Вікно для вводу числових параметрів
19
3.Побудовану модель зберегти на диску натиснувши клавішу «F5-Диск» та виконавши розпорядження програми.
Рис. 8. Вікно з моделями ПКП у вигляді структурної схеми
Рис. 9. Вікно вибору методу чисельного інтегрування
Для роботи в режимі моделювання пропонується така послідовність дій.
4.Після того як модель створена, потрібно провести моделювання роботи ланок послідовних коригувальних пристроїв при подачі на їх вхід сигналу постійної напруги рівнем 10 В. Для цього необхідно вийти в головне вікно, натиснувши клавішу «ESC» та «F7-Мод», щоб перейти в режим моделювання.
20