

Загальна фізика / Теоретичні курси / Конспект лекцій з фізики №1
.2.pdfДЕРЖАВНИЙ ЕКОНОМIКО - ТЕХНОЛОГIЧНИЙ УНIВЕРСИТЕТ ТРАНСПОРТУ
Кафедра фiзики та електротехнiки
Конспект лекцiй
ФIЗИЧНА МЕХАНIКА МОЛЕКУЛЯРНА ФIЗИКА ТЕРМОДИНАМIКА ТА ЕЛЕКТРИКА
Для студентiв технiчних спецiальностей
Київ - 2008

Конспект лекцiй з фiзичної механiки, молекулярної фiзики, термодинамiки та електрики розглянуто та затверджено на засiданнi кафедри фiзики та електротехнiки (протокол № вiд . .2008 р.) та на засiданнi методичної
комiсiї факультету "Iнфраструктура та рухомий склад залiзниць"(протокол № вiд . .2008 р.)
Конспект лекцiй з фiзичної механiки, молекулярної фiзики, термодинамiки та електрики пiдготовлено для студентiв факультету управлiння залiзничним транспортом
Укладач:
професор Барабаш Олександр Iллiч
Рецензенти: кандидат фiзико - математичних наук, доц. Грабовський Ю.Є. (Доцент кафедри радiацiйної фiзики фiзичного факультету Київського нацiонального унiверситету iменi Тараса Шевченка) та кандидат фiзико - математичних наук, доц. Ковальчук О.В. (кафедра "Фiзики i електротехнiки"КУЕТТ)
ЗМIСТ
1 Механiка |
|
6 |
|
1.1 |
Кiнематика . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
|
|
1.1.1 |
Система вiдлiку та траєкторiя . . . . . . . . . . . . . . . |
6 |
|
1.1.2 |
Прямолiнiйна траєкторiя . . . . . . . . . . . . . . . . . . |
8 |
|
1.1.3 |
Рух матерiальної точки по колу . . . . . . . . . . . . . . |
8 |
1.2 |
Динамiка . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
10 |
|
1.2.1Сила i маса в механiцi . . . . . . . . . . . . . . . . . . . . 10
1.2.2 |
Перший закон Ньютона (закон iнерцiї) . . . . . . . . . . |
10 |
1.2.3 |
Другий закон Ньютона i головне рiвняння руху . . . . . |
10 |
1.2.4Третiй закон Ньютона . . . . . . . . . . . . . . . . . . . . 11
1.2.5Сили в класичнiй механiцi . . . . . . . . . . . . . . . . . . 11
1.2.6Закон збереження iмпульсу . . . . . . . . . . . . . . . . . 12
1.2.7Робота сили . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.8Енергiя тiла . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.9Закон збереження механiчної енергiї . . . . . . . . . . . . 14
1.2.10 |
Пружна i непружна взаємодiя тiл . . . . . . . . . . . . . |
15 |
1.2.11 |
Динамiка твердого тiла . . . . . . . . . . . . . . . . . . . |
16 |
1.2.12 Закон збереження момента iмпульсу . . . . . . . . . . . . 19
1.3Статика . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.4Перетворення Галiлея
(механiчний принцип вiдносностi) . . . . . . . . . . . . . . . . . 21
1.5Механiчнi коливання . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.5.1Пружинний маятник . . . . . . . . . . . . . . . . . . . . . 25
1.5.2Фiзичний маятник . . . . . . . . . . . . . . . . . . . . . . 25
1.5.3Математичний маятник . . . . . . . . . . . . . . . . . . . 26
1.6 Одиницi вимiрювання, константи в механiцi |
. . . . . . . . . . . 26 |
2 Молекулярна фiзика i термодинамiка |
28 |
2.1Молекулярно-кiнетична теорiя
(закони iдеального газу) . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.1Iдеальний газ . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.1.2Макроскопiчнi характеристики газу . . . . . . . . . . . . 28
2.1.3Закони iдеальних газiв . . . . . . . . . . . . . . . . . . . . 29
2.1.4Основне рiвняння молекулярно-кiнетичної теорiї
iдеальних газiв . . . . . . . . . . . . . . . . . . . . . . . . 31
2.1.5Функцiя розподiлу Максвела . . . . . . . . . . . . . . . . 33
2.1.6Барометрична формула . . . . . . . . . . . . . . . . . . . 34
3
2.1.7Середнi значення числа зiткнень та довжини пробiгу
молекул газу . . . . . . . . . . . . . . . . . . . . . . . . . |
35 |
2.2 Основи термодинамiки . . . . . . . . . . . . . . . . . . . . . . . . |
36 |
2.2.1 Внутрiшня енергiя газу . . . . . . . . . . . . . . . . . . . |
36 |
2.2.2Робота газу проти зовнiшнiх сил . . . . . . . . . . . . . . 38
2.2.3Рiвняння першого начала термодинамiки . . . . . . . . . 39
2.2.4Теплоємнiсть iдеального газу . . . . . . . . . . . . . . . . 39
2.2.5Робота, що виконує газ при рiзних iзопроцесах . . . . . . 40
2.2.6Адiабатичний процес . . . . . . . . . . . . . . . . . . . . . 41
2.2.7 |
Термiчний коефiцiєнт корисної дiї . . . . . . . . . . . . . |
44 |
2.2.8 |
Ентропiя iдеального газу . . . . . . . . . . . . . . . . . . |
46 |
2.3 Одиницi вимiрювань, константи в молекулярнiй фiзицi . . . . . |
48 |
|
3 Електрика та постiйний струм |
50 |
|
3.1Електростатика . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1.1Закон збереження електричного заряду . . . . . . . . . . 50
3.1.2Закон Кулона . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1.3Електростатичне поле,
напруженiсть електростатичного поля . . . . . . . . . . . 51
3.1.4Потiк вектора напруженостi електростатичного поля . . 52
3.1.5Принцип суперпозицiї електростатичних полiв . . . . . . 52
3.1.6Теорема Остроградського-Гауса . . . . . . . . . . . . . . . 53
3.1.7Робота по перемiщенню заряду в електростатичному полi 57
3.1.8Циркуляцiя вектора напруженостi електростатичного
поля . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.1.9Потенцiальна енергiя заряду в електростатичному полi . 58
3.1.10Потенцiал електростатичного поля . . . . . . . . . . . . . 59
3.1.11Напруженiсть електростатичного поля
як градiєнт потенцiалу . . . . . . . . . . . . . . . . . . . . 60
3.1.12Еквiпотенцiальнi поверхнi, лiнiї . . . . . . . . . . . . . . . 60
3.2Електроємнiсть провiдникiв . . . . . . . . . . . . . . . . . . . . . 61
3.2.1Електроємнiсть вiдокремленого провiдника . . . . . . . . 61
3.2.2Конденсатори . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.2.3Енергiя системи нерухомих зарядiв та вiдокремленого
провiдника . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.2.4Енергiя зарядженого конденсатора та електростатично-
го поля . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.3 Постiйний електричний струм . . . . . . . . . . . . . . . . . . . |
65 |
3.3.1 Електрорушiйна сила (EPC) . . . . . . . . . . . . . . . . |
66 |
4
3.3.2Закон Ома . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.3.3 |
Температурна залежнiсть опору . . . . . . . . . . . . . . |
68 |
3.3.4 |
Закон Джоуля – Ленца . . . . . . . . . . . . . . . . . . . |
68 |
3.3.5Закон Ома для неоднорiдної дiлянки кола . . . . . . . . . 69
3.3.6Правила Кiрхгофа . . . . . . . . . . . . . . . . . . . . . . 69
3.4Одиницi вимiрювання i константи в електрицi,
постiйному струмi . . . . . . . . . . . . . . . . . . . . . . . . . . |
70 |
4 Список рекомендованої лiтератури |
71 |
5
1Механiка
1.1Кiнематика
1.1.1Система вiдлiку та траєкторiя
Матерiальною точкою (або точковою масою) в фiзицi називається тiло, розмiрами i формою якого в умовах даної задачi можна знехтувати.
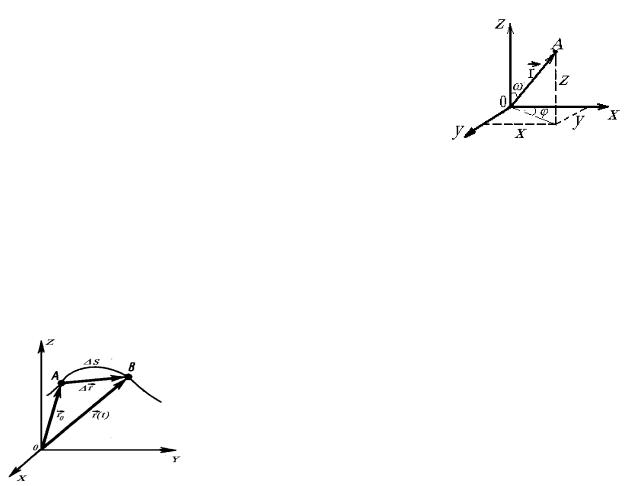
Декартова система координат складається iз трьох взаємноперпендикулярних прямих, якi проходять через задану точку тiла вiдлiку i називаються осями координат.
Розмiщення матерiальної точки у просторi задається її ортогональними проекцiями (x, y, z) на осi
координат, якi називаються координатами матерiальної точки. Радiус-вектор – це вектор ~r, який починається в початку декартової си-
стеми координат, а закiнчується там, де знаходиться матерiальна точка (точка A рис.1). Його компоненти спiвпадать з координатами матерiальної точки. Тобто
~r = (x, y, z, t). |
(1) |
В полярнiй системi координат радiус-вектор ~r
~r = (ρ, ϕ, ω, t) |
(2) |
теж залежить вiд трьох незалежних просторових змiнних (рис. 1): модуля радiус-вектора ρ = |~r|, вiдповiдно вiд азiмутального ω та полярного ϕ кутiв.
Траекторiя – це лiнiя у просторi, яку описує матерiальна точка, або до-
Рис. № 2:
вiльно обрана точка тiла при русi тiла.
Перемiщення – це вектор ~r (рис. 2), спрямований вiд початкового положення матерiальної точки, яке характеризується вектором ~r1, до певного її кiнцевого положення з радiусом ~r2. Тобто
~r = ~r21 = ~r2 − ~r1. |
(3) |
Швидкiсть матерiальної точки – це її перемiщення ~r, за одиницю часу, який має назву вектор середньої швидкостi
→ |
→ |
|
|
r |
(4) |
||
< v >= |
|
. |
|
t |
|||
6
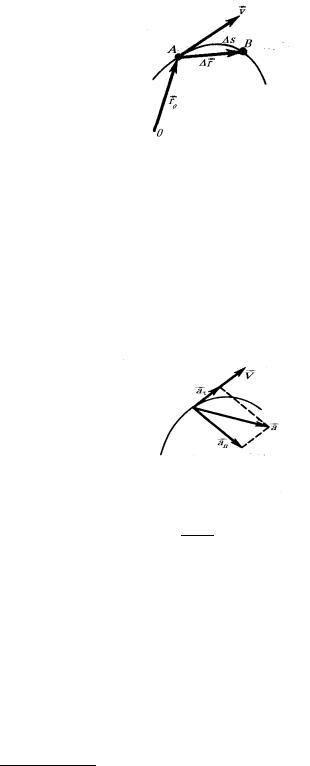
Середня (або шляхова) швидкiсть <v> нерiвномiрного руху (рис. 3) є скалярна величина
|
|
|
|
< v >= |
s |
, |
|
|
|
(5) |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
t |
|
|
|
|
||
де s є шлях, що проходить матерiально точка за час |
|
t. |
|
|||||||||
Вектор миттєвої швидкостi |
|
|
|
|
|
|
||||||
|
|
~r(t) |
|
d (~r(t)) |
|
|
|
t2 |
|
|||
( ) = |
t 0 |
≡ |
= |
( ) = |
Z |
( ) d |
(6) |
|||||
t |
dt |
|||||||||||
~v t |
lim |
|
|
|
|
|
|
~r t |
|
~v t t . |
||
|
→ |
|
|
|
|
|
|
|
t1 |
|
|
|
Вектор миттєвої швидкостi спрямований вздовж дотичної до трєкторiї в точцi (рис. 3), де в цей час знаходиться матерiальна точка (тiло).
Вектор середнього прискорення
→ |
→ |
Рис. № 3: |
|
v |
(7) |
||
< a >= |
|
. |
|
t |
|||
Вектор миттєвого прискорення
→→
→ |
t→0 |
v(t) |
≡ |
d v(t) |
= |
→ |
2 → |
|
||
( )= |
t |
dt |
( )= |
Z1 |
( ) d |
(8) |
||||
a t |
lim |
|
|
|
|
|
v t |
|
a t t . |
|
Кiнематичнi рiвняння рiвнозмiнного (a = const) поступального руху по траєкторiї довiльної форми мають вигляд
→ |
→ |
→ |
→ |
→ |
→ |
|
→ |
t |
2 |
|
|
a |
|
(9) |
|||||||
v(t)=v0 |
+ a t ; |
r(t)= r 0 |
+ v0 |
t + |
|
|
|
|||
|
|
|
||||||||
|
|
|
|
|
|
2 |
|
|
||
В скалярному виглядi, коли розглядаються проекцiї векторiв ~r, ~v та ~a на деяку обрану вiсь, наприклад, вiсь OX, рiвняння (9) будуть переписанi у виглядi
vx(t) = v0x ± axt , |
rx(t) = r0x ± v0x t ± |
axtРис2 |
. № 4: |
(10) |
2 . |
|
Вектор миттєвого прискорення ~a можна розкласти (рис. 4) на два ортогональнi вектори ~aτ та ~an, якi вiдповiдно спрямованi вздовж дотичної i перпендикулярно до прямої, яка є дотичною до траєкторii руху тiла в тiй точцi, де знаходиться тiло в даний момент часу
→ → |
→ |
(11) |
a = a |
τ + an . |
Оскiльки вектори ~aτ та ~an ортогональнi, модуль вектора миттєвого прискорення дорiвнює
q
|~a| = |~aτ |2 + |~an|2 . (12)
7
→ |
→ |
спрямована в бiк руху |
Тангенцiальна складова aτ |
вектора прискорення a |
тiла (в бiк миттєвої швидкостi), якщо рух прискорений, i в протележний бiк, якщо рух тiла сповiльнений.
→ |
|
|
|
→ |
Модуль вектора aτ |
вiдзеркалює змiну модуля вектора миттєвої швидкiстi v . |
|||
|
aτ = |
dv |
. |
(13) |
|
|
|||
|
|
dt |
|
|
→
Нормальна складова ~an вектора a спрямована перпендикулярно до дотичної до траєкторiї руху тiла у бiк центру кривини траєкторiї. Модуль вектора нормальної складової миттєвого прискорення ~an характеризує змiну орiєн-
→
тацiї вектора миттєвої швидкостi тiла v у проосторi
|
v2 |
(14) |
|
an = |
|
. |
|
|
|||
|
r |
|
|
1.1.2Прямолiнiйна траєкторiя
Увипадку прямолiнiйного руху кiнематичне рiвняння руху (9) матерiальної точки буде мати вигляд
v(t) = ± v0x ± ax t; |
x(t) = x0 ± v0x t ± |
ax t2 |
, |
2 |
|||
|
|
(15) |
|
де ± означає, що, хоча вектори перемiщення ~x, v~0 i ~a є колiнеарними, в загальному випадку можуть бути спрямованими в протилежнi сторони вздовж осi OX. Тобто кiнематичне рiвняння руху матерiальної точки по прямолiнiйнiй траєкторiї представляє проекцiю
рiвняння (9) на обрану вiсь, наприклад, вiсь OX. Причому початок вiдлiку (точка О) системи координат теж знаходиться на осi OX.
1.1.3Рух матерiальної точки по колу
→
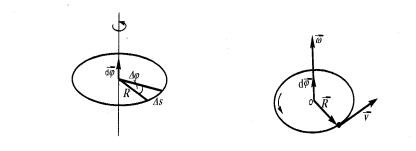
Псевдовектор кутової швидкостi ω перпендикулярний до площини кола, по якому рухається тiло (рис. 5), вздовж осi обертання. Напрям псевдовектора ~ω визначається за правилом правого гвинта:
круговий рух матерiальної точки по колу спiвпадає з напрямом обертального руху правого гвинта, тодi поступальний рух правого гвинта вкаже на напрям псевдовектора ~ω (вектор ~ω є псевдовектором
8
тому, що прикладений не до матерiальної точки або тiла).
→
Псевдовектор кутового прискорення ε , що паралельний вектору ку-
→ →
тової швидкостi ω (рис. 5), має той самий напрям, що псевдовектор ω, у випадку прискореного обертання тiла, i має протележний напрям у випадку сповiльненого руху матерiальної точки по колу
|
→ |
|
|
→ |
t |
|
t |
|
→ω= |
dω |
, |
→ε = |
d̟ |
= ~ω(t) = Z |
~ε(t) dt ; |
ω(t) = Z |
~ω(t) dt (16) |
dt |
dt |
|||||||
|
|
|
|
|
0 |
|
0 |
|
В скалярному виглядi кiнематичнi рiвняння руху тiла по колу зi сталим кутовим прискоренням (ε = const)
ω(t) = ω0 ± ε t ;
|
ε t2 |
|
|
|
|
||
ω(t) = ω0 ± ω0 t ± |
|
. |
|
|
|
|
|
2 |
|
Рис. № 5: |
|
||||
Зв’язок мiж лiнiйними R, ds, v та кутовими dω, ω величинами для колового |
|||||||
руху: |
|
|
ds |
|
dϕ |
|
|
|
ds = R dϕ ; v = |
= R |
= R ω . |
(17) |
|||
|
dt |
|
|||||
|
|
|
|
dt |
|
||
У векторному виглядi цi спiввiдношення мають бути переписанi через векторнi добутки
→ → → → → → → → → → → →
ds= dω R ; dω= R ds ; v = ω R ; ω= R v . (18)
Мiж тангенцiальною aτ i нормальною an складовими прискорення a, та лiнiйною v, кутовою ̟ швидкостями, кутовим прискоренням ε при обертаннi матерiальної точки (тiла) по колу iснують спiввiдношення
|
dv |
|
dω |
|
v2 |
|
|
aτ = |
|
= R |
|
= R ε ; an = |
|
= ω2R. |
(19) |
dt |
dt |
|
|||||
|
|
|
R |
|
|||
Перiод T повного обертання матерiальної точки (тiла) по колу можна
визначити через миттєву v i кутову ̟ швидкостi |
|
|
|
|
||||||
|
2πR |
|
2πR |
|
2π |
|
2π |
(20) |
||
v = |
|
= T = |
|
; ω = |
|
|
= T = |
|
. |
|
T |
v |
T |
ω |
|||||||
Число ν повних обертiв матерiальної точки (тiла) по колу за одиницю часу
називається частотою обертання |
|
|
|
|
|
ν = |
n |
= |
1 |
. |
(21) |
t |
|
||||
|
|
T |
|
||
9
1.2Динамiка
1.2.1Сила i маса в механiцi
→
Сила F (x, y, z) – це абстрактна векторна величина, яка характеризує дiю одного тiла, чи декiлькох тiл, на тiло, рух якого дослiджується. Сила, як век-
→
тор, має довжину (модуль вектора сили F (x, y, z)), напрям у просторi, точку
прикладання. Дiя декiлькох тiл визначається як векторна сума сил, кожна з
→
яких еквiвалентна дiї одного тiла (тобто результуюча сила R знаходиться за правилами складання векторiв).
→ |
N → |
(22) |
|
R = |
X |
Fi . |
|
|
|
|
|
i=1
1.2.2Перший закон Ньютона (закон iнерцiї)
Будь-яка матерiальна точка (тiло) зберiгає стан спокою або прямолiнiйного рiвномiрного руху (a = 0 i v = const), якщо дiя iнших тiл (сил), або сума
→ N →
сил дорiвнює нулю (R = X Fi ≡ 0) i не може змiнити цей стан. Властивiсть
i=1
тiла зберiгати стан спокою, або рiвномiрного прямолiнiйного руху називається iнертнiстю тiла. Ця властивiсть тiл пояснює iснування сил iнерцiї.
Маса тiла m – це фiзична величина (кiлькiсть речовини тiла), що характеризує його iнерцiйнi (iнертна маса) та гравiтацiйнi (гравiтацiйна маса) властивостi. Маса є мiра iнертностi тiла.
Iмпульс точкової маси, або тiла (кiлькiсть руху)
→ |
→ |
|
p |
(23) |
|
|
= m v . |
1.2.3Другий закон Ньютона i головне рiвняння руху
→
Прискорення, з яким рухається тiло, прямо пропорцiйне сумi сил R=
N ~ |
|
|
|
|
|
|
|
|
|
|
X |
Fi, якi дiють на тiло, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
→ |
|
|
|
|
|
|
|
→ |
|
|
|
|
||
|
|
|
|
|
|
R |
|
|
||
|
|
|
|
a |
= |
|
|
|
|
|
|
|
|
|
m |
|
|
||||
i обернено пропорцiйне масi тiла m |
|
|
|
|
|
|
||||
|
→ |
N |
→ |
→ |
|
d(m |
→ |
|||
|
|
|
v ) |
|||||||
|
R = |
X |
Fi = m a = |
|
|
|
|
; |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
dt |
|
|
|
|
|
|
(24) |
→ |
→ |
|
|
d p |
(25) |
||
R = |
|
. |
|
|
|||
|
dt |
|
|
Рiвняння (25) представляє головне рiвняння динамiки поступального руху точкової маси, тiла. У скалярному виглядi рiвняння (25) буде мати
10