

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ДАЛЬНЕВОСТОЧНЫЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Одобрено методической
комиссией института Председатель МК
"__"
____________200__г.
по дисциплине
МОДЕЛИРОВАНИЕ СИСТЕМ
Методические указания обсуждены на заседании кафедры КПР
"__"_________200__г.
Заведующий кафедрой ___________________Е.Л. Гамаюнов
Разработал ________________А.А. Кацурин, к.т.н.
1. Краткие теоретические сведения
В процессе выполнения курсовой работы необходимо исследовать работу системы автоматического управления двигателем постоянного тока с независимым возбуждением. Обобщенная функциональная схема системы представлена на рис. 1.1. На рисунке введены следующие обозначения:
ЗС – задатчик скорости,
ЗМ – задатчик момента нагрузки,
Р – регулятор,
ШИП – широтно-импульсный преобразователь,
ДПТ – двигатель постоянного тока.
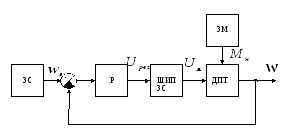
Рис. 1.1. Функциональная схема системы
Система
работает следующим образом. Задатчик
скорости ЗС формирует требуемый сигнал
скорости
![]() ,
из которого вычитается текущее значе6ние
скоростиw
двигателя постоянного тока. Полученная
разность поступает на регулятор скорости
Р, который вырабатывает требуемый сигнал
управления
,
из которого вычитается текущее значе6ние
скоростиw
двигателя постоянного тока. Полученная
разность поступает на регулятор скорости
Р, который вырабатывает требуемый сигнал
управления
![]() .
Широтно-импульсный преобразователь
ШИП обеспечивает преобразование
маломощного сигнала управления в
соответствующее ему значение напряжения
якорной цепи ДПТ
.
Широтно-импульсный преобразователь
ШИП обеспечивает преобразование
маломощного сигнала управления в
соответствующее ему значение напряжения
якорной цепи ДПТ![]() .
При этом на ДПТ воздействует момент
нагрузки
.
При этом на ДПТ воздействует момент
нагрузки![]() ,
сформированный с помощью задатчика
момента ЗМ.
,
сформированный с помощью задатчика
момента ЗМ.
2. Порядок выполнения курсовой работы
Ознакомиться с методическими указаниями к выполнению курсовой работы.
В соответствии с вариантом составить структурную схему исследуемой системы управления.
Собрать полученную структурную схему в пакете Matlab и рассчитать параметры регуляторов скорости с помощью пакета Nonlinear Control Design.
Собрать электрическую схему исследуемой системы с помощью пакета Power System Blockset.
Проанализировать работу исследуемой системы по структурной и электрической схемам.
Сделать выводы о проделанной работе.
3. Пояснения к выполнению курсовой работы
3.1. Подготовка структурной схемы системы и ее модели
Для выполнения курсовой работы необходимо сначала получить передаточные функции всех основных элементов системы: Р, ШИП, ДПТ.
Тип регулятора скорости задается в задании на курсовую работу в зависимости от варианта.
Передаточная функция широтно-импульсного преобразователя имеет вид:
![]() ,
,
где
![]() - коэффициент передачипреобразователя,
- коэффициент передачипреобразователя,
![]() - постоянная временипреобразователя.
- постоянная временипреобразователя.
В качестве ШИП в курсовой работе предполагается использовать широтно-импульсный регулятор постоянного напряжения аналогичный рассмотренному в лабораторной работе № 2 «Моделирование понижающего широтно-импульсного регулятора постоянного напряжения с помощью пакета Matlab 6.1».
Структурная схема двигателя постоянного тока независимого возбуждения представлена на рис. 3.1. Параметры двигателя можно определить, воспользовавшись методическими указаниями к выполнению лабораторной работы № 4 «Исследование двигателя постоянного тока независимого возбуждения с помощью пакета Power System Blockset».
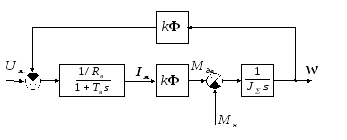
Рис. 3.1. Структурная схема двигателя постоянного тока
Далее, зная передаточные функции отдельных элементов, необходимо составить структурную схему всей системы в целом. После этого необходимо собрать полученную схему в Matlab и определить параметры регуляторов.
Определить необходимые параметры регуляторов можно, воспользовавшись методическими указаниями к выполнению лабораторной работы № 3 «Расчет параметров систем автоматического управления с помощью пакета Nonlinear Control Design». В ходе выполнения курсовой работы необходимо соблюсти следующие ограничения, накладываемые на переходную функцию:
максимальное перерегулирование - не более 5 %;
время нарастания - не более 1 с;
длительность переходного процесса - не более 3 с.
Время моделирования необходимо выбрать не более 10 с.
При этом регуляторы обязательно должны включать ограничения в соответствии с вариантом задания. Реализовать ограничение можно с помощью нелинейного блока Saturation.
Для оптимизации параметров регуляторов в качестве задающего сигнала необходимо взять единичный ступенчатый сигнал.