

УПК 62-52:629.12.06.
Довгань Н.Н., Чупина К.В. Проектирование систем автоматического управления судового электропривода: Метод. указ. к курс. проект. - Владивосток: Дальрыбвтуз, 2007.- 42 с.
Рецензент: В.Я.Молочков, к.т.н., доцент, зав. кафедрой «Электрооборудование и автоматика судов»
© Дальневосточный государственный технический рыбохозяйственный университет, 2007 г.
ВВЕДЕНИЕ
Теоретической основой для проектирования и эксплуатации систем автоматического управления (САУ) ЭП является теория автоматического управления, основные положения которой изучаются в дисциплине "Теория автоматического управления".
Основной целью учебного проектирования является развитие у студентов навыков самостоятельного творчества и способности использования теоретических знаний, полученных при изучении различных дисциплин, для реализации конкретного проекта.
Работу над проектом следует вести в следующей последовательности. На основании анализа технического задания выбираются элементы силовой части автоматизированного электропривода и разрабатывается структура его управления. Определяются математические модели всех элементов САУ, в результате чего составляется структурная схема, характеризующая динамические свойства системы. Используя структурную схему САУ, решают задачи синтеза и анализа, включающие в себя выбор типов регуляторов и расчет параметров их настройки, контроль устойчивости системы, расчет переходного процесса и определение показателей качества регулирования.
Реальные САУ являются нелинейными, однако на первом этапе исследований целесообразно осуществить линеаризацию системы. Методы исследования линейных систем достаточно хорошо отработаны и описаны в литературе. Однако, как показывает опыт руководства учебным проектированием, студенты испытывают серьезные трудности, связанные с практическим использованием положений теории автоматического управления.
В методических указаниях изложены этапы проектирования САУ судового электропривода и приведены необходимые справочные данные.
Анализ синтезированной САУ предполагается производить с использованием типовых пакетов прикладных программ.
1. Составление технического задания
Составление технического задания на проектирование является обязательной и важной частью любого технического проекта. На этапе составления технического задания решаются такие задачи, как исследование объекта управления, источника энергии, определение требований к системе управления. К ним относятся точность работы САУ как в статическом, так и в динамическом режимах, ее быстродействие, характер переходных процессов, запасы устойчивости и т.д. Эти требования сформулированы в различных нормативных документах, важнейшим из которых для судовых систем являются Правила классификации и постройки морских судов Регистра РФ.
В учебном курсовом проектировании техническое задание на проектирование выдается студенту преподавателем. Студенту необходимо его внимательно изучить и руководствоваться им в процессе выполнения проекта. Образец заполнения бланка задания на проектирование приведен в приложении 1.
2. Выбор и расчет параметров силовых элементов
АВТОМАТИЗИРОВАННОГО ЭЛЕКТРОПРИВОДА
В схемах автоматизированного электропривода можно выделить элементы, относящиеся к силовой части ЭП, и элементы, составляющие систему его управления. Структура и элементный состав силовой части определятся на основании анализа технического задания на проектирование.
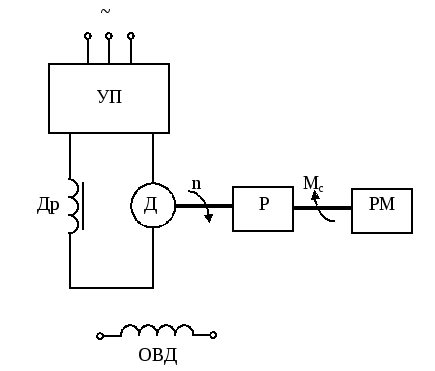
Рис. 1. Силовая часть ЭП
К силовой части ЭП (рис. 1) относятся: электродвигатель (Д) с редуктором (Р), управляемый преобразователь электрической энергии (УП), силовой трансформатор или токоограничивающий реактор, сглаживающий дроссель (Др), коммутационная аппаратура и пр. Выбор типа двигателя осуществляется по требуемой мощности, а также на основании анализа режима работы рабочего механизма (РМ) и характеристики питающей сети.
Методика выбора двигателя по указанным признакам достаточно полно описана в литературе [1, 9 и др.]. Там же имеются и технические данные на различные типы электродвигателей, часть которых приводится в Прил. 2. По каталожным данным определяется характеристики двигателя, которые потребуются на дальнейших этапах проектирования.
В курсовом проектировании по дисциплине "Теория автоматического управления" в качестве исполнительного двигателя рекомендуется использовать машину постоянного тока независимого возбуждения, для которой необходимо определить:
активное сопротивление якорной цепи:
![]() ,
,
где ![]() -
активное сопротивление якоря и
дополнительных
полюсов при температуре 20°С (П2);
-
активное сопротивление якоря и
дополнительных
полюсов при температуре 20°С (П2);
![]() =1.2
- температурный коэффициент;
=1.2
- температурный коэффициент;
коэффициент передачи (усиления) двигателя по ЭДС
![]() ,
,
где К, Ф - конструктивный коэффициент и магнитный поток двигателя;
Uд.ном. , Iд.ном. - номинальные значения напряжения и тока;
![]() =
=![]() [1/c]
-
номинальное
значение угловой скорости вращения.
[1/c]
-
номинальное
значение угловой скорости вращения.
Индуктивность якоря двигателя определяется по его техническим данным:
![]() ,
,
где Тд - электромагнитная постоянная времени, или приближенно по формуле:
![]() ,
,
где 2pn - число полюсов;
Кк - коэффициент компенсаций машины (при наличии компенсационной обмотки Кк = 0,25 - 0,3 , а при ее отсутствии - Кк = 0,4 - 0,6).
Коэффициент передачи редуктора принимается таким, чтобы при номинальной частоте вращения двигателя обеспечить верхнюю границу заданного диапазона регулирования частоты вращения вала рабочего механизма с некоторым запасом ЭП по скорости:
![]() ,
,
где
![]() -
коэффициент запаса ЭП по скорости.
-
коэффициент запаса ЭП по скорости.
Регулирование частоты вращения ЭП при переменном возмущающем воздействии, моменте сопротивления Мс, со стороны рабочего механизма для машины постоянного тока независимого возбуждения осуществляется за счет изменения напряжения на зажимах якоря, либо изменением потока возбуждения. Второй способ регулирования скорости применяется в основном в системах двухзонного регулирования, в которых регулирование в диапазоне до номинального значения осуществляется за счет изменения якорного напряжения, а выше номинального - изменением потока возбуждения.
В курсовом проекте можно ограничиться первым способом регулирования. Для его реализации необходимо выбрать управляемый преобразователь (УП). В качестве УП в судовых ЭП применяются, тиристорные преобразователи, электромашинные усилители, генераторы (система Г-Д), магнитные усилители и некоторые другие. Рекомендации по проектированию СAP с различными типами УП приведены в [1, 2, 6, 9 и др.].
В последние годы в судовых ЭП широкое распространение, благодаря своим преимуществам, получили статические преобразователи электроэнергии: тиристорные преобразователи (ТП) и широтно-импульсные преобразователи (ШИП) на тиристорах или транзисторах (для маломощных ЭП). В курсовом проекте в качестве УП рекомендуется выбрать стандартный ТП (Прил.З.).
Тиристорный преобразователь состоит из силового блока (СБ) и системы импульсно-фазового управления (СИФУ). СИФУ предназначена для формирования управляющих импульсов, открывавших тиристоры СБ в моменты времени, соответствующие величине регулирующего сигнала Up, который поступает от регулирующего блока CAP. Кроме этого на вход СИФУ подается напряжение смещения Uсм, определяющего начальный угол естественного открывания тиристоров.
Если для работы рабочего механизма необходим реверсивный ТП, то в нем используются два силовых блока: СБ - "вперед" и СБ - "назад", переключение которых осуществляется специальным логическим устройством [l].
Выбор ТП (Прил. 3) осуществляется из условия:
![]() ,
,
где
![]() - минимальная мощность УП;
- минимальная мощность УП;
Рд, ηд - мощность и КПД двигателя.
Подключение ТП к питающей сети осуществляется через силовой трансформатор (СТ) или напрямую через токоограничивающий реактор (ТОР) (рис.3.).
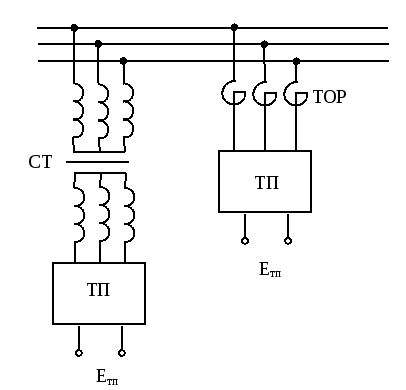
Рис. 3. Схема подключения ТП
Если линейные напряжения ТП и сети не равны, то необходим СТ, для которого линейное напряжение вторичной обмотки должно отвечать условию:
![]()
где Ксх - коэффициент схемы,
а требуемая мощность
![]() ,
,
где
![]() - номинальная мощность ТП;
- номинальная мощность ТП;
Кст - коэффициент использования СТ по мощности;
Uтп.н, Iтп.н - номинальное выпрямленное напряжение и ток ТП.
В судовых системах, главным образом, используется ТП c трехфазной мостовой схемой выпрямления, имеющей следующие характеристики [3]:
Ксх = 2,34; Кст = 1,045;
Lст = 2Lст.ф - индуктивность СТ,
Rст = 2Rст.ф - активное сопротивление СТ,
q* = 2 - число одновременно проводящих тиристоров.
m = 6 - число пульсаций выпрямленного напряжения за период питающей сети,
Lтор = 2Lтор.ф - индуктивность ТОР (при питании ТП непосредственно от сети),
Rтор = 2Rтор.ф - активное сопротивление ТОР.
Технические данные на некоторые типы СТ и ТОР приведены в Прил.4 и Прил.5.
Активное сопротивление фазы СТ определяется:
![]() ,
,
ΔРкз - потери короткого замыкания СТ (Прил.З.);
![]() -
номинальный ток фазы вторичной
обмотки СТ;
-
номинальный ток фазы вторичной
обмотки СТ;
![]() -
номинальное фазное напряжение вторичной
обмотки;
-
номинальное фазное напряжение вторичной
обмотки;
Sн, кВА - номинальная мощность СТ.
Полное активное сопротивление ТП:
![]() ,
,
где
![]() -
динамическое сопротивление;
-
динамическое сопротивление;
Uт = (0,5 – 1), В - падение напряжения на тиристоре;
Iт
-
среднее значение тока тиристора
выпрямительной
схемы (для трехфазной мостовой схемы
![]() );
);
Id.н. - номинальное значение среднего выпрямленного тока, следует принять равным номинальному току двигателя);
![]() -
коммутационное
сопротивление
выпрямительной схемы
ТП;
-
коммутационное
сопротивление
выпрямительной схемы
ТП;
f - частота питавшей сети.
Индуктивность фазы СТ, приведенная ко вторичной обмотке:
![]() ,
,
где
![]() - индуктивное сопротивление фазы СТ;
- индуктивное сопротивление фазы СТ;
![]() -
полное сопротивление фазы СТ;
-
полное сопротивление фазы СТ;
Uкз, % - напряжение к.з. СТ (Прил. 4).
Для
расчета коэффициента передачи ТП – Ктп
- необходимо построить его регулировочную
характеристику Uтп=f(Uр),
используя
регулировочные характеристики СИФУ
![]() (Прил.
3):
(Прил.
3):
![]()
где Uтп н - номинальное выпрямленное напряжение ТП (Прил. 3).
На графике Uтп=f(Uр) определяются две рабочие точки, соответствующие границам заданного диапазона регулирования ω1 и ω2:
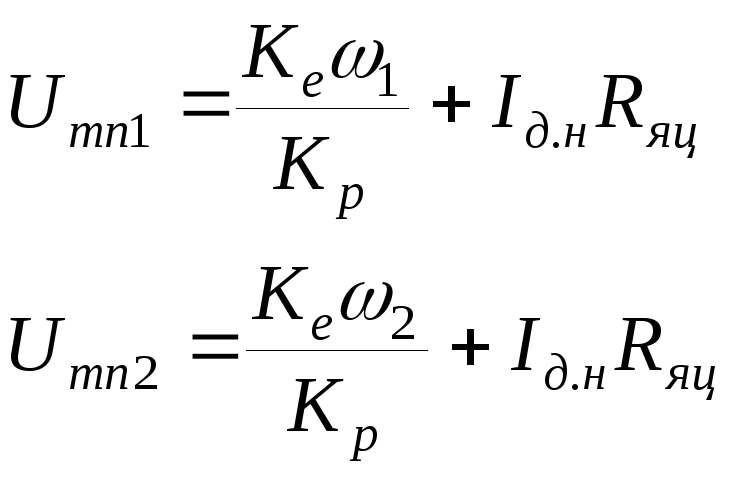 ,
,
где
![]() -
полное сопротивление якорной цепи;
-
полное сопротивление якорной цепи;
Rдр - сопротивление сглаживающего дросселя.
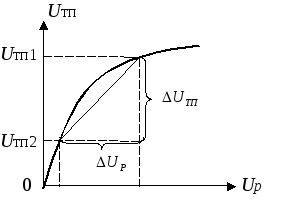
Рис.4. Построение регулировочной характеристики ТП Uтп (Up)
Проверка на необходимость сглаживающего дросселя в якорной цепи будет сделана ниже, поэтому на данном этапе расчета можно приближенно принять:
![]()
где ΔUдр=(0.005 – 0.01)Uдн - падение напряжения на дросселе.
Из рис. 4 видно, что регулировочная характеристика TП нелинейна в рабочем диапазоне. Линеаризуя ее методом хорд, определим усредненный коэффициент передачи ТП:
![]() .
.
При
работе тиристорного ЭП иногда бывает
необходима установка в якорной цепи
сглаживающего дросселя (Др). Необходимость
в дросселе возникает на малых частотах
регулирования, когда в результате
больших значений угла управляющих
импульсов
![]() в якорной цепи может возникнуть режим
прерывистых токов. При этом, если
собственная индуктивность якоря
двигателя оказывается недостаточной,
в работе рабочего механизма могут
возникнуть пульсации, а бортовая сеть
"засоряется" высокочастотными
гармониками. С целью устранения этого
нежелательного эффекта необходима
проверка на требуемую индуктивность
якорной цепи Lя.pacч.,
которая рассчитывается по условию
допустимости пульсаций тока машины:
в якорной цепи может возникнуть режим
прерывистых токов. При этом, если
собственная индуктивность якоря
двигателя оказывается недостаточной,
в работе рабочего механизма могут
возникнуть пульсации, а бортовая сеть
"засоряется" высокочастотными
гармониками. С целью устранения этого
нежелательного эффекта необходима
проверка на требуемую индуктивность
якорной цепи Lя.pacч.,
которая рассчитывается по условию
допустимости пульсаций тока машины:
![]() ,
,
где
eе
-
относительная
величина эффективного значения первой
гармоники выпрямленного напряжения,
определяемая по графику (рис. 5) для
![]() (рис. 4);
(рис. 4);
ie - относительная величина эффективного значения первой гармоники выпрямленного тока (для двигателей серии П можно принять iе = 0,02);
![]() -
угловая частота пульсаций.
-
угловая частота пульсаций.
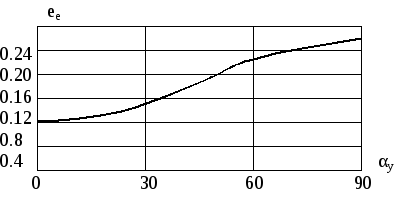
Рис.
5. График зависимости ее(![]() )
)
Условие необходимости дросселя:
![]() ,
,
где
![]() - индуктивность якорной цепи ТП-Д без
учета дросселя.
- индуктивность якорной цепи ТП-Д без
учета дросселя.
Если неравенство выполняется, то необходимо выбрать дроссель (Прил. 5) с индуктивностью:
![]()
и номинальным током:
![]() .
.
В заключении следует перечислить все выбранные элементы силовой цепи с указанием их типов и основных параметров, составить принципиальную схему силовой части ЭП, а также определить результирующие значения активного сопротивления якорной цепи ЭП
![]() ,
,
и индуктивности якорной цепи
![]() ,
,
где Rдр, Lдр - параметры выбранного дросселя (Прил. 6).