

Matematicheskoe_modelirovanie
.docxМатематическое моделирование электромеханических процессов в асинхронном тяговом приводе тепловоза ТЭМ21
Разработка тепловозов с асинхронным тяговым приводом является перспективным направлением развития локомотивостроения. Надежность новых локомотивов с асинхронными двигателями определяется прежде всего нормальным функционированием асинхронного тягового привода (АТП). Поэтому необходимо на стадии проектирования исследовать динамические процессы в приводе как в обычных, так и в нештатных режимах работы. Исследование целесообразно вести на основе компьютерного моделирования.
Чтобы выявить наиболее существенные явления, происходящие в тяговом электроприводе, необходимо моделировать его как единую электромеханическую систему. При этом в модель следует включить силовую электрическую схему, механическую часть привода с учетом сил сцепления и систему управления вентилями статических преобразователей силовой схемы.
В настоящее время ряд отечественных предприятий проводят работы по внедрению АТП. В частности, Брянским машиностроительным заводом совместно с Всероссийским научно-исследовательским и конструкторско-технологическим институтом подвижного состава создан опытный маневровый тепловоз ТЭМ21 с асинхронными тяговыми двигателями.
Силовая электрическая схема АТП четырехосного тепловоза ТЭМ21 включает источник питания (дизель-генераторную установку) и два тяговых статических преобразователя, к каждому из которых подключены параллельно по два асинхронных двигателя с короткозамкнутым ротором (АД). Механическая часть привода содержит две двухосные тележки с опорно-осевым подвешиванием АД, тяговое усилие которых передается через контакт колесо — рельс на локомотив. Система управления на основе введения регуляторов тока и потокосцепления реализует поддержание постоянства модуля вектора потокосцепления ротора АД при заданном токе статора.
Понятно, что при детальном учете всех элементов перечисленных трех подсистем привода модель получается весьма усложненной и громоздкой. Поэтому на систему АТП при моделировании были наложены ограничения, позволяющие ее существенно упростить, но в то же время дающие возможность учесть основные аспекты взаимодействия и взаимовлияния электрической, механической и управляющей подсистем привода в нормальных и аварийных режимах работы.
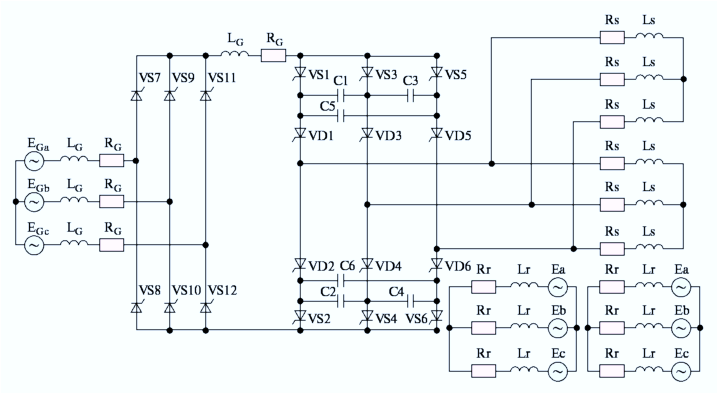
При представлении АД на основе обобщенной машины в процессе моделирования электрической подсистемы рассматривалась силовая схема одной тележки. В нее входят (рис. 1): синхронный генератор, представленный источником трехфазного напряжения с фазными ЭДС EGa, EGb, EGc и заданными внутренними активными сопротивлениями RG и индуктивностями LG; трехфазный управляемый мостовой выпрямитель, индуктивный фильтр Ld – Rd. Далее в схему включены автономный инвертор тока (АИТ) с отсекающими диодами и конденсаторной коммутацией обычных тиристоров и два параллельно соединенных АД двухосной тележки, каждый из которых представлен в неподвижной системе координат на основе трехфазной обобщенной машины тремя обмотками на статоре и тремя индуктивно связанными со статором обмотками на короткозамкнутом роторе (индуктивная связь не показана), в фазы которого введены ЭДС вращения. Последовательно с коммутирующими конденсаторами АИТ включены активные сопротивления потерь (0,02 Ом) [1], не показанные на схеме.
|
|
|
Рис. 1. Расчетная схема силовой электрической части АТП тепловоза ТЭМ21 при представлении АД на основе обобщенной машины |
На
тепловозе ТЭМ21 с АИТ установлены
асинхронные тяговые двигатели ДАТ-305
(Рн =
305 кВт, fн =
16,3 Гц, Uфн =
390 В, Мн =
9316 Н·м) со следующими параметрами
Т-образной схемы замещения: Rs =
0,068 Ом, Lss =
0,71 мГн, Lm =24
мГн, ![]() =
0,051 Ом,
=
0,051 Ом, ![]() =
0,57 мГн. Прорабатываются также варианты
использования схемы с автономными
инверторами напряжения (АИН) на
IGBT-транзисторах для индивидуального
питания двигателей каждой оси.
=
0,57 мГн. Прорабатываются также варианты
использования схемы с автономными
инверторами напряжения (АИН) на
IGBT-транзисторах для индивидуального
питания двигателей каждой оси.
Чтобы обеспечить возможность моделирования приводов локомотивов с различными силовыми преобразователями, математическая модель должна предусматривать изменение топологии схемы, что удобно реализовать на основе контурных топологических уравнений в матричной форме [2]. Такой подход позволяет включить двигатель в схему силовой электрической части привода, представив его в виде электрически и индуктивно связанных между собой ветвей. При необходимости повышения точности расчета, учета двусторонней зубчатости сердечников АД возможно представление двигателя на основе метода проводимостей зубцовых контуров [2].
Топология схемы при моделировании задается блочной топологической контурной матрицей ||B||, составляемой на основе графа и позволяющей рационально формировать систему уравнений для любой электрической части привода на базе уравнения электрического равновесия,
|
||B|| · ||uB|| = 0, |
(1) |
где ||uB|| — матрица напряжений на концах обобщенной ветви схемы, содержащей источник напряжения eB, индуктивность LВ, емкость СВ и активное сопротивление rВ. Индуктивности, активные сопротивления ветвей и напряжения на конденсаторах объединены в соответствующие матрицы. Напряжения на конденсаторах определяются из отдельных дифференциальных уравнений, чтобы в системе для индуктивных контуров уравнения имели первый порядок.
После преобразований уравнения (1) получаем систему дифференциальных уравнений электрической части АТП [2] для индуктивных контуров (контуров, содержащих индуктивные элементы), из которой определяются контурные токи и далее по ним токи всех ветвей схемы.
Работа полупроводниковых вентилей моделируется изменением матрицы сопротивлений ветвей по определенному закону в соответствии с алгоритмом управления. Вольт-амперная характеристика открытого вентиля аппроксимируется двумя прямыми, учитывающими пороговое напряжение и динамическое сопротивление [3]. В закрытом состоянии вентиль моделируется большим сопротивлением. Приняты также следующие допущения:
-
отпирание вентилей происходит мгновенно при наличии соответствующего сигнала управления и прямом напряжении на вентиле, превышающем пороговое;
-
запирание вентилей происходит мгновенно;
-
запирание полностью управляемых вентилей происходит при наличии запирающего сигнала, а полууправляемых — при наличии через них обратного тока, причем если время воздействия обратного тока меньше времени выключения вентиля, то он открывается вновь.
Параметры схемы замещения для проводящего и непроводящего состояния и время выключения вентилей берутся в соответствии со справочными данными.
При представлении АД на основе обобщенной машины в фазы ротора, моделируемого неподвижными относительно статора обмотками, вводятся ЭДС вращения (см. рис. 1)
|
|
|
|
|
|
|
|
|
где 2a, 2b, 2c — приведенные значения потокосцепления соответствующих обмоток ротора; wp–о — угловая электрическая скорость ротора соответствующего АД относительно остова, определяемая на основе решения уравнений математической модели механической подсистемы привода; р — число пар полюсов двигателя.
Электромагнитный момент АД, являющийся выходным параметром для электрической и входным для механической подсистемы привода, определяется через токи фаз двигателя по традиционной методике:
|
|
(2) |
где Lm — взаимная индуктивность между обмотками статора и ротора с учетом насыщения магнитной цепи; Isa, Isb, Isc,Ira, Irb, Irc — токи соответствующих фаз обмотки статора и приведенные к статору токи ветвей ротора.
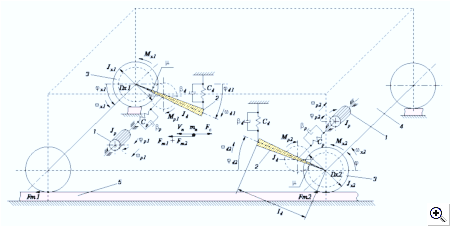
Чтобы выявить взаимовлияние процессов в электрической и механической подсистемах (частях) тягового привода, необходимо при составлении модели механической части прежде всего учесть крутильные колебания ротора двигателя, угловая скорость которого относительно остова входит в уравнения электрической подсистемы. Это позволяет сделать упрощенная расчетная схема механической части АТП (рис. 2), составленная с использованием результатов работ [4, 5]. В схему включены два колесно-моторных блока тележки, каждый из которых содержит ротор, остов и колесную пару. Тяговое усилие от колесных пар передается через контакт колесо — рельс на локомотив (и поезд). Модель учитывает только угловые колебания системы в продольной вертикальной плоскости по отношению к оси пути, которые существенно влияют на электромагнитные процессы в двигателе.
|
|
|
Рис. 2. Расчетная схема механической части АТП тепловоза ТЭМ21 с опорно-осевым подвешиванием АД: 1 — ротор АД; 2 — остов АД; 3 — колесная пара; 4 — локомотив и поезд; 5 — рельсовый путь |
Расчетной схеме (см. рис. 2) соответствует система уравнений, полученная на основе принципа Даламбера с учетом планетарного механизма тяговой передачи:
|
|
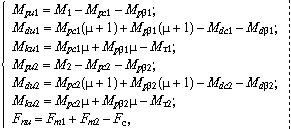
где Мрu1 и Мрu2, Мрс1 и Мрс2, Мрb1 и Мрb2 — моменты, приложенные к роторам первого (АД1) и второго (АД2) двигателей тележки от инерционных, упругих и диссипативных сил соответственно; Мdu1 и Мdu2, Мdс1 и Мdс2, Мdb1 и Мdb2— моменты, приложенные к остовам АД1 и АД2 от инерционных, упругих и диссипативных сил соответственно; Мku1 и Мku2— моменты инерционных сил колесных пар, связанных с АД1 и АД2 соответственно; Мт1 и Мт2 — тяговые моменты в контактах колесо — рельс колесных пар, связанных с АД1 и АД2 соответственно; М1 и М2 — электромагнитные моменты, приложенные к роторам АД1 и АД2 соответственно; Fnu — инерционная сила, действующая на поезд; Fm1 и Fm2 — тяговые усилия в контактах колесо — рельс колесных пар, связанных с АД1 и АД2 соответственно; Fс — сила сопротивления движению поезда.
|
Страница (из 3): |
1 |
2 |
3 |
© «Вестник ВНИИЖТ», 2002
Соответствие определяется также через параметры расчетной схемы механической части АТП и ее координаты:
|
|

где Jp — момент инерции ротора относительно своей оси вращения; Сp — угловая жесткость связи ротора с малой шестерней; bp — коэффициент вязкого трения вала ротора; wр1 и wр2 — угловые скорости роторов первого и второго двигателей соответственно; Jd — момент инерции остова двигателя, приведенный к оси колесной пары; Сd — жесткость подвески двигателя; bd — коэффициент вязкого трения подвески остова двигателя; ld — база подвески двигателя; wd1 и wd2 — угловые скорости остовов первого и второго двигателей соответственно; Jk1 и Jk2 — моменты инерции колесных пар, связанных с АД1 и АД2 соответственно, относительно собственных осей вращения; wk1 и wk2— угловые скорости колесных пар, связанных с первым и вторым двигателями соответственно; mn — масса локомотива и поезда, приходящаяся на одну тележку; Vп — скорость локомотива и поезда.
Электромагнитные моменты М1 и М2, действующие на роторы двигателей, рассчитываются по формуле (2) для каждого двигателя.
Механическая угловая скорость ротора каждого АД относительно остова, входящая в уравнения модели силовой электрической части, определяется как
|
wp – о = 2wp – (m + 1)wd – mwk. |
Сила тяги и тяговый момент вычисляются через сцепной вес и коэффициент сцепления. Продольное проскальзывание колес моделируется на основе нелинейной характеристики сцепления, которая задается по точкам с интерполяцией промежуточных значений при помощи кубической сплайн-функции.
Значения потенциального коэффициента сцепления 0 в зависимости от скорости движения также задаются таблично с интерполяцией в промежуточных точках. Для моделирования влияния остальных факторов (например, наезд на масляное пятно, подсыпка песка) 0 можно варьировать.
Система управления, реализованная на тепловозе ТЭМ21, в которой поддерживается постоянным модуль вектора потокосцепления ротора при заданном токе статора, моделируется в виде законов управления на основе введения соответствующих регуляторов. Применены пропорционально-интегральные (ПИ) регуляторы тока и потокосцепления, функционирование которых учитывается при моделировании. В зависимости от позиции контроллера машиниста и задания на момент системой управления вырабатываются задания на входной ток инвертора и потокосцепление ротора. Входной ток инвертора Id регулируется путем изменения угла управления выпрямителя
|
|
где
a — угол управления выпрямителя; ![]() —
измеренное и заданное значение входного
тока соответственно;ka —
коэффициент усиления пропорционального
звена регулятора тока; Ta —
постоянная времени интегрального звена
регулятора тока.
—
измеренное и заданное значение входного
тока соответственно;ka —
коэффициент усиления пропорционального
звена регулятора тока; Ta —
постоянная времени интегрального звена
регулятора тока.
В рассматриваемой системе автоматического управления использован метод косвенного определения потокосцепления ротора 2 [6]. Этот метод основан на идентификации переменной 2 по измеряемым фазным токам и напряжениям в соответствии с выражением
|
|
(3) |
В
формуле (3) подынтегральное выражение
есть ЭДС, наводимая в статоре полем
ротора (далее ЭДС ротора ![]() ).
).
Заданное и измеренное значения потокосцепления сравниваются, и по их рассогласованию регулятором потока вырабатывается частота скольжения ротора
|
|
(4) |
где k —
коэффициент усиления пропорционального
звена регулятора потока; T —
постоянная времени интегрального звена
регулятора потока; ![]() —
измеренное и заданное значение
потокосцепления ротора соответственно.
—
измеренное и заданное значение
потокосцепления ротора соответственно.
Для
вычисления потокосцепления ротора
необходима операция интегрирования,
которая требует значительного времени
на вычисления. Это вносит дополнительную
погрешность в вычисления, которая
начинает сказываться на скорости выше
10 км/ч. Поэтому при скорости выше 10 км/ч
для вычислений целесообразно использовать
вектор ЭДС ротора ![]() который
при 2 =
const может удовлетворительно заменить
вектор потокосцепления [6].
который
при 2 =
const может удовлетворительно заменить
вектор потокосцепления [6].
Регулятор ЭДС ротора моделируется функцией, аналогичной (4), которая определяет частоту абсолютного скольжения f2.
Частота тока статора f1 вычисляется путем алгебраического суммирования частоты вращения ротора fвр (в режиме тяги управление ведется по двигателю с меньшей частотой вращения) и частоты скольжения:
|
f1 = fвр ± f2. |
|
На величину угла a и частоты f1 накладываются необходимые ограничения.
Таким образом, реализована замкнутая система управления при питании АД от АИТ. Закон управления тиристорами АИТ — 120-градусный. Широтно-импульсная модуляция тока в начале пуска не моделируется, поэтому во избежание срыва сцепления в начале пускового режима приходится ограничивать значение пускового момента.
Для компьютерного моделирования системы АТП в соответствии с изложенным математическим описанием разработан программный комплекс в среде Delphi 6.0 [7]. Адекватность модели АТП была проверена путем сравнения результатов моделирования с осциллограммами [2], полученными на экспериментальной установке. Максимальная погрешность моделирования составляет 19 %.
Разработанная математическая модель позволяет исследовать динамические процессы в тяговом электроприводе тепловоза ТЭМ21 в нормальных и различных нештатных режимах. Наиболее вероятными и наименее изученными являются отказы в автономном инверторе [1] в результате повреждения или несвоевременного включения (выключения) вентилей, так как этот узел еще недостаточно отработан в системе тягового электропривода.
Наличие в модели всех ветвей силовой схемы инвертора (см. рис. 1) дает возможность моделировать отказ в любой ветви, в частности потерю запирающих свойств любым вентилем схемы (или несколькими вентилями одновременно). При этом возможны варианты моделирования отказов и при работающих регуляторах и системах защиты, и при отключенных. В столь сложной нелинейной системе, какой является АТП, логично исследовать поочередно влияние каждого фактора, а далее рассмотреть различные варианты их сочетания. В данном случае при моделировании отказов в АИТ принято, что защита по управляющему электроду выпрямителя отключена, регуляторы тока и частоты работают в соответствии с алгоритмами, заданными до аварии, защита от боксования отключена.
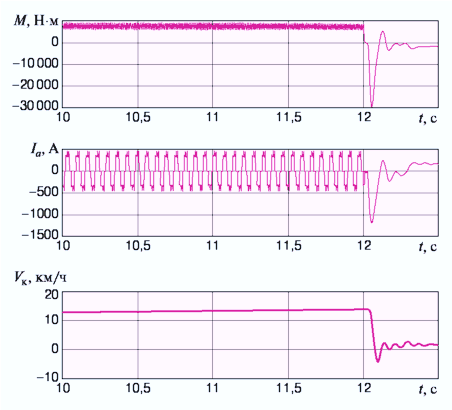
Рассмотрим отказ тиристора. Повреждение тиристора может произойти как в период его проводимости, так и при закрытом состоянии. На рис. 3 представлены результаты моделирования пробоя тиристора VS1 в период его проводимости. На указанных и последующих графиках: М, Мр, Мd — моменты электромагнитный, на валу ротора и в подвеске остова двигателя АД1 соответственно; Ia — ток фазы А двигателя АД1; IVS1...IVS6 — токи тиристоров VS1...VS6 соответственно; IVD1 — ток отсекающего диода VD1; Vк — скорость колесной пары, связанной с АД1; Vп— скорость поезда; wр-о — скорость ротора относительно остова двигателя АД1. Результаты расчета приведены для наиболее нагруженного двигателя тележки. Рассмотренные нарушения работы инвертора вызывают искажения фазных токов АД и пульсации электромагнитного момента с частотой тока инвертора. Пульсации лежат преимущественно в положительной области, амплитуда пульсаций не превышает номинального значения момента. Колебания электромагнитного момента приводят к колебаниям в механической части АТП. Для принятой модели механической подсистемы имеются две резонансные частоты: 11 и 49 Гц. Максимальные динамические моменты в элементах механической передачи наблюдаются в зоне нижнего резонанса и превышают значения номинального режима не более чем в 1,5 раза. Такое резонансное усиление возможно, разумеется, лишь при неработающей защите по управляющему электроду выпрямителя. Срабатывание защиты прервало бы колебания тока и электромагнитного момента.
|
|
|
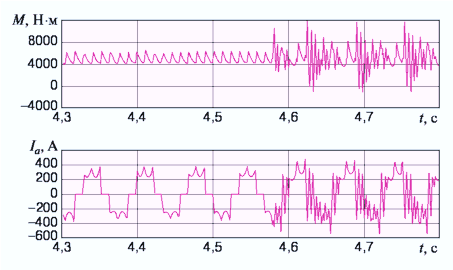
Рис. 4. Результаты моделирования тиристоров VS1 и VS2 в процессе пуска тепловоза ТЭМ21, скорость тепловоза в момент аварии 13,7 км/ч |
При одновременном пробое тиристоров VS1, VS2 в период проводимости одного из них, помимо замыкания источника питания, наблюдается двухфазное КЗ асинхронного двигателя, сопровождающееся ударным тормозным электромагнитным моментом, срывом сцепления и резким торможением ротора и колесной пары (рис. 4).
|
|
|
Рис. 5. Результаты моделирования пробоя отсекающего диода VD1 в процессе пуска тепловоза ТЭМ21, скорость тепловоза в момент аварии 13,2 км/ч |
На рис. 5, 6 представлены результаты моделирования пробоя отсекающего диода VD1 фазы А. Пробой отсекающего диода приводит к возникновению колебаний тока в контуре коммутирующих конденсаторов, которые оказываются подключенными параллельно фазам двигателя. Это вызывает соответствующие колебания фазных токов и электромагнитного момента (см. рис. 5). Электромагнитные нагрузки не превышают при этом 1,65 номинальных.
|
|
|
Рис. 6. Результаты моделирования пробоя отсекающего диода VD1 в процессе пуска тепловоза ТЭМ21, скорость тепловоза в момент аварии 6,3 км/ч |
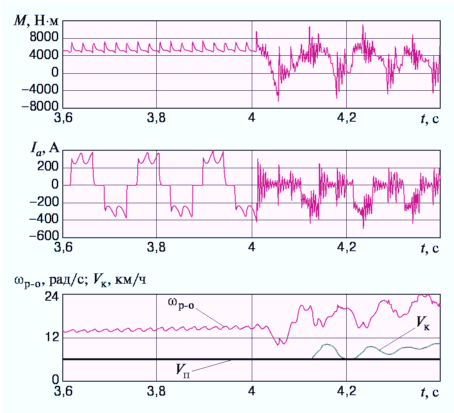
В ряде случаев электромагнитные явления, возникающие при пробое VD1, приводят к пропуску включения тиристора VS1 (см. рис. 6) на фоне пробоя диода, что сопровождается значительным искажением токов фаз АД. При этом возникают как положительные, так и отрицательные пульсации электромагнитного момента, приводящие к пульсирующим нагрузкам в элементах механической передачи. В зоне нижнего резонанса это вызывает срыв сцепления и боксование колесной пары (см. рис. 6).
Представленная модель АТП позволяет продолжить исследование нештатных режимов в инверторе при отказах вентилей в различных сочетаниях и отключении регуляторов, а также проводить исследование режимов электрического торможения и нестационарных режимов при срыве сцепления.
Выводы. 1. Разработанная математическая модель асинхронного тягового привода тепловоза ТЭМ21 позволяет анализировать динамические процессы в приводе при нормальных и аварийных режимах в единой электромеханической постановке.
2. С использованием представленной модели выполнен качественный и количественный анализ динамики нештатных режимов в тяговом приводе тепловоза ТЭМ21, вызываемых отказами вентилей инвертора тока при несрабатывании защиты по управляющему электроду выпрямителя и функционировании регуляторов в соответствии с алгоритмами, заданными до аварии.
3. Анализ показал: пробой одного тиристора АИТ при работающих регуляторах вызывает пульсации электромагнитного момента двигателя с частотой инвертирования и не приводит к значительным ударным динамическим нагрузкам: максимальные токи фаз АД не превышают номинальных более чем в 2,7 раза, динамические нагрузки в механической передаче не превосходят полутора номинальных значений;
-
одновременный пробой тиристоров анодной и катодной групп одной из фаз АИТ вызывает наряду с замыканием источника питания двухфазное КЗ асинхронного двигателя, сопровождающееся ударным тормозным электромагнитным моментом до 3,5 номинального, срывом сцепления и резким торможением ротора и колесной пары. Максимальные токи фаз двигателя составляют 3,8 номинального тока АД, максимальные ударные моменты в элементах механической передачи достигают 2,5 номинальных значений, наибольшие динамические нагрузки наблюдаются в подвеске остова АД;
-
пробой отсекающего диода приводит к колебаниям электромагнитного момента асинхронного двигателя. В частотном спектре момента присутствуют две основные составляющие: 1) пульсации с частотой инвертированияf1; 2) пульсации с частотой около 250 Гц, обусловленные токами, протекающими через коммутирующие емкости и фазы двигателя. Максимальные токи фаз двигателя составляют 2,8 номинального тока АД. Максимальный динамический момент на валу ротора не превышает 1,5 номинального значения. Увеличение момента на валу ротора при аварии в процессе пуска в нижней резонансной зоне (11 Гц) приводит к срыву сцепления и боксованию колесных пар. Максимальный динамический момент в подвеске остова достигает 1,8 номинального значения.
Список литературы
1. Электроподвижной состав с асинхронными тяговыми двигателями / Под ред. Н. А. Ротанова. М.: Транспорт, 1991. 336 с.
2. Михальченко Г. С., Федяева Г. А., Власов А. И. Моделирование переходных режимов в асинхронном тяговом приводе локомотивов // Вестник ВНИИЖТ. 2003. № 4. С. 42...47.
3. Моделирование электромеханической системы электровоза с асинхронным тяговым приводом / Ю. А. Бахвалов, А. А. Зарифьян, В. Н. Кашников, П. Г. Колпахчьян, Е. М. Плохов, В. П. Янов; под ред. Е. М. Плохова. М.: Транспорт, 2001. 286 с.