

Лабораторна робота №2 вивчення системи керування робото-технолопчним комплексом
Мета роботи
Вивчити систему керування і роботу робото-технологічного комплексу (РТК) для передачі і переорієнтування деталей із магазину в лоток плоскошліфувального верстата; засвоїти методику програмування і одержати практичні навички в настроюванні РТК па задану програму роботи.
Обладнання і прилади
РТК для передачі і переорієнтування деталей із магазину в лоток плоскошліфувального верстата.
Комплект деталей типу втулок.
І Склад і робота РТК
До РТК (рис 2.1) входять наступні вузли: робот МП-9С 1, який з’єднується кабелями 11 з ЕСПП-6030 (електронним цифровим програмним пристроєм) і пультом управління 8, змонтованих в єдиному корпусі, трубчастий магазин 4 з деталями 3, переорієнтуючий пристрій 5, лоток б, установлений під нахилом до горизонту, приймальний магазин 7, який імітує стіл плоскошліфувального верстата, вузол підготовки і подачі стисненого повітря, який включає очисник повітря 9, регулятор тиску повітря 10, лубрикатор 11.
Система керування РКТ згідно класифікації систем за принципом керування є комбінованою. Вона включає циклову частину системи, представлену числовим програмоносієм і рефлекторну, в якій використовуються датчики зворотного зв'язку (геркони). Щ, датчики розміщені в кінцевих положеннях виконавчих робочих вузлів робота МП-9С.
Команди згідно з програмою виконуються в тому разі, якщо є сигнали зворотного зв'язку від датчиків, тобто сигнали про виконання попередніх команд.
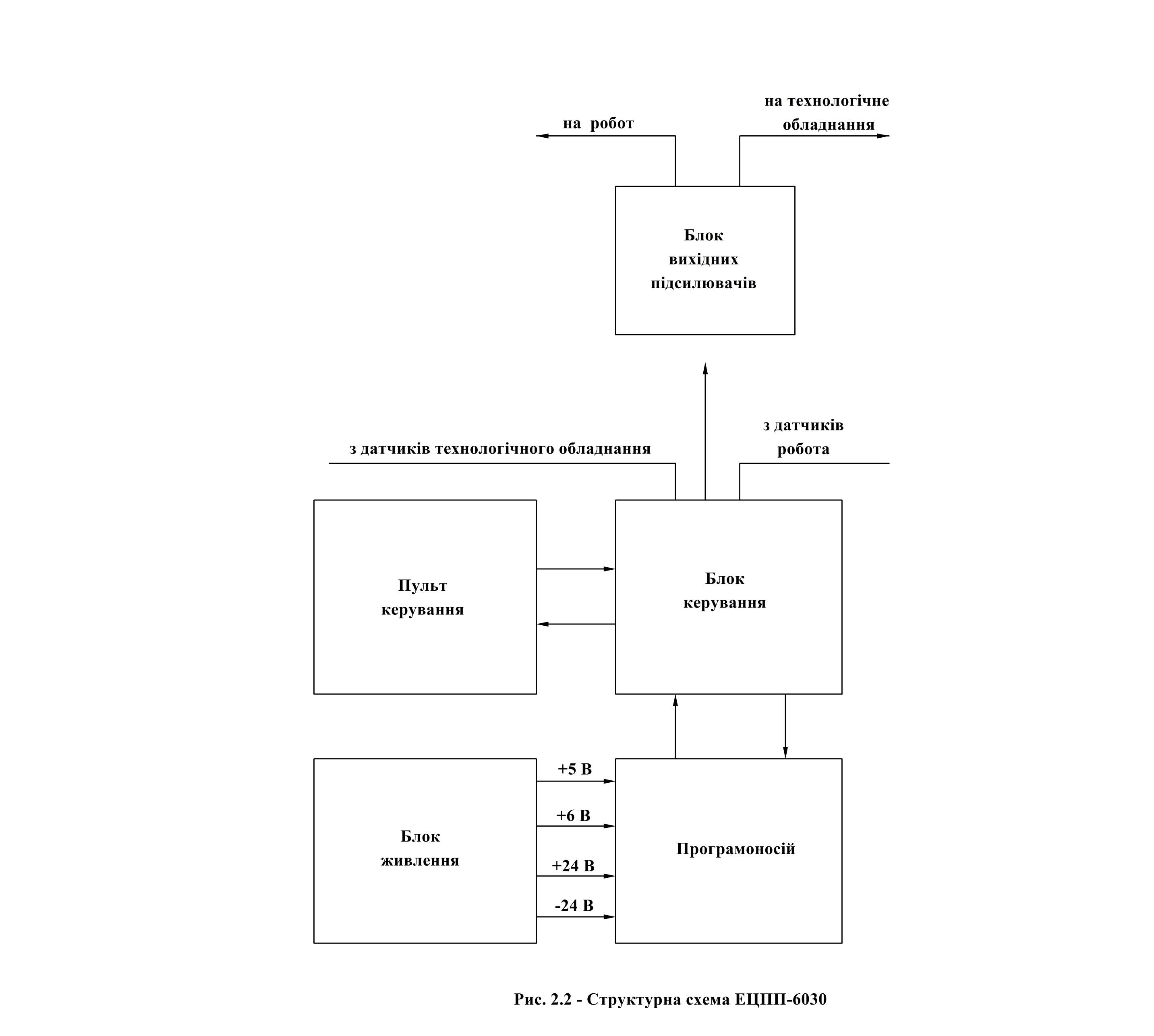
На рис.2.2 зображена структурна схема ЕЦІ111-6030, на якій вказано зв'язки між вузлами і блоками.
Блок керування обробляє інформацію згідно заданої програми і видає керуючі сигнали на робот і технологічне обладнання, формує команди керування виконавчими вузлами робота і технологічного обладнання на основі інформації, яка надходить з програмоносія, сигналів від датчиків положення вузлів робота, контролює стан керуючих пристроїв на пульті керування.
Пульт керування забезпечує вказані режими роботи, виконання операцій включення-виключення струму, запуск в роботу, ручне керування окремими вузлами робота; також призначений дам оперативного керування пристроями і відображення стану робота.
Рис.
2.1 - Схема РТК: а) вид збоку, б) вид зверху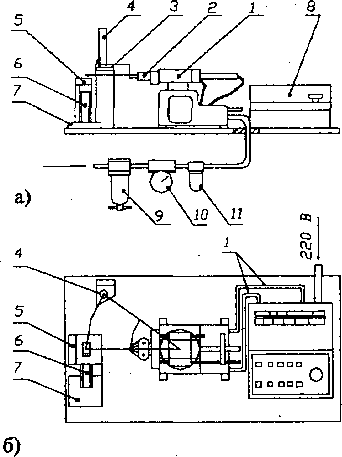
Програмоносій забезпечує набір та зберігання необхідної програми роботи робота і виконаний у виді двох наборних полів (верхнього і нижнього)
з багатопозиційних перемикачів, розміщений в верхній частині пристрою в спеціальній ніші, яка закривається кришкою.
Кожний кадр програми може включати одну або дві команди, які набираються відповідно на верхньому і нижньому полях програмонсія.
Блок підсилювачів забезпечує видачу керуючих команд на розподілювачі робота і технологічного обладнання.
Блок живленнязабезпечує живлення струмом електронного обладнання, датчиків робота і технологічного обладнання.
Технічна характеристика робота мп-9с
Максимальна величина горизонтального
Перед початком роботи РТК необхідно в пневматичну систему робота подати стиснене повітря через систему підготовки стисненого повітря, змонтовану під столом, яка складається з очисника 8 (див. рис.2.1), стабілізатора тиску 9 і лубрикатора 11.
Після включення живлення вузли робота автоматично приходять в положення, яке відповідає зображенню в нижньому ряду табло індикатора пристрою ЕЦПП. Щоб уникнути небажаних переміщень робочих вузлів робота при включенні живлення, робочі вузли робота перед включенням живлення необхідно- вручну вивести в вихідне положення відповідно табло індикації стану робочих вузлів.
Вводимо в робочий стан пристрій ЕЦПП. Настроюємо робот на задану програму з допомогою програмоносія, виконаному в виді двох наборних полів з багатопозиційних перемикачів, розміщеному в верхній частині пристрою ЕЦГОІ.
В режимі “РУЧНОЙ” виконуємо обробку всіх команд керування роботом. Після цього працюємо Згідно програми в режимах “ЦИКЛ” і “АВТОМАТ”.
На пульті керування можемо задавати один з режимів роботи робота: “РУЧНОЙ”, “КОМАНДА”, “ЦИКЛ”, “АВТОМАТ”.
В режимі “РУЧНОЙ” команди на робот задаються з пульту керування і надходять через блок підсилювачів до виконавчих органів, які переміщуються.
Контроль положення виконавчих органів робота здійснюється за допомогою табло індикації стану його виконавчих органів.
В режимі “КОМАНДА” забезпечується виконання одного кадру програми, яка в цей момент задається програмоносієм.
Після відпрацювання програми відповідний орган зупиняється.
В режимі “ЦИКЛ” забезпечується одноразове відпрацювання всіх кадрів програми.
В режимі “АВТОМАТ” забезпечується багаторазове відпрацювання робочого циклу робота.
При натисканні кнопки “РУЧНОЙ” на виконавчий орган видається команда, мнемонічне зображення якої нанесено на табло над відповідною кнопкою, табло при цьому засвічується.
Кнопка “ПУСК” функціонує тільки в режимах “АВТОМАТ”, “ЦИКЛ” і “КОМАНДА”.
При натисканні на цю кнопку система починає працювати згідно з програмою, одночасно засвічується табло “РАБОТА”.
Кнопка “СТОП” служить для зупинки працюючого робота. Якщо натиснути на цю кнопку, табло “РАБОТА” погасне.
Кнопка “СЧК” використовується для попередньої установки лічильника кадрів в початковий стан.
Кнопка “СЕТЬ” призначена для включення живлення.
Програма складається згідно з циклограмою роботи робота, яка розбивається на кроки. Максимальне число кроків програми - ЗО. Система команд пристрою ЕЦПП-6030 приведена в табл. 2.1. Верхнє і нижні поля програмоносія дозволяють виконати одну або дві команди. Якщо команда набирається на одному з полів, а на другому - 0, то цей кадр складає одну команду. Кадр сумісної обробки формується з двох команд, які набираються в одному кроці на верхньому і нижньому полях.
Перехід до наступного кроку виконується після виконання команд керування робочими органами робота попереднього кроку, які набрані на програмоносії.
Таблиця 2.1 - Система команд пристрою ЕЦ1Ш-6030
|
Ко манда |
Назва команди |
Кодкадра | |
|
Верхнє поле |
Нижнє поле | ||
|
1 |
Переміщення руки вперед |
І |
0 |
|
2 |
Переміщеная рука назад |
2 |
0 |
|
3 |
Поворот вправо |
3 |
0 |
|
4 |
Поворот вліво |
4 |
0 |
|
5 |
Піднімання вверх |
0 |
1 |
|
6 |
Опускання вниз |
0 |
2 |
|
7 |
Захватний пристрій закрито |
0 |
6 |
|
8 |
Захватний пристрій відкрито |
0 |
5 |
|
9 |
Технологічна команда 1 |
9 |
1 |
|
10 |
Технологічна команда 2 |
9 |
2 |
|
11 |
Технологічна команда 3 |
9 |
3 |
|
12 |
Технологічна команда 4 |
9 |
4 |
|
13 |
Технологічна команда 5 |
9 |
5 |
|
14 |
Технологічна команда 6 |
9 |
б |
|
15 |
Витримка часу |
0 |
9 |
|
16 |
Пропуск |
9 |
7 |
|
17 |
Перехід |
9 |
8 |
|
18 |
Зупинка |
9 |
9 |
|
19 |
Кінець програми |
0 |
0 |
Технологічна команда - команда керування технологічним обладнанням. В кадрі програми може бути набрана тільки одна технологічна команда.
Команда “ВЬІДЕРЖКА ВРЕМЕНИ” предназначена для введення затримки між кроками.
Команда “ОСТАНОВ” служить для зупинки пристрою, який працює згідно з програмою.
Команда “КОНЕЦ ПРОГРАММЬІ” служить для зациклення програми роботи робота.
При виконанні цієї команди лічильник кадрів скидається в вихідний нульовий стан, після цього виконання програми повторюється.
В режимі “ЦИКЛ”, крім того, при виконання команди “КОНЕЦ ПРОГРАММЬІ” виконується зупинка пристрою.