

ВВЕДЕНИЕ
Дидактический материал предназначен студентам всех специальностей заочного факультета ГУЦМиЗ, изучающих курс механики по программе для инженерно-технических специальностей.
Дидактический материал содержит краткое изложение теории по изучаемой теме, адаптированной к уровню обученности студентов-заочников, примеры решения типовых задач, вопросы и задания, аналогичные предлагаемым студентам на экзаменах, справочный материал.
Цель такого материала – помочь студенту-заочнику самостоятельно в сжатые сроки усвоить кинематическое описание поступательного и вращательного движений, используя метод аналогии; научиться решать численные и качественные задачи, разбираться в вопросах, связанных с размерностью физических величин.
Особое внимание уделяется решению качественных задач, как одному из приемов более глубокого и сознательного усвоения основ физики, необходимых при изучении специальных дисциплин. Они помогают понять смысл происходящих явлений природы, уяснить сущность физических законов и уточнить область их применения.
Дидактический материал может быть полезен студентам дневной формы обучения.
КИНЕМАТИКА
Часть физики, изучающую механическое движение, называют механикой. Под механическим движением понимают изменение с течением времени взаимного расположения тел или их частей.
Кинематика – первый раздел механики, она изучает законы движения тел, не интересуясь причинами, вызывающими это движение.
1. Материальная точка. Система отсчета. Траектория.
Путь. Вектор перемещения
Простейшая модель кинематики - материальная точка. Это тело, размерами которого в данной задаче можно пренебречь. Любое тело можно представить как совокупность материальных точек.
Чтобы математически описать движение тела, необходимо определиться с системой отсчета. Система отсчета (СО) состоит из тела отсчета и связанных с ним системы координат и часов. Если в условии задачи нет специальных указаний, считается, что система координат связана с поверхностью Земли. В качестве системы координат чаще всего используется декартова система.
Пусть требуется описать движение материальной точки в декартовой системе координат ХУZ (рис.1). В некоторый момент времени t1 точка находится в положении А. Положение точки в пространстве можно характеризовать радиусом - вектором r1, проведенным из начала координат в положение А, и координатами x1, y1, z1. Здесь и далее векторные величины обозначены жирным курсивом. К моменту времени t2 = t1 + Δ t материальная точка переместится в положение В с радиус вектором r2 и координатами x2, y2, z2.
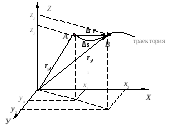
Рис.1
Траекторией движения называется кривая в пространстве, по которой движется тело. По виду траектории различают прямолинейное, криволинейное движения и движение по окружности.
Длина пути (или путь) - длина участка АВ, измеренная по траектории движения, обозначается через Δs (или s). Путь в международной системе единиц (СИ) измеряется в метрах (м).
Вектор перемещения материальной точки Δr представляет собой разность векторов r2 и r1 , т.е.
Δr = r2 - r1.
Модуль этого вектора, называемый перемещением, является кратчайшим расстоянием между положениями А и В (начальным и конечным) движущейся точки. Очевидно, что Δs ≥ Δr, причем равенство выполняется при прямолинейном движении.
При движении материальной точки значение пройденного пути, радиуса-вектора и его координат меняется со временем. Кинематическими уравнениями движения (в дальнейшем уравнениями движения) называют их зависимости от времени, т.е. уравнения вида
s=s(t), r= r(t), x=х(t), y=у(t), z=z(t).
Если для движущегося тела известно такое уравнение, то в любой момент времени можно найти скорость его движения, ускорение и т.д., в чем далее убедимся.
Любое движение тела можно представить как совокупность поступательного и вращательного движений.
2. Кинематика поступательного движения
Поступательным называют такое движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной самой себе.
Скорость характеризует быстроту движения и направление движения.
Средней скоростью движения в интервале времени Δt называется величина
![]() (1)
(1)
где - s отрезок пути, пройденный телом за время за время t.
Мгновенной скоростью движения (скорость в данный момент времени) называют величину, модуль которой определяется первой производной от пути по времени
![]() (2)
(2)
Скорость - векторная величина. Вектор мгновенной скорости всегда направлен по касательной к траектории движения (рис.2). Единица измерения скорости – м/с.
Значение скорости зависит от выбора системы отсчета. Если человек сидит в вагоне поезда, он вместе с поездом движется относительно СО, связанной с землей, но покоится относительно СО, связанной с вагоном. Если человек ходит по вагону со скоростью , то его скорость относительно СО «земля» з зависит от направления движения. Вдоль движения поезда з = поезда + , против з = поезда - .
Проекции вектора скорости на оси координат υх ,υу ,υz определяются как первые производные от соответствующих координат по времени (рис. 2):
![]()

Рис.2.
Если известны проекции скорости на оси координат, модуль скорости можно определить по теореме Пифагора:
![]() (3)
(3)
Равномерным называют движение с постоянной скоростью (υ = const). Если при этом не меняется направление вектора скорости v, то движение будет равномерным прямолинейным.
Ускорение - физическая величина, характеризующая быстроту изменения скорости по величине и направлению Среднее ускорение определяется как
![]() (4)
(4)
где Δυ - изменение скорости за отрезок времени Δt.
Вектор мгновенного ускорения определяется как производная от вектора скорости v по времени:
![]() (5)
(5)
Поскольку при криволинейном движении скорость может изменяться как по величине, так и по направлению, принято разлагать вектор ускорения на две взаимно перпендикулярные составляющие
а = аτ + аn. (6)
Тангенциальное (или касательное) ускорение аτ характеризует быстроту изменения скорости по величине, его модуль
![]() .(7)
.(7)
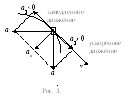
Тангенциальное ускорение направлено по касательной к траектории движения по скорости при ускоренном движении и против скорости при замедленном движении (рис. 3)..
Нормальное (центростремительное) ускорение аn характеризует изменение скорости по направлению, его модуль
![]() (8)
(8)
где R - радиус кривизны траектории.
Вектор нормального ускорения направлен к центру окружности, которую можно провести касательно к данной точке траектории; он всегда перпендикулярен вектору тангенциального ускорения (рис.3).
Модуль полного ускорения определяется по теореме Пифагора
![]() .
(9)
.
(9)
Направление вектора полного ускорения а определяется векторной суммой векторов нормального и тангенциального ускорений (рис.3)
Равнопеременным называют движение с постоянным ускорением. Если ускорение положительно, то это равноускоренное движение, если же оно отрицательно - равнозамедленное.
При прямолинейном движении а ם =0 и а = аτ. Если а ם=0 и аτ = 0, тело движется прямолинейно и равномерно; при а ם=0 и аτ = const движение прямолинейное равнопеременное .
При равномерном движении пройденный путь вычисляется по формуле:
ds = dt → s = ∫dt = ∫dt = t + s0, (10 )
где s0 - начальный путь для t = 0. Последнюю формулу необходимо запомнить.
Графические зависимости υ(t) и s(t) приведены на рис .4.

Для равнопеременного движения = ∫а dt = а∫ dt, отсюда
= аt + 0, (11)
где 0 - начальная скорость при t=0.
Пройденный путь s= ∫dt = ∫(аt + 0)dt. Решая этот интеграл, получим
s = аt2/2 + 0t + s0, (12)
где s0 - начальный путь (для t = 0). Формулы (11), (12) рекомендуем запомнить.
Графические зависимости а(t), υ(t) и s(t) приведены на рис .5.
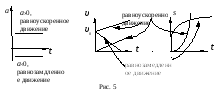
К равнопеременному движению с ускорением свободного падения g = 9,81 м/с2 относится свободное движение тел в вертикальной плоскости: вниз тела падают с g›0, при движении вверх ускорение g‹ 0. Скорость движения и пройденный путь при этом изменяется согласно (11):
= 0 + g t; (13)
h = gt2/2 + 0t + h 0. (14)
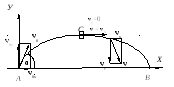
Рассмотрим движение тела, брошенного под углом к горизонту (мяч, камень, пушечный снаряд,… ). Это сложное движение состоит из двух простых: по горизонтали вдоль оси ОХ и вертикали вдоль оси ОУ (рис.6). По горизонтальной оси в отсутствие сопротивления среды движение равномерное; по вертикальной оси - равнопеременное: равнозамедленное до максимальной точки подъема и равноускоренное после нее. Траектория движения имеет вид параболы. Пусть 0 - начальная скорость тела, брошенного под углом α к горизонту из точки А (начало координат). Ее составляющие по выбранным осям:
0x = x = 0 cos α = const; (15)
0у = 0 sinα. (16)
О
Рис. 6.
Согласно формуле (13) имеем для нашего примера в любой точке траектории до точки С
у = 0у - g t = 0 sinα. - g t ;
х = 0х = 0 cos α = const.
В наивысшей точке траектории, точке С, вертикальная составляющая скорости у = 0. Отсюда можно найти время движения до точки С:
у = 0у - g t = 0 sinα. - g t = 0 → t = 0 sinα/ g. (17)
Зная это время, можно определить максимальную высоту подъема тела по (14):
hmax= 0уt- gt2/2=0 sinα 0 sinα/g – g(0 sinα /g)2/2 = (0 sinα)2/(2g) (18)
Поскольку траектория движения симметрична, то полное время движения до конечной точки В равно
t1 =2 t = 20 sinα / g. (19)
Дальность полета АВ с учетом (15) и (19) определится так:
АВ = х t1 = 0 cosα 20 sinα/ g = 202cosα sinα/ g. (20)
Полное ускорение движущегося тела в любой точке траектории равно ускорению свободного падения g ; его можно разложить на нормальное и тангенциальное, как было показано на рис.3.