

Mathcad - ЛР6
.pdfМинистерство образования Российской Федерации Санкт - Петербургский государственный политехнический университет
Институт менеджмента и информационных технологий
Кафедра ПО ВТ и АС
Лабораторный практикум по курсу вычислительной математики
ОТЧЕТ
по лабораторной работе №6
Тема:
ЧИСЛЕННОЕ РЕШЕНИЕ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ (ЗАДАЧА КОШИ)
Выполнил: _______________
Группа: _____
Вариант: 14
Проверил: Царев В.А.
Отметка о зачете __________________
" ___ " ______________ 2006 г.
Череповец
2006
Задача 6.1. Найти приближенное решение задачи Коши для обыкновенного дифференциального
уравнения (ОДУ) 1 порядка
y '(t) = f (t, y(t)), t [t0,T ], (1) y(t0) = y0
и оценить погрешность решения задачи. ПОРЯДОК РЕШЕНИЯ ЗАДАЧИ:
1.Задать исходные данные: функцию f правой части, начальное значение y0 .
2.Используя функцию eyler (см. ПРИЛОЖЕНИЕ 6.B), найти приближенное решение задачи Коши с шагом h=0.1 по явному методу Эйлера.
3.Используя встроенную функцию rkfixed пакета MATHCAD, найти приближенное решение задачи Коши с шагом h=0.1 (см. ПРИЛОЖЕНИЕ 6.B).
4.Найти решение задачи Коши аналитически.
5.Построить таблицы значений приближенных и точного решений. На одном чертеже построить графики приближенных и точного решений.
6.Оценить погрешность приближенных решений двумя способами:
a) по формуле ε = max | y(ti ) − yi |; здесь y(ti )и yi - значения точного и приближенного
0≤i≤N
решений в узлах сетки ti , i=1,..N;
b) по правилу Рунге (по правилу двойного пересчета) (см. ПРИЛОЖЕНИЕ 6.C).
7.Выяснить, при каком значении шага h=h* решение, полученное по методу Эйлера, будет иметь такую же погрешность (см. п. 6а), как решение, полученное с помощью метода Рунге-Кутты с шагом h=0.1.
УКАЗАНИЕ. В п. 7 рекомендуется провести серию вычислений решения по методу Эйлера, дробя шаг h пополам.
Теоретический материал:
Метод Эйлера относится к явным методам и реализуется следующей формулой: yk +1 = yk + h × f (xk , yk )
где f (xk , yk ) - производная функции.
Метод Эйлера имеет второй порядок локальной точности и первый порядок глобальной точности.
Значительно более точный результат численного дифференцирования дает метод Рунге- Кутты четвертого порядка точности. Вычисления по данному методу производятся по следующей схеме:
yi+1 |
= yi + |
h |
(K1 + 2K2 + 2K3 + K4 ) |
||
|
|||||
|
|
6 |
|
|
|
K1 = f (xi , yi ) |
|
||||
K2 |
= f (xi |
+ 0.5h, yi |
+ 0.5h × K1 ) |
||
K3 |
= f (xi |
+ 0.5h, yi |
+ 0.5h ×K 2) |
||
K4 |
= f (xi + h, yi + h × K3 ) |
||||

Правило Рунге практической оценки погрешности (правило двойного пересчета):
Одним из наиболее простых, широко применяемых и достаточно эффективных методов
оценки погрешности и уточнения полученного решения при численном решении ОДУ является правило Рунге. Для оценки погрешности решения дифференциального уравнения (разницы между точным и приближенным решением в узлах) применяют первую формулу Рунге:
|
y(h / 2) |
− y(h) |
|
|
|
y(ti ) − yi(h / 2) ≈ εi(h) , |
|||||
где εi(h) = |
|
|
|
|
|
|
|
||||
2i |
i |
|
, i= 0, … , n – задает номера узлов сетки ti , построенной с шагом h , |
||||||||
2 p −1 |
|
||||||||||
|
yi(h) |
и y2(hi / 2) - приближенные решения уравнения с шагом h и h / 2 |
|||||||||
p – порядок метода, |
|||||||||||
соответственно в узле ti . |
|
|
|
|
|||||||
Исходные данные: |
|
|
|
|
|
|
|
|
|
||
Правая часть уравнения: |
f(t , y) := |
y |
|
- |
12 |
|
|||||
t |
|
||||||||||
|
|
|
|
|
|
|
t |
3 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Начальное значение:
Решение задачи:
y0 := 4 |
Отрезок: t0 := 1 |
T := 2 Шаг сетки: h := 0.1 |
Число узлов сетки: N := |
T - t0 |
N = 10 |
|
h
i := 1 .. N
ti := t0 + i×h
Функция, реализующая явный метод Эйлера; возвращает вектор решения:
eyler(f , y0, t0 , h, N) := y0 ¬ y0
for i Î 0 .. N - 1
yi+1 ¬ yi + h×f(t0 + i×h, yi)
y
yE := eyler(f , y0 , t0 , h, N)
Входные параметры:
f - функция правой части; y0 - начальное значение; t0 - начальная точка отрезка;
h - шаг сетки;
N - число узлов сетки.
|
|
0 |
|
|
0 |
4 |
|
|
1 |
3.2 |
|
|
2 |
2.5893313298272 |
|
|
3 |
2.11066449620169 |
|
yE = |
4 |
1.72682394083441 |
|
5 |
1.4128507237803 |
||
|
|||
|
6 |
1.15148521647677 |
|
|
7 |
0.930484292506567 |
|
|
8 |
0.740968713539418 |
|
|
9 |
0.576372325196958 |
|
|
10 |
0.431755093734077 |
|
|
|
|
ВЫЧИСЛЕНИЕ РЕШЕНИЯ ПРИ ПОМОЩИ ВСТРОЕННОЙ ФУНКЦИИ (она реализует метод Рунге-Кутты 4-го порядка):
yRK4 := rkfixed(y, t0 , T , N , f) |
- встроенная функция; |
|
входные параметры: |
|
y - вектор начальных значений; |
|
t0- начальная точка отрезка; |
|
T - конечная точка отрезка; |
|
N - число узлов сетки; |
|
f - функция правой части. |
Функция rkfixed возвращает матрицу, первый столбец которой содержит узлы сетки, а второй - приближенное решение в этих узлах.
|
|
0 |
|
1 |
|
0 |
|
1 |
4 |
|
1 |
|
1.1 |
3.30576298486409 |
|
2 |
|
1.2 |
2.77774195868259 |
|
3 |
|
1.3 |
2.36681861272695 |
yRK4 = |
4 |
|
1.4 |
2.04076377359122 |
5 |
|
1.5 |
1.77771918609449 |
|
|
|
|||
|
6 |
|
1.6 |
1.56243607225608 |
|
7 |
|
1.7 |
1.38401420013955 |
|
8 |
|
1.8 |
1.23449439708241 |
|
9 |
|
1.9 |
1.10795524063915 |
|
10 |
|
2 |
0.999917609225951 |
|
|
|
|
|
yTrue(t) := |
4 |
|
- точное решение диф. уравнения |
|
t2 |
||||
|
|
|||

|
3 |
|
|
|
|
yEi |
|
|
|
|
|
yRK4i , 1 |
2 |
|
|
|
|
yTrue(ti) |
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
1.2 |
1.4 |
1.6 |
1.8 |
|
|
|
|
ti |
|
Произведем оценку погрешностей приближенных решений: |
|||||
Вычисление погрешностей решения:
eE_1i := |
|
yTrue(ti) - yEi |
|
|
eRK4_1i := |
|
yTrue(ti) - yRK4i , 1 |
|
|
|
|
|
|
||||||
max_e_E := max(eE_1) |
max_e_RK4 := max(eRK4_1) |
||||||||
max_e_E = 0.568244906265923 |
max_e_RK4 = 8.23907740494789 ´ 10- 5 |
||||||||
Вычисление погрешностей решения по правилу Рунге:
Вычисление приближенных решений с шагом h/2:
h2 := |
h |
|
N2 := |
T - t0 |
|
N2 = 20 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||
2 |
|
|
|
h2 |
|
|
|
|
|
|
|
|
|||
yEh2 := |
eyler(f , y0 , t0 , h2 , N2) |
yRK4h2 := rkfixed(y, t0 , T , N2 , f) |
|
|
|
||||||||||
Вычисление погрешностей по точкам: |
i := 0 .. N |
|
|
|
|
|
|||||||||
zEi := |
|
yEh22×i - yEi |
|
|
zRK4i := |
|
(yRK4h2á1ñ) |
2×i |
- (yRK4á1ñ ) |
i |
|
|
|||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значение погрешностей: |
|
|
|
|
|
|
|
|
|||||||
max(zE) = 0.285306411369347 |
max(zRK4) = 5.14246690531313 ´ 10- 6 |
||||||||||||||
Расчет абсолютной погрешности через функцию Mmax:
Mmax(y, yr , n) := max ¬ 0 for i Î 0 .. n
max ¬ yi - yri if yi - yri > max
max
Функция, рассчитывающая текущую погрешность и соответствующий ей шаг при заданной целевой погрешности.
get_h(h , e , yTrue) := |
s0 ¬ 1 |
|
|
|
|
||
|
while s0 > e |
||||||
|
|
N ¬ |
|
T - t0 |
|
||
|
|
|
|||||
|
|
h |
|||||
|
|
|
|
|
|
||
|
|
for |
i Î 0 .. N |
||||
|
|
|
ti ¬ t0 + i×h |
||||
|
|
|
|||||
|
|
|
yti ¬ yTrue(ti) |
||||
|
|
yE |
¬ eyler(f , y0 , t0 , h, N) |
||||
|
|
s0 ¬ Mmax(yt , yE , N) |
|||||
|
|
s1 ¬ h |
|||||
|
|
h ¬ |
h |
||||
|
|
|
|
|
|||
2 |
|
|
|||||
|
s |
|
|
|
|
||
æ |
6.86646663453638 ´ |
− 5 |
öпогрешность |
ç |
10 |
÷ |
|
get_h(0.1 , max_e_RK4 , yTrue) = ç |
1.220703125 ´ 10− 5 |
÷ |
|
è |
ø |
||
|
|
|
шаг |
При шаге 1.220703125 ´ 10− 5 погрешность метода Эйлера станет лучше погрешности
метода Рунге-Кутты четвертого порядка с шагом h=0.1
Вывод: В ходе проведенного численного эксперимента метод Рунге - Кутты показал точность на четыре порядка более высокую, по сравнению с методом Эйлера, что согласуется с теоретическими сведениями об этих алгоритмах. Оценка погрешности по методу Рунге дает лишь приближенное значение.
Задача 6.2. Задача Коши для ОДУ 2 порядка
mx′′ + Hx′ + kx = f (t) , x(0) = x0
x′(0) = v0
t [0,T ],
описывает движение груза массы m, подвешенного к концу пружины. Здесь x(t) – смещение груза от положения равновесия, H – константа, характеризующая силу сопротивления среды, k –коэффициент
упругости пружины, f(t) – внешняя сила. Начальные условия: x0 – смещение груза в начальный момент
времени t=0, v0 – скорость груза в начальный момент времени. Промоделировать движение груза на
временном отрезке [0,T] при заданных в индивидуальном варианте трех наборах (I, II, III) значений параметров задачи. Для каждого набора по найденной таблице (или графику) решения задачи определить максимальное и минимальное значения функции x(t) и моменты времени, в которые эти значения достигаются. Предложить свой вариант задания параметров, при которых характер колебаний груза существенно отличается от рассмотренного ранее.
ПОРЯДОК РЕШЕНИЯ ЗАДАЧИ:
1. Заменить исходную задачу эквивалентной задачей Коши для системы ОДУ 1 порядка:
′ |
= x2 |
|
||
x1 |
|
|||
′ |
= |
f (t) − Hx2 − kx1 |
|
|
x2 |
|
|
||
m |
(2) |
|||
|
|
|||
x1(0) = x0 x2 (0) = v0
2.Для каждого варианта выбора параметров решить задачу (2) с помощью встроенной функции rkfixed пакета MATHCAD (см. ПРИЛОЖЕНИЕ 7.B) с шагом h=0.1.
3.Для каждого варианта выбора параметров построить график найденного решения. Сравнить характер движения груза и дать физическую интерпретацию полученного движения.
4.Для каждого варианта выбора параметров определить требуемые в задаче характеристики.
Исходные данные I:
H (t) := 1 |
K := 1 m := 1 |
f(t) := cos(t) |
|||
X0 := 0 |
V0 := 0 |
t0 := 0 |
T := 34 Шаг сетки: h := 0.1 |
||
Решение задачи I: |
|
|
|
||
Число узлов сетки: |
N := |
T - t0 |
|
||
h |
|||||
|
|
|
|||
Формирование вектора правой части системы ОДУ (1) и вектора начальных условий для применения встроенной функции rkfixed:
f1(t , x1 , x2) := x2 |
f2(t , x1 , x2) := |
|
f(t) - H(t) ×x2 - K×x1 |
|||
|
m |
|||||
|
|
|
|
|
|
|
|
æX0 ö |
æf1(t , x0 , x1) ö |
||||
x := |
çV0 |
÷ |
D (t , x) := çf2 |
(t , x , x ) ÷ |
||
|
è |
ø |
è |
0 1 |
ø |
|
xRK4 := rkfixed(x, t0 , T , N , D)

get_minimum (m , n1 , n2) := |
min ← 1015 |
|||
|
|
|
for |
i n1 .. n2 |
|
|
|
if |
mi , 1 < min |
|
|
|
|
min ← mi , 1 |
|
|
|
|
result0 ← mi , 0 |
|
|
|
|
result1 ← mi , 1 |
|
|
|
|
result2 ← i |
|
|
|
result |
|
get_maximum(m , n1 , n2) := |
max ← 0 |
|||
|
|
|
for |
i n1 .. n2 |
|
|
|
if |
mi, 1 > max |
|
|
|
|
max ← mi , 1 |
|
|
|
|
result0 ← mi, 0 |
|
|
|
|
result1 ← mi, 1 |
|
|
|
|
result2 ← i |
|
|
|
result |
|
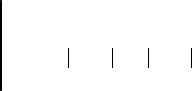
График решения: |
|
i := 0 .. N |
||
|
1 |
|
|
|
xRK4i , 1 |
0 |
|
|
|
|
1 0 |
10 |
20 |
30 |
|
|
xRK4i , 0 |
|
|
Исходные данные II: |
|
|
||
æ |
17.3 |
ö |
get_minimum (xRK4, 0 , 340) = ç |
−0.999910402134673 |
÷ |
ç |
|
÷ |
è |
173 |
ø |
æ26.7000000000001 ö get_maximum(xRK4, 0 , 340) = çç0.99999715251772 ÷÷ è 267 ø
H (t) := 1 |
K := 1 m := 14 |
f(t) := cos(t) |
|||
X0 := 0 |
V0 := 0 |
t0 := 0 |
T := 34 Шаг сетки: h := 0.1 |
||
Решение задачи II: |
|
|
|
||
Число узлов сетки: |
N := |
T − t0 |
|
||
h |
|||||
|
|
|
|||
Формирование вектора правой части системы ОДУ (1) и вектора начальных условий для применения встроенной функции rkfixed:
f1(t , x1 , x2) := x2 |
f2(t , x1 , x2) := |
f(t) - H(t) ×x2 - K×x1 |
|
m |
|||
|
|
æX0 ö |
|
æf1 |
(t , x , x ) ö |
||
D (t , x) := çf2 |
0 |
1 |
|||
x := çV0 |
÷ |
(t , x , x ) ÷ |
|||
è |
ø |
|
è |
0 |
1 ø |
xRK4 := |
rkfixed(x, t0 , T , N , D) |
|
|
||
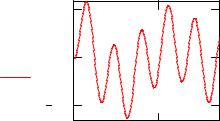
График решения: |
i := 0 .. N |
|
|||
|
|
0.1 |
|
|
|
xRK4i , 1 |
0 |
|
|
|
|
|
|
0.1 |
|
|
|
|
|
0 |
20 |
|
|
|
|
|
xRK4i , 0 |
|
|
Исходные данные III: |
|
|
|||
æ |
12.4 |
ö |
get_minimum (xRK4, 0 , 340) = ç-0.123912023170379 ÷ |
||
ç |
|
÷ |
è |
124 |
ø |
æ |
2.9 |
ö |
get_maximum(xRK4, 0 , 340) = ç |
0.117792615900578 |
÷ |
ç |
|
÷ |
è |
29 |
ø |
H (t) := 1 |
K := 1 m := 28 |
f(t) := cos(t) |
|||
X0 := 0 |
V0 := 0 |
t0 := 0 |
T := 34 Шаг сетки: h := 0.1 |
||
Решение задачи III: |
|
|
|
||
Число узлов сетки: |
N := |
T - t0 |
|
||
h |
|||||
|
|
|
|||
Формирование вектора правой части системы ОДУ (1) и вектора начальных условий для применения встроенной функции rkfixed:
f1(t , x1 , x2) := x2 |
f2(t , x1 , x2) := |
|
f(t) - H(t) ×x2 - K×x1 |
||||
|
m |
||||||
|
|
|
|
|
|
|
|
|
æX0 |
ö |
æf1 |
(t , x , x ) ö |
|||
|
D (t , x) := çf2 |
0 |
1 |
|
|
||
x := |
çV0 |
÷ |
(t , x , x ) ÷ |
||||
|
è |
ø |
è |
0 |
1 |
ø |
|
xRK4 := rkfixed(x, t0 , T , N , D)
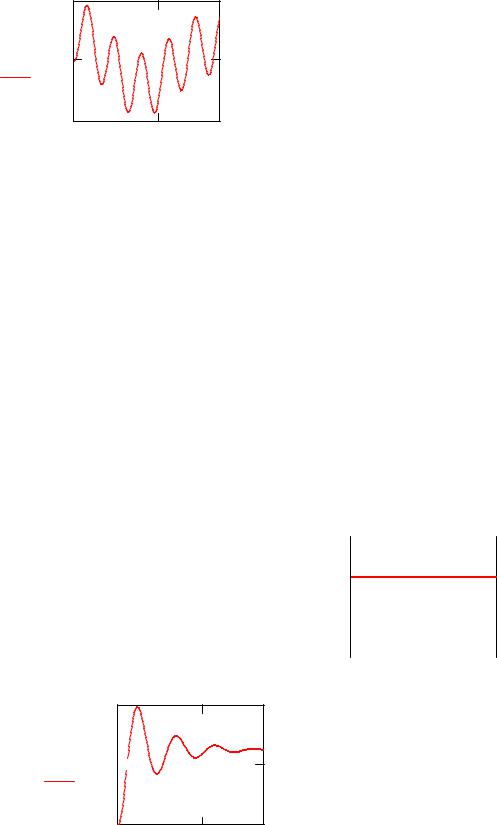
График решения: |
i := 0 .. N |
|
xRK4i , 1 |
0 |
|
|
0 |
20 |
|
|
xRK4i , 0 |
Исходные данные IV: |
||
æ |
18.7 |
ö |
get_minimum (xRK4, 0 , 340) = ç-0.060414912262805 ÷ |
||
ç |
|
÷ |
è |
187 |
ø |
æ |
3 |
ö |
get_maximum(xRK4, 0 , 340) = ç |
0.064517539485313 |
÷ |
ç |
|
÷ |
è |
30 |
ø |
H (t) := 2 |
K := 4 m := 8 |
f(t) := 10 |
|||
X0 := 0 |
V0 := 0 |
t0 := 0 |
T := 34 Шаг сетки: h := 0.1 |
||
Решение задачи IV: |
|
|
|
||
Число узлов сетки: |
N := |
T - t0 |
|
||
h |
|||||
|
|
|
|||
Формирование вектора правой части системы ОДУ (1) и вектора начальных условий для применения встроенной функции rkfixed:
f1(t , x1 , x2) := x2 |
f2(t , x1 , x2) := |
|
f(t) - H(t) ×x2 - K×x1 |
|
|
|
|
|||||
|
|
m |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
æX0 ö |
æf1(t , x0 , x1) ö |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
x := |
çV0 |
÷ |
D (t , x) := çf2 |
(t , x , x ) ÷ |
|
|
|
|
|
|
||
|
è |
ø |
è |
0 1 |
ø |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
f(z) |
|
|
|
||
xRK4 := rkfixed(x, t0 , T , N , D)
График решения: |
i := 0 .. N |
4
xRK4i , 1 2 

0 0 |
20 |
xRK4i , 0
|
9.99 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
9.98 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
0 |
20 |
40 |
60 |
|
|
||||||
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
0 ö |
|
||
get_minimum (xRK4, 0 , 340) = ç |
0 |
÷ |
|
||||||||
|
|
|
|
|
|
|
ç |
|
÷ |
|
|
|
|
|
|
|
|
|
è |
0 |
ø |
|
|
|
|
|
|
|
|
|
æ |
4.5 |
ö |
||
get_maximum(xRK4, 0 , 340) = ç3.92190222525123 |
÷ |
||||||||||
|
|
|
|
|
|
|
ç |
|
÷ |
||
|
|
|
|
|
|
|
è |
45 |
ø |
||