

8.4.Синтез систем регулирования скорости.
Тиристорные системы регулирования скорости электроприводов постоянного и переменного тока в структурном плане представляют собой двухконтурные САР с подчиненным контуром регулирования тока (электромагнитного момента). Электромашинные системы регулирования скорости электроприводов постоянного тока чаще всего выполняются трехконтурными с подчиненными контурами регулирования тока якоря и напряжения генератора. Применение внутренних контуров САР обеспечивает оптимальное регулирование и простоту ограничения подчиненных координат на допустимых уровнях.
8.4.1.Синтез системы регулирования скорости“Тиристорный
преобразователь - двигатель постоянного тока”.
Синтез САР скорости осуществляют в 2 этапа.
1. Синтез контура регулирования тока якоря.
Структурная схема контура регулирования тока якоря приведена на рис. 8.5.
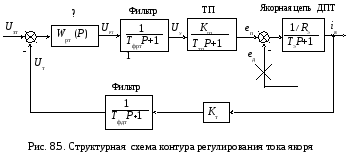 Допущение
при синтезе:
пренебрегаем
влиянием обратной связи по э.д.с.
двигателя, т. е. полагаем eд
= 0. Допущение вполне оправдано, поскольку
изменение скорости (э.д.с.),
как правило, происходит гораздо медленнее
в сравнении с током якоря. В качестве
условия, гарантирующего обоснованность
такого пренебрежения, принимают
следующее:
Tм
10T
. Если это условие не соблюдается, то
пренебрежение влиянием обратной связи
по э.д.с. при синтезе приводит к тому,
что контур тока якоря становится
статическим и электропривод недоиспользуется
по перегрузочной способности при пуске
и торможении. В
этом случае необходимо вводить
компенсацию э.д.с.
двигателя /4/.
Допущение
при синтезе:
пренебрегаем
влиянием обратной связи по э.д.с.
двигателя, т. е. полагаем eд
= 0. Допущение вполне оправдано, поскольку
изменение скорости (э.д.с.),
как правило, происходит гораздо медленнее
в сравнении с током якоря. В качестве
условия, гарантирующего обоснованность
такого пренебрежения, принимают
следующее:
Tм
10T
. Если это условие не соблюдается, то
пренебрежение влиянием обратной связи
по э.д.с. при синтезе приводит к тому,
что контур тока якоря становится
статическим и электропривод недоиспользуется
по перегрузочной способности при пуске
и торможении. В
этом случае необходимо вводить
компенсацию э.д.с.
двигателя /4/.
Применим типовую методику структурно-параметрического синтеза, рассмотренную выше. Этапы синтеза:
Параметрическая декомпозиция объекта управления:
- большие постоянные времени (БПВ): Tэ ;
- малые постоянные времени (МПВ): Tтп , Tфрт , Tфдт ;
- эквивалентная малая постоянная времени контура (ЭМПВ):
Tт = Tтп + Tфрт + Tфдт ;
Задание критерия качества в виде желаемой передаточной функции разомкнутого контура (настройку замкнутого контура регулирования тока якоря будем осуществлять на технический оптимум - ТО):
![]()
Синтез структуры и параметров регулятора.
- Передаточная функция регулятора тока якоря

таким образом, структура регулятора тока - ПИ, обеспечивает компенсацию одной БПВ - Tэ ;
- Параметры регулятора тока:
-
коэффициент
передачи регулятора
![]()
-
постоянная
времени интегрирования
![]()
- постоянная времени изодромного звена Tиз = Tэ ;
заметим, что здесь имеют место лишь 2 независимых параметра, поскольку Kрт = Tиз / Tи .
Расчет параметров регулятора.
Большинство регуляторов реализуются на основе операционных усилителей в интегральном исполнении. В системах управления электроприводами наибольшее применение нашли серии микросхем К140
(К140УД5, К140УД6, К140УД7, К140УД8, К140УД14), К153 (К153УД1, К153УД 2), КР553 (КР553УД1, КР553УД2), КР157 (КР157УД1, КР157УД2) и др.). Питание этих микросхем унифицировано - 15 В.
Принципиальная схема регулятора тока на основе операционного усилителя приведена на рис. 8.6. Расчету подлежат значения резисторов Rзт, Rот, Rт и емкости конденсатора Cот, а также величина напряжения Uзт , обеспечивающего ограничение тока якоря на допустимом уровне. Заметим, что число параметров принципиальной схемы регулятора (их 5) значительно превышает число независимых параметров регулятора, полученных в результате синтеза (их только 2). Очевидно, что неоходимо задаться какими-то тремя параметрами, условиями или соотношениями. Введем следующие допущения:
а) зададимся значением емкости Cот в пределах (1…2)10-6 фарады;
б) примем, что максимальное напряжение задания, обеспечивающее ограничение тока якоря на допустимом уровне, Uзт, max = 10 В, т.е. несколько меньше напряжения насыщения операционных усилителей; фактически заданием этого напряжения мы однозначно определяем величину контурного коэффициента усиления, т. е. 1 / Kт = imax / Uзт, max = imax / 10 .
в) используем соотношения, справедливые для статических режимов любых операционных усилителей перечисленных серий (с собственным коэффициентом передачи свыше 20000):
 Uзт,
max/Rзт=Uдт, max/
Rт=Kт /Kдт.
Uзт,
max/Rзт=Uдт, max/
Rт=Kт /Kдт.
Тогда порядок расчета резисторов будет следующим:
1. Rот = Tиз / Cот = Tэ / Cот .
2. Rзт=Tи / Cот= 2 Tт Kтп Kт / Rэ Cот = Kт Rт / Kдт ,
откуда Rт = 2 Tт Kтп Kдт / Rэ Cот .
Rзт = Rт Uзт, max / Uдт, max ,
где Uдт, max = Kдт imax , Uдт, max 10 В.
Если рассчитанные величины резисторов Rзт и Rт окажутся менее
1 кОм, необходимо изменить соответствующим образом значение Cот .
Примечание: величины резисторов и емкостей выбираются из стандартных рядов.
Передаточная функция синтезированного замкнутого контура регулирования тока якоря (ЗКРТ), настроенного на технический оптимум, имеет вид:
![]()
где Tт - постоянная времени замкнутого контура тока якоря, аппроксимированного апериодическим звеном 1-го порядка, Tт = 2 Tт . Величина Tт зависит, прежде всего, от пульсности тиристорного преобразователя и обычно находится в пределах 0,01…0,03с.