Экзамен - Шпаргалки - 2004 / шпоры1
.doc|
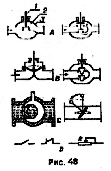
Регулирующие органы САР. Это конечные элементы САР с помощью которого изменяются потоки материальные и энергетические. Задача регулирующего органа изменить количественный параметр таким образом, чтобы вернуть качественный параметр (чтобы качественный параметр Т,с,р Вернулся в заданное значение. Разновидности регулирующих органов( рис 48) На этом рисунке приведены разновидности регулирующих органов для жидких, газообразных сред(потоков) и электрических. Для регулирования расхода твёрдых или сыпучих сред используют дозаторы. Слева
односидельный, справа двухсидельный
клапан. Слева
мембранный, справа чашечный
двухсидельный. Слева
шаровой справа поворотная заслонка Реохорд,
контактная пара, резистр электрические
устройства |
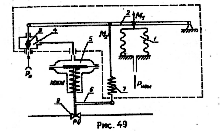
Позиционеры(рис 49) - мембранных регуляторов: маленькая мощность, чтобы его устранить используют усилитель мощности – позиционер. Так как от командного элемента поступает Р=0,02МПа(это мало но улавливать их надо) поэтому используют позиционер.
Давление сжатого воздуха поступает не на мембрану ИМ, а в сильфон 1, который связан с рычагом преобразующим его в расширение в момент М1, который вызывает изменения положения золотника 3, в золотниковой камере 4, куда поступает мощный поток воздуха от компрессора и этот поток воздуха пропорциональный Ркам уже идёт на мембрану ИМ. Для обеспечения точной перестановки в соответствии с командным давлением. |
в) когда о.о связь: W
Чтобы получить ПН закон то подставляем реальное дифференциальное звено вниз Wос=TsS/TS+1 W(S) = T/TS+1/TsS
Основные разновидности регуляторов. 1 По (измеряемому)регулируемому параметру 2 По закону регулирования, т.е зависимость между изменением положения регулирующего клапана. Существует 5 линейных или аналоговых регуляторов и позиционные регуляторы(линейные) 3 По непрерывности выходного сигнала(5 аналоговых и релейные регуляторы) 4 По источнику энергии т.е откуда идёт энергия для перемещения регулируемого клапана: прямого и непрямого действияю Регуляторы прямого действия это те у которых я для приостановки регулирующего клапана используется энергия регулируемого параметра (рис 52) Регуляторы непрямого действия это те регуляторы у которых энергия берёться из вне для перемещения регулирующего клапана (рис 53) Они сами делятся по виду энергии: пневматические (в химической технологии) Электрические (самые распространённые) Гидравлические (используют редко, нельзя передавать на расстояние) 5 По конструкции: аппаратные, приборные, блочно-модульные.
|
|
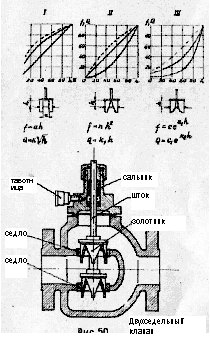
Статические характеристики регулирующих органов(рис 50)
|
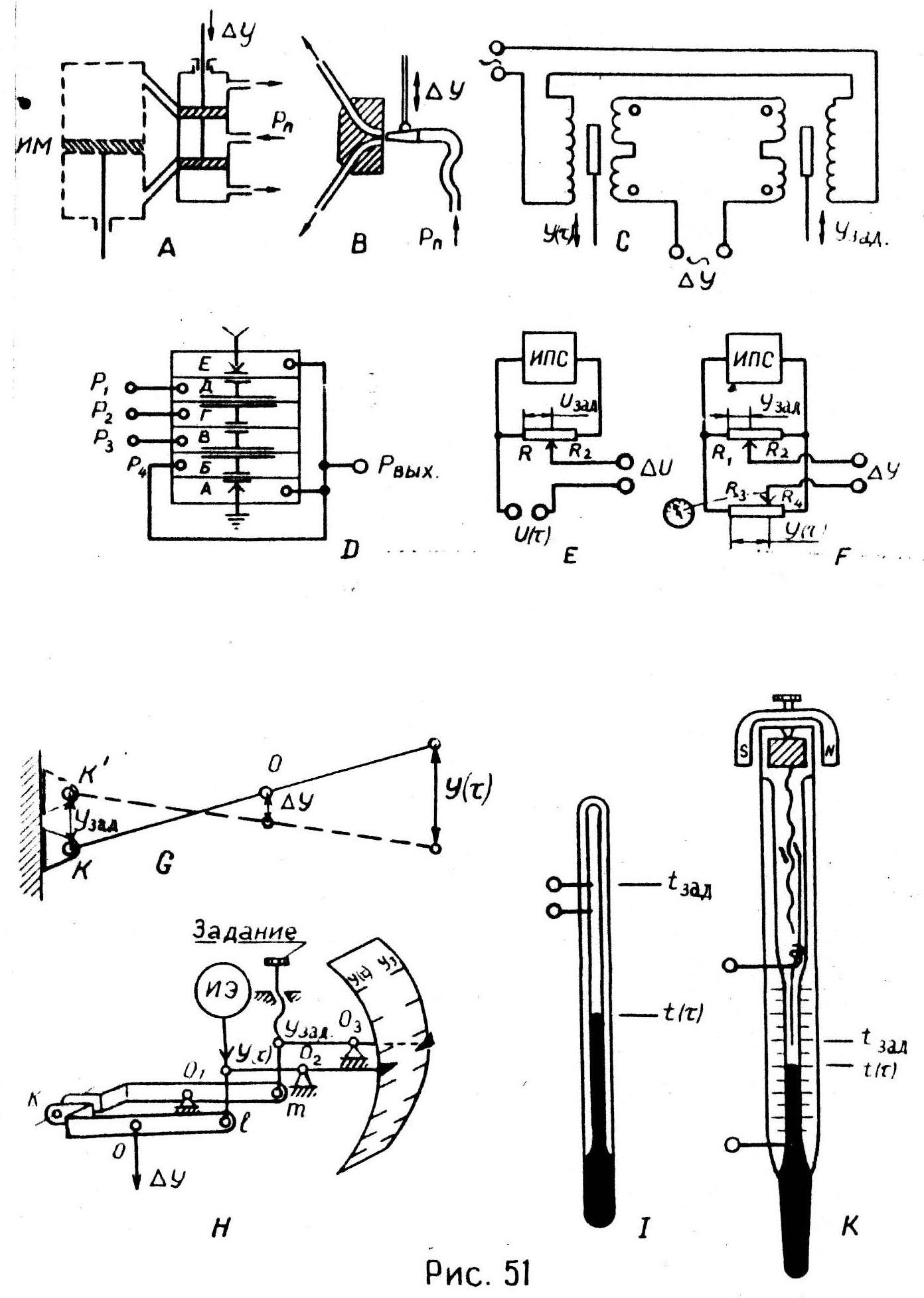
Управляющие (командные) элементы. Особенностью регулятора является то, что у него 2 входных сигнала, один соответствующий текущему параметру, а второй соответствует заданному значению параметра. Также он выполняет 2 основных функции: 1 сравнение текущего значения параметра с заданным значением и оценка; 2 формирование управляющего сигнала по определённому закону регулирования, т.е либо пропорциональный регулятор, либо интегральный регулятор, пока φтеор = φзадан., либо сложный регулятор. На рис 51 представлены разновидности командных элементов и дополнительные функции: а) преобразование типа сигнала; б) определение требуемой мощности(т.е усиление этого сигнала). По виду энергии они могут быть: электрич, пневманич, гидравлич. Сам этот регулятор должен быть по месту.
|
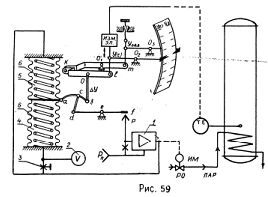
Приборные регуляторы Функциональная часть прибора(самописцы, сигнализаторы, интегрирующие устройства) дополняется командным элементом. В командном элементе всегда должны быть 2 стрелочки: 1 стрелка- з
На рис 59: 3)аналоговый или линейный; 6)пневматический; 7)приборный; 2) ПИ регулятор; 5)непрямого действия; 1)регулятор температуры; 4)непрерывный сигнал.
|
|
Исполнительные механизмы САР И
Наибольшее распространение имеют пневматические исполнительные механизмы( рис 47а) и называются мембранными. Основной элемент это мембрана с жёстким металлическим центром, при увеличении давления она прогибается пропорционально давлению и перемещает шток на котором сидит регулирующий орган. Н
Н
С– реверсивный асинхронный двигатель. Регулятор релейный: 1пара ротор вращается в одну сторону, 2пара в другую. Д-солиноидный ИМ.
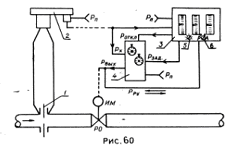
Примером является рис 60
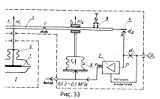
- блочно-модульный пневматический регулятор 1) Первичный измерительный преобразователь сужающийся клапан(устройство) и дифманометр 2) Нормирующий преобразователь-это слепой прибор рис 33 пневматический выводит Р сжатого воздуха. 3) Измерительный прибор (меряет давление сжатого воздуха, а пишет расход ). 4) Регулирующий блок Примером электрических блочно-модульных преобразователей: Рис 62 2
3. Нормирующий преобразоавтель токовый ( слепой) |
Рис 51(а)-гидравлический командный элемент, интегральный закон регулирования; ПП-давление трансформаторного масла. Давление возрастает и поршень поднимается. Рис 51(G,H)-механические элементы сравнения(текущего с заданным) Рис 51(BD)-пневматические командные элементы и давление сжатого воздуха используется как для сигнала входного, для текущего значения и выходного для заданного значения. Применим для пожаровзрывоопасных производств. Рис 51(CFE)-электрические командные элементы: C-дифференциальный трансформаторный командный элемент (КЭ); E-потенциометрический КЭ; F-реостатный КЭ Рис 51 (IK)-контактные термометры: I-с фиксированной заданной температурой; K-с подвижной заданной температурой. Способы реализации основных законов регулирования Реализация
закона регулирования формируется
путём комбинацией простых динамических
звеньев. 1 способ:
п
2способ:использованиеобратных связей: а)положительная связь W(S) =((1/TaS+1)/(1-(1/TaS+1)))=K/TS+1 б) для получения интегрального закона регулирования берут статическое звено
W(S) =((1/TS+1)/(1-(1/TS+1)))=1/TS
|
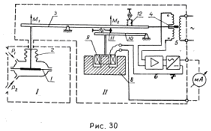
Агрегатные или блочно-модульные регуляторы самые современные регуляторы особенностью которых является что: - в качестве сигнала идёт унифицированный сигнал либо пневматический меняются от 0,2-0,1МПа или электрический меняются от 0-5мА - измерительная система состоит из 2 элементов: а)первичный преобразователь или чувствительный элемент, задача которого преобразовывать параметр(Р,Т) в соответствующий физический сигнал; б) нормирующий преобразователь рис 30 вырабатывает электрический токовый, вырабатывает сигнал 0-5 мА
рис 33 пневматический 0,02-0,1 МПа
А далее используются одни и те же блоки независимо от регулированного параметра, измерительные блоки, регулирующие и вспомогательные блоки. |
|
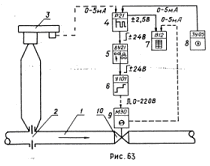
Рис 63
На нём показан релейный (позиционный регулятор с тем же набором блоков) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|