

kurs_rabota
.pdf11
Структурные преобразования. Для удобства расчетов автоматических систем бывает необходимо преобразовывать структурную схему системы к простому и удобному для расчетов виду.
Группу динамических звеньев, составляющих то или иное соединение, можно представить одним эквивалентным динамическим звеном, обладающим такими же статическими и динамическими характеристиками, что и замещаемое им соединение. Это позволяет упрощать алгоритмические схемы.
В структурных схемах автоматических систем встречаются всего три типа соединений динамических звеньев:
–последовательное;
–параллельное;
–встречно-параллельное (соединение с обратной связью). Последовательным называется такое соединение двух или несколь-
ких звеньев, при котором выходная величина предыдущего звена является входной величиной для последующего (рисунок 4).
X(p) |
|
|
Y1(p) |
|
Y2(p) |
|
Y(p) |
W1(p) |
|
W2(p) |
Wk(p) |
||||
|
|
|
|
|
|||
|
|
|
|
||||
|
|
|
|
|
|
|
|
Рисунок 4 – Последовательное соединение звеньев
Из определения передаточной функции звена можно найти эквивалентную передаточную функцию последовательного соединения:
W ( p) = YX ((pp))
Поскольку:
Y1 (p)= X (p) W1 (p) ; Y2 (p)=Y1 (p) W2 (p) ;
...
Y (p)=Yk −1 (p) Wk (p) ,
то исключая промежуточные переменные, получим:
W (p)=W1 (p) W2 (p) ... Wk (p).
Таким образом, последовательное соединение звеньев эквива-
лентно одному звену, передаточная функция которого равна произведению передаточных функций последовательно соединенных звеньев.

12
Последовательно соединенные звенья можно менять местами без изменения общей передаточной функции цепи.
Параллельным называется такое соединение двух или нескольких звеньев, при котором входная величина у всех звеньев одна и та же, а выходные величины складываются (рисунок 5).
Y1(p)
 W1(p)
W1(p)
X(p) 
 Y2(p) Y(p)
Y2(p) Y(p)
W2(p) 
Yk(p)
 Wk(p)
Wk(p) 
Рисунок 5 – Параллельное соединение звеньев
Учитывая, что при параллельном соединении выходные величины элементов складываются, т. е.
Y (p)=Y1 (p)+Y2 (p)+...+Yk (p).
Y1 (p) = X (p) W1 (p); Y2 (p)= X (p) W2 (p);
...
Y (p)= X (p) Wk (p),
то
W (p)= Y ((p)) = Y1 (p)+Y2 (p()+)...+Yk (p) = Y1 ((p))+ Y2 ((p))+...+ Yk ((p)) = X p X p X p X p X p
=W1 (p)+W2 (p)+...+Wk (p).
Отсюда следует, что параллельное соединение звеньев эквива-
лентно одному звену, передаточная функция которого равна сумме передаточных функций параллельно соединенных звеньев.

13
Встречно-параллельным называется такое соединение двух звеньев, при котором выходная величина одного звена подается обратно на его вход через другое звено (рисунок 6).
а) |
G(p) |
|
|
X(p) |
|
|
Y(p) |
|||
|
|
|
|
|
|
|
Wпр(p) |
|
|
|
|
|
|
|
(–) |
|
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
Yoc(p) |
|
|
|
|
||
|
|
|
Wос(p) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
б) |
G(p) |
|
|
|
|
|
|
Y(p) |
||
|
|
|
|
|
|
|
||||
|
|
|
Wпр(p) |
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
1+Wпр(p)Wос(p) |
|
|
|
|||
а – звено, охваченное обратной связью; б – эквивалентная структурная схема звена
Рисунок 6 – Встречно-параллельное соединение
Встречно-параллельное соединение часто называется соединением с обратной связью. При этом звено, стоящее в прямой цепи (звено с передаточной функцией Wпр(p)), является звеном, охватываемым обратной связью, а звено, стоящее в цепи обратной связи (звено с передаточной функцией Wос(p)), звеном в цепи обратной связи. Изображение обратной связи Yос(p) вычитается из изображения входной величины G(p) встречнопараллельного соединения или складывается с ней. В первом случае имеет место отрицательная обратная связь, а во втором – положительная обратная связь.
При отрицательной обратной связи на вход звена, охватываемого обратной связью, поступает сигнал X(p) = G(p) – YОС(p); при положительной
обратной связи – сигнал X(p) = G(p) + YОС(p).
Отрицательная обратная связь широко применяется в автоматике для обеспечения устойчивости систем, стабилизации движения объектов, уменьшения чувствительности систем к возмущениям и изменению параметров элементов.
Положительная обратная связь служит для генерирования незатухающих колебаний и увеличения коэффициента усиления устройств.
Найдем соотношение, связывающее изображения выходной Y(p) и входной G(p) величин при встречно-параллельном соединении звеньев.
Изображение выходной величины
Y (p)= X (p) WПР (p).
14
Для отрицательной обратной связи
X (p)=G (p)−YОС (p)= G( p) −Y (p) WОС (p).
Подставим X(p) в выражение для Y(p):
Y (p)= G (p)−Y (p) WOC (p) WПР (p) ,
значит
Y (p) 1+WOC (p)WПР (p) = G (p) WПР (p).
Отсюда |
|
|
|
|
(p) |
|
|
Y (p)= G (p) |
|
|
WПР |
|
|||
1 |
+W (p) W |
(p) |
|||||
|
|
|
|
ПР |
ОС |
|
|
или |
|
|
|
|
|
|
|
Y (p)=G(p)Φ(p), |
|
||||||
где |
|
|
|
Wпр (p) |
|
|
|
Φ(p)= |
|
|
|
|
. |
||
1+W (p) W (p) |
|||||||
|
|
|
|
пр |
ос |
|
|
Следовательно, звено с передаточной функцией Wпр(p), охваченное отрицательной обратной связью через звено с передаточной функцией Wос(p), в отношении прохождения сигнала эквивалентно одному звену, передаточная функция которого равна передаточной функции звена, охватываемого обратной связью, деленной на единицу плюс произведение передаточных функций звеньев, входящих в соединение (см. рисунок 6, б).
Для случая положительной обратной связи
Φ(p)= |
WПР (p) |
|
|
. |
|
1−WПР (p) WОС (p) |
||
В общем случае САР может включать в себя комбинации всех трех рассмотренных случаев. Пользуясь полученными здесь формулами можно находить результирующую передаточную функцию и для сложных систем.
15
3 Передаточные функции САР
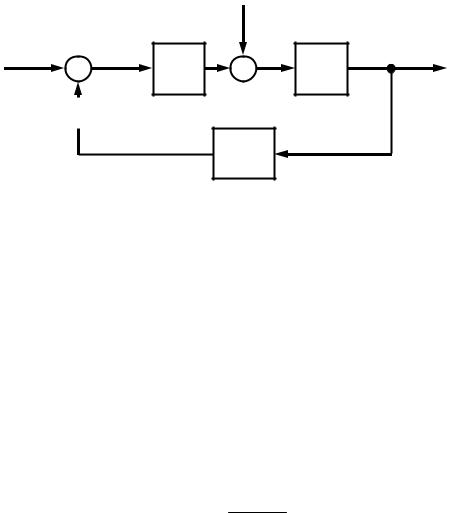
Общим методом исследования САР является преобразование структурной схемы в эквивалентную одноконтурную, для которой нахождение передаточных функций не вызывает затруднений. Поэтому структурная схема любой САР обычно приводится к виду, показанному на рисунке 7. Здесь для упрощения показано лишь одно возмущающее воздействие F(p), приложенное к системе. В общем случае число возмущающих воздействий может быть любым.
|
|
F(p) |
G(p) |
X(p) |
Y(p) |
|
WA(p) |
WB(p) |
|
≈ (–) |
|
|
YОС(p) |
WOC(p) |
|
|
|
Рисунок 7 – Структурная схема одноконтурной CAP |
||
Для расчетов обычно необходимы передаточные функции:
–разомкнутой CAP W(p);
–замкнутой CAP относительно задающего воздействия Φ(p);
–замкнутой CAP относительно возмущения Φf(p);
–замкнутой CAP для ошибки воспроизведения задания Φx(p);
–замкнутой CAP для ошибки от возмущающего воздействия Φxf(p). Определим, что представляют собой эти передаточные функции, и
найдем их значения для одноконтурной CAP, показанной на рисунке 7.
Передаточная функция разомкнутой CAP W(p)
W (p)= YOC((p))
X p
есть отношение изображения YOC(p) сигнала обратной связи yOC(t) к изображению X(p) сигнала ошибки x(t) (все возмущающие воздействия при этом считаются равными нулю). Контур регулирования считают разомкнутым около элемента сравнения, как показано на рисунке 7 волнистыми линиями:
W (p)=WA WB WOC .

16
Передаточная функция W(p) характеризует собственные динамические свойства системы и позволяет определить ее устойчивость, а также выбрать корректирующие устройства для улучшения свойств системы. Передаточная функция разомкнутой системы имеет весьма большое значение в теории автоматического управления, так как многие методы анализа и синтеза основаны на использовании именно этой функции.
Передаточная функция замкнутой CAP относительно задающе-
го воздействия Φ(p) есть отношение изображения Y(p) регулируемой величины к изображению задающего воздействия G(p); при этом предполагается, что других внешних воздействий нет. Передаточную функцию Φ(p)
еще называют главным оператором системы:
Ф(p)= GY ((pp)).
Для CAP, изображенной на рисунке 7,
Ф(p)= |
|
WA (p) WB (p) |
|
. |
|
1+W |
(p) W |
(p) W |
(p) |
||
|
A |
B |
OC |
|
|
Передаточная функция Φ(p) характеризует передачу задающего воздействия на выход системы.
Передаточная функция замкнутой CAP для ошибки воспроизведения задания
ФX (p)= X ((p))
G p
есть отношение изображения X(p) ошибки x(t) = g(t) – yОС(t) к изображению задающего воздействия G(p) при отсутствии других внешних воздействий.
У рассматриваемой системы |
|
|
||||
ФX (p)= |
|
|
1 |
|
. |
|
1 |
+WA (p) WB |
(p) WOC (p) |
||||
|
|
|||||
Передаточная функция ΦX(p), как и Φ(p), характеризует воспроизведение регулируемой величиной задающего воздействия (отработку задания). Воспроизведение тем лучше, чем ближе значение ΦX(p) к идеально-
му: ΦX(p) = 0.

17
Передаточная функция замкнутой CAP относительно возмуще-
ния
Фf (p)= YF ((pp))
есть отношение изображения Y(p) регулируемой величины к изображению F(p) возмущения. При этом предполагают, что других внешних воздействий нет.
Для рассматриваемой системы
Фf (p)= |
|
|
WB (p) |
. |
|
1 |
+WA (p) WB (p) WOC (p) |
||||
|
|
||||
Передаточная функция Φf(p) показывает влияние возмущения f(t) на регулируемую величину y(t). Возмущение стремится отклонить ее от заданного значения и уменьшает точность воспроизведения задающего воздействия. Это вредное влияние возмущения тем меньше, чем ближе значение Φf(p) к идеальному: Φf(p) = 0.
Если на систему воздействует несколько возмущений f1, f2, ..., fn, то определяются передаточные функции Φf1(p), Φf2(p), ..., Φfn(p) относительно каждого из них.
Передаточная функция замкнутой CAP для ошибки от возмущающего воздействия
ФXf (p)= X ((p))
F p
есть отношение изображения ошибки X(p) к изображению возмущающего воздействия F(p) при отсутствии других внешних воздействий.
Для данной системы
ФXf (p)= |
|
|
−WB (p) WOC (p) |
. |
|
1 |
+WA (p) WB (p) WOC (p) |
||||
|
|
||||
Передаточная функция ΦXf(p) характеризует влияние возмущения на величину ошибки. В идеале ΦXf(p) = 0.
18
4 Устойчивость САР
Устойчивость является одним из главных требований, предъявляемых к автоматическим системам.
Система автоматического управления называется устойчивой, если она, будучи выведена из состояния равновесия и в дальнейшем не подвергаясь никаким внешним воздействиям, с течением времени стремится вернуться в прежнее состояние равновесия.
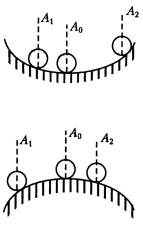
Иллюстрация понятия устойчивости приведена на рисунке 8. Состояние равновесия шара в точке А0 (рисунок 8, а) устойчиво, так как если какие-либо внешние силы выведут шар из этого состояния (например, в точку А1 или А2), то он возвратится к точке А0. Состояние равновесия в точке А0 (рисунок 8, б) неустойчиво.
а)
б)
Рисунок 8 – К понятию устойчивости
В этом примере, как и в теории устойчивости, полагается, что внешние силы или возмущения прекращают свое действие к некоторому моменту времени, который можно принять за начальный момент t = 0.
Автоматические системы отличаются тем, что в них осуществляется специально организованное управление объектом. Благодаря регулятору, система с неустойчивым объектом может стать устойчивой, а система с устойчивым объектом (при неправильном управлении) – неустойчивой.
Строгая математическая теория устойчивости была создана А. И. Ляпуновым и изложена им в работе «Общая задача об устойчивости движения», опубликованной в 1892 г. В ней было определено понятие устойчивости и разработаны методы определения устойчивости нелинейных систем.
19
Математический признак устойчивости. Первая теорема А. М. Ляпунова.
1 Для обеспечения устойчивости САР, описываемой линейными дифференциальными уравнениями с постоянными коэффициентами, необходимо и достаточно, чтобы вещественные корни характеристического уравнения были отрицательными, а комплексные корни имели отрицательную вещественную часть.
2 Если вещественная часть корней меньше нуля, но среди корней имеются нулевые или чисто мнимые корни, то система стремится к некоторому установившемуся процессу (консервативная система).
3 Если есть хотя бы один положительный вещественный корень или положительная вещественная часть хотя бы одного комплексного корня, то система неустойчива.
Характеристическое уравнение САР имеет вид:
Dn(p) = 0,
где Dn(p) – знаменатель любой передаточной функции замкнутой системы, так что корни pi характеристического уравнения звена являются полюсами его передаточных функций.
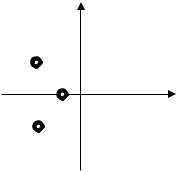
Таким образом, устойчивость САР определяется расположением корней характеристического уравнения на комплексной плоскости (рису-
нок 9).
Im
Устойчивая система
Re
Рисунок 9 – Размещение на комплексной плоскости корней устойчивой системы
Прямой метод анализа устойчивости систем, основанный на вычислении корней характеристического уравнения, очень сложен, особенно для уравнений высоких степеней. Поэтому в инженерной практике используют методы, которые позволяют определять устойчивость системы без вычисления корней. Эти методы называются критериями устойчивости. С помощью критериев устойчивости можно не только установить, является ли система устойчивой или нет, но и выяснить, как влияют на устойчивость те или иные параметры и структурные изменения в системе.
Различают две группы критериев устойчивости: алгебраические (Гурвица), основанные на анализе коэффициентов характеристического
20
уравнения, и частотные (Михайлова и Найквиста), основанные на анализе частотных характеристик. Частотные критерии позволяют оценивать устойчивость системы, даже если в наличии имеются экспериментальные частотные характеристики, а уравнения динамики неизвестны.
Наиболее простым и удобным для практического применения является критерий Гурвица, который позволяет определить, где на комплексной плоскости расположены корни характеристического уравнения, не решая само уравнение.
Определение критерия: для того, чтобы САР была устойчива, необходимо и достаточно, чтобы главный определитель Гурвица и его диагональные миноры, составленные из коэффициентов характеристического уравнения, были положительными, т. е.
n > 0; n−1 > 0; n−2 > 0; ... 1 > 0 .
Положим, имеется характеристическое уравнение САР (характеристическое уравнение – знаменатель передаточной функции Φ(p)):
dn pn +dn−1 pn−1 +...+d1 p +d0 =0 .
Из коэффициентов d0, d1, …dn-1 составляется определитель Гурвица порядка n по следующему правилу: по главной диагонали определителя слева направо сверху вниз выписываются все коэффициенты характеристического уравнения от d0 до dn-1 в порядке возрастания индекса.
Столбцы вверх от главной диагонали дополняются коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – с последовательно убывающими индексами.
На место коэффициентов с индексами больше n (где n – порядок характеристического уравнения) и меньше нуля проставляются нули:
|
d0 |
d2 |
d4 |
d6 ... |
0 |
|
|
|
|
||||||
|
0 |
d1 |
d3 |
d5 ... |
0 |
|
|
n = |
0 |
d0 |
d2 |
d4 ... |
0 |
. |
|
0 |
0 |
d1 |
d3 ... |
0 |
|||
|
|
||||||
|
... ... ... ... ... |
dn |
|
||||
|
0 |
0 |
0 |
0 ... |
dn−1 |
|
|