

Борисенко / Конспект лекций / Лекция 9
.docЛекция 9
ЛЕКЦИЯ 9
ВОЛНОВЫЕ ПЕРЕДАЧИ
9.1 Устройство волновых передач
Волновая передача основана на принципе преобразования движения путем волнового деформирования одного из звеньев механизма. Обладая рядом положительных качеств, волновая передача получает широкое распространение и применяется в том числе и в мехатронике.
Рассмотрим принцип ее действия на фрикционном варианте волновой передачи (рисунок 55).
Передача состоит из трех звеньев: гибкого колеса g, жесткого колеса b и генератора волн деформации h. Наружный диаметр недеформированного гибкого колеса меньше внутреннего диаметра жесткого колеса.
Гибкое колесо выполнено в виде кольца, переходящего в гибкий цилиндр, который выполняет роль упругой связи деформируемого кольца с ведомым валом или с корпусом.
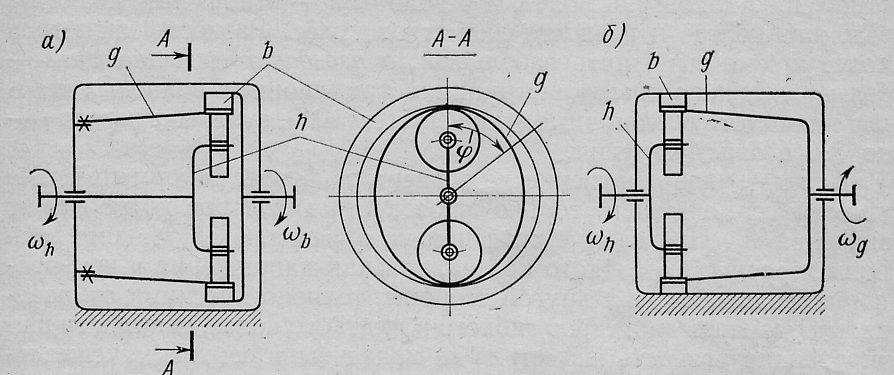
Рисунок 55- Схема волновой передачи
В фрикционном варианте передачи генератор h устроен так, чтобы деформированное гибкое колесо прижималось к жесткому колесу с силой, достаточной для передачи нагрузки путем трения.
Вращение генератора h с угловой скоростью wh вызывает вращение гибкого колеса с угловой скоростью wg (схема б).
В волновой зубчатой передаче (рисунок 56) гибкое колесо имеет наружные зубья, а жесткое колесо – внутренние зубья.

Рисунок 56- Волновая зубчатая передача
Передаточное отношение не зависит от формы деформации гибкого колеса, а зависит только от разности диаметров колес. Поскольку модуль зубьев одинаков в данном случае передаточное отношение зависит от разности чисел зубьев. При полном обегании генератором поверхности гибкого колеса оно повернется на угол соответствующий разнице чисел зубьев гибкого и жесткого колес, откуда и определится передаточное отношение .
Легче всего вывести формулу для определения передаточного отношения исходя из аналогии с планетарной передачей схемы K-H-V (рисунок 57).
На рисунке представлена схема волновой передачи ее планетарный аналог. Волновая передача на схеме а эквивалентна планетарной передаче на схеме б, у которой число зубьев сателлита равно числу зубьев гибкого колеса.
Для планетарного механизма
iH12 = (w1 - wH) / (w2 - wH) = z2 / z1
откуда
iпл = wH/ w1 = 1 / ( 1 - z2 / z1).
При малой разности чисел зубьев ( в волновых передачах она обычно равна 2) получается большое и имеет отрицательный знак, т.е. направление вращения генератора волновой передачи и направление вращения гибкого колеса противоположны.
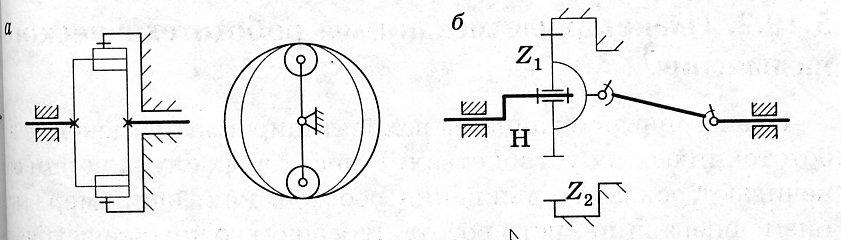
Рисунок 57- Волновая зубчатая передача и ее планетарный аналог
Из-за недопустимости больших деформаций гибкого колеса по соображениям прочности передаточное отношение ограничено снизу и не должно быть меньше 80. Верхнее значение передаточного отношения ограничено габаритами колес, по этой причине оно не превышает 250-300.
Незначительная разность диаметров колес в сочетании с податливостью гибкого колеса позволяет получать большое число зубьев в одновременном зацеплении( до 30-40 % от числа зубьев жесткого колеса) Например , при передаточном отношении 100 и числе зубьев жесткого колеса получим 60-80 пар зубьев одновременном зацеплении вместо 1-2 пар в простой зубчатой передаче. Следствием многопарности зацепления является небольшая масс и габариты, высокая кинематическая точность.
Первая волновая передача , предложенная в 1944 г. А.И. Москвитиным , была с электромагнитным генератором. Принципиальная схема передачи изображена на рисунке 58
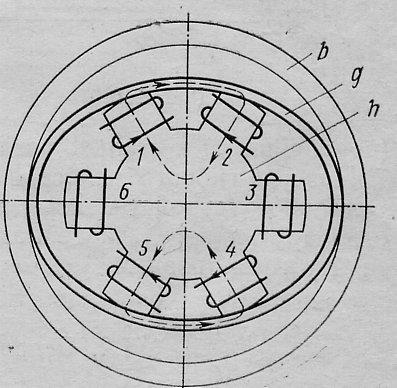
Рисунок 58- Первая волновая передача
Передача была фрикционной. Она совмещала в себе функции двигателя и передачи. Она известна под названием «респонсин». Серьезным недостатком такой передачи является низкий КПД не превышающий 6-8% . Передача нашла применение в следящих системах.
Волновую зубчатую передачу в 1959 году в США изобрел инженер В. Массер.
На рисунке 59 изображена принципиальная схема так называемой герметичной волновой передачи, она может передавать движение в герметизированное пространство без подвижных уплотнений (сальников).Ни одна другая передача не позволяет так просто и надежно решать задачу герметизации.
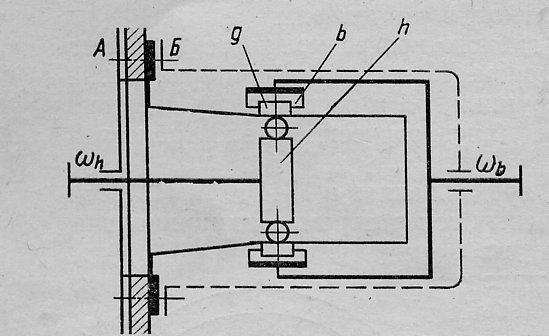
Рисунок 59- Герметичная волновая передача
9.2 Конструкция волновых передач
Гибкие элементы, получающие циклическую деформацию со стороны генератора волн, являются наиболее ответственными элементами волновых передач, определяющими их нагрузочную способность и долговечность.
Основые параметры волновых передач зависят от конструктивных особенностей гибких элементов. Гибкие элементы волновых передач наиболее часто изготавливаются из стали. Иногда их выполняют из бронзы, резины и синтетических материалов. Материалы , применяемые для гибких элементов , должны иметь высокие пределы выносливости и упругости. Кроме того, одним из требований , предъявляемым к герметезирующим гибким элементам , является антикоррозионная стойкость против изолируемой агрессивной среды. Важным показателем является также работоспособность в условиях повышенных и пониженных температур, наконец, большое значение имеют технологические свойства материалов(свариваемость, возможность термообработки, вытяжки, обрабатываемость).
Для гибких элементов силовых волновых передач в основном применяются подшипниковые стали (например ШХ15) и пружинные или конструкционные легированные стали.
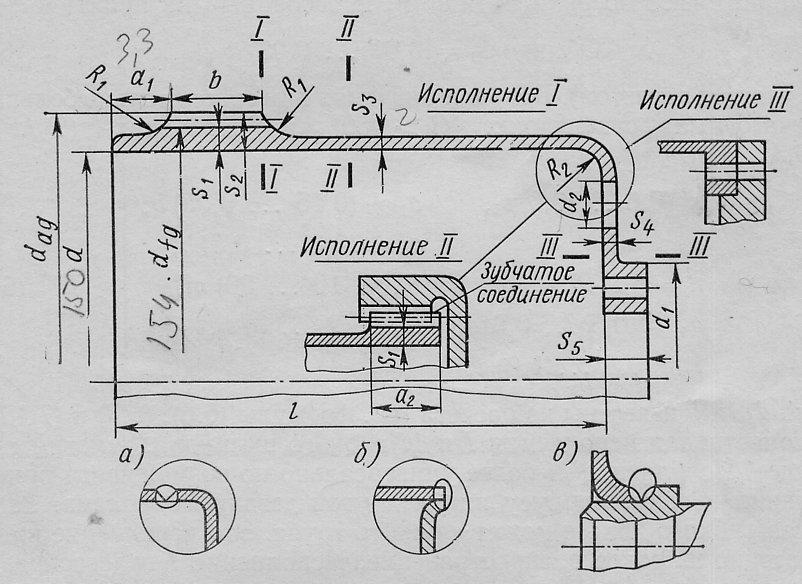
Рисунок 60- Наиболее распространенная конструкция гибкого колеса
Гибкие элементы волновых передач обычно представляют собой тонкостенные тела вращения цилиндрической, конической, сферической или гиперболической формы. Из-за большей технологичности распространение получили гибкие элементы цилиндрической формы. Наряду со сплошными гибкими элементами , с целью повышения их гибкости, применяются составные гибкие звенья в виде отдельных зубчатых сегментов, звеньев втулочных или зубчатых цепей или плоскозубчатых ремней (рисунок 61).
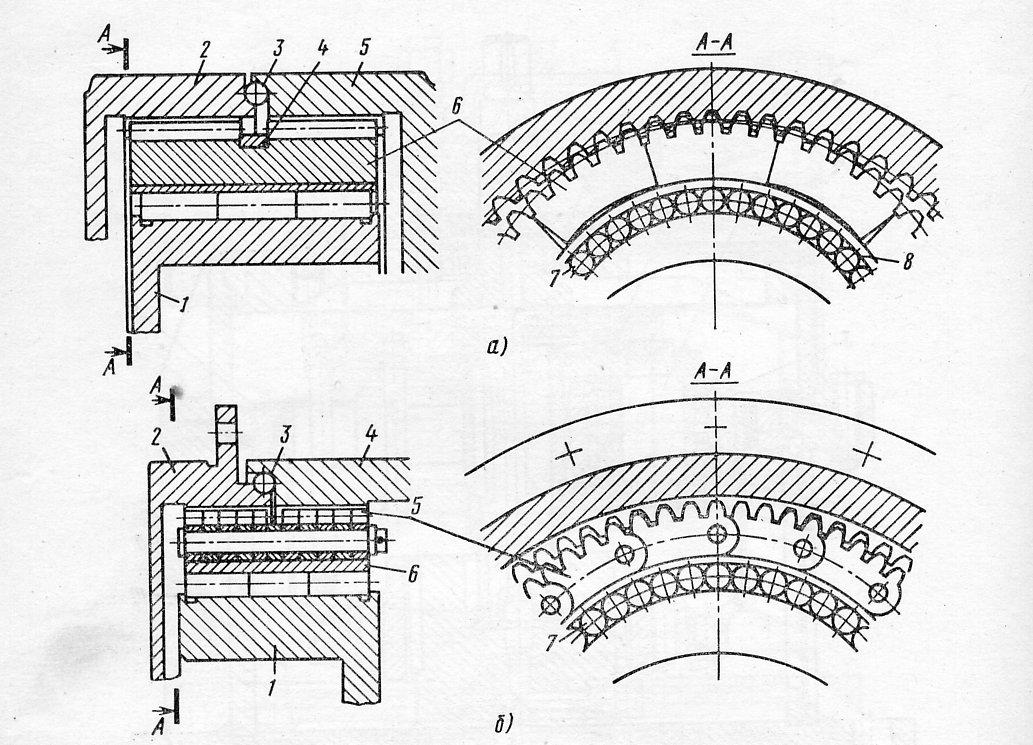
Рисунок 61- Составное гибкое звено
Гибкие элементы волновых передач относятся к тонкостенным оболочкам. При конструировании волновых передач рекомендуется выдерживать относительную толщину стальных оболочек в следующих пределах:
0,01<d/r0< 0,025.
Здесь d/r0 – относительная толщина оболочки, d - толщина стенки оболочки, r0 – радиус кривизны срединной поверхности оболочки.
Высота зубчатой нарезки на гибком элементе должна быть меньше удвоенной толщины оболочки. Длину оболочки принимают примерно раной или меньше диаметра оболочки.
Радиальная деформация W гибких элементов волновых передач в рабочей зоне сравнима с толщиной оболочки и лежит примерно в следующих пределах:
0,2d <W< 5 d.
Для двухволновых передач с разницей чисел зубьев , равной двум при i>80 Радиальная деформация равна
W <0,01 d0,
где d0 – диаметр кривизны срединной поверхности оболочки в ее рабочем сечении.
Наиболее часто в волновых зубчатых передачах применяется стандартное эвольвентное зацепление, как правило выполненное со смещением. Обычно модуль зубьев находится в пределах 0.3 – 1 мм.
Наряду с гибким элементом генератор является одним из наиболее ответственных звеньев волновой передачи. Конструкция генератора в значительной мере определяет КПД передачи, напряженное состояние гибкого элемента, профиль зубьев, кинематическую точность, динамические характеристики, надежность и долговечность передачи.
Наибольшее распространеие получили кулачковые генераторы принудительной деформации. Они обеспечивают опору гибкому элементу по всему его периметру, что позволяет получить оптимальную форму деформации гибкого колеса и сохранит эту форму под рабочей нагрузкой. Обычно между кулачком генератора и гибким кольцом устанавливается так называемый гибкий подшипник – подшипник с тонкими кольцами. Будучи собран с кулачком , генератор принимает его формую. Условия работы такого подшипника значительно тяжелее чем обычного, с кольцами нормальной толщины. На рисунке 62 показана схема нагружения гибкого подшипника двухволнового генератора.
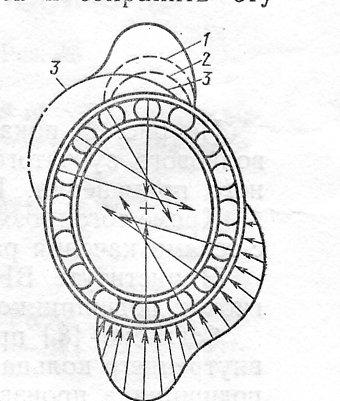
Рисунок 62- Схема нагружения гибкого подшипника
На рисунке 62 показаны эпюры отдельных составляющих нагрузки:
1 – нагрузка, при которой происходит радиальная деформация наружного гибкого кольца подшипника, 2- нагрузка, при которой деформируется гибкое колесо, 3- рабочая нагрузка передачи. Направление усилий со стороны тел качения на кулачок генератора показаны стрелками.
Из рисунка видно, что суммарное усилие на каждой полуволне не проходит через центр кулачка, что в двухволновом генераторе создает момент, который должен быть преодолен крутящим моментом, приложенным к ведущему генератору.
Гибкий подшипник, как правило, должен иметь сепаратор, который часто изготавливается из пластмассы или текстолита.
Внутреннее кольцо гибкого подшипника, не испытывающего циклической деформации, которое насажено на кулачок , можно выполнять более толстым, чем гибкий элемент передачи, а толщину кольца , контактирующего с гибким элементом передачи, т.е испытывающего циклическую деформацию со стороны генератора волн , необходимо выдерживать в тех же пределах, что и для гибких элементов передачи. Для выравнивания усилий со стороны генератора на гибкий элемент генератор может устанавливаться на своем валу с помощью неметаллических, например, резиновых шайб.
Применяются также роликовые генераторы. В качестве роликов могут использоваться стандартные подшипники качения. Главным недостатком этих генераторов является, то что во время работы гибкое колесо не сохраняет заданную форму , так как происходит дополнительный изгиб гибкого элемента перед движущимся кольцом подшипника, все это приводит к сильному снижению долговечности гибкого колеса.
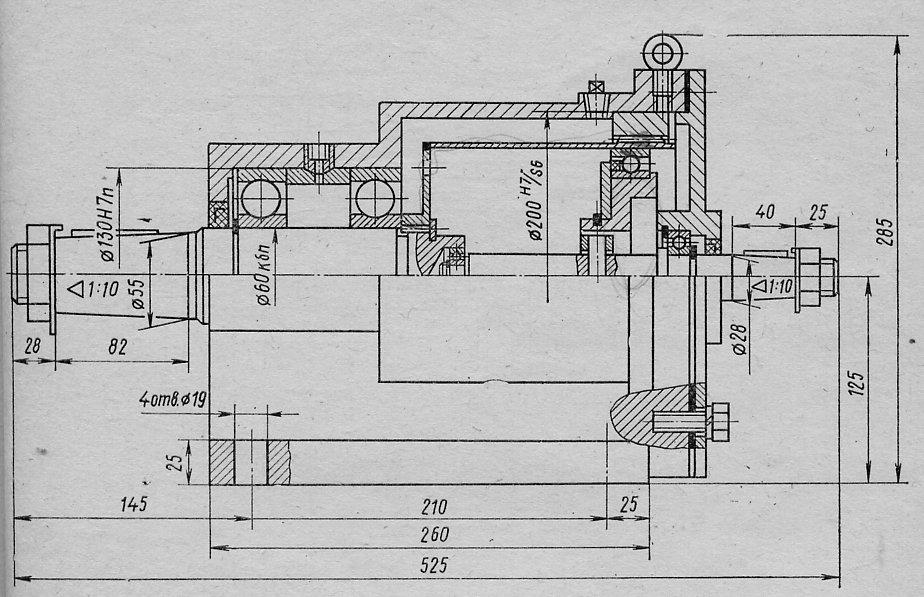
Рисунок 63 – Типовая конструкция из стандартного ряда волновых редукторов