

Лекция 6
СОВРЕМЕННЫЕ МЕХАТРОННЫЕ МОДУЛИ
6.1 Модули движения
Согласно принятой терминологии в модуле движения конструктивно объединены управляемый двигатель и механическое устройство, причем вал двигателя является элементом механического преобразователя движения.
Мотор-редукторы исторически первые по принципу своего построения модули движения, которые стали выпускаться серийно и нашли широкое применение в приводах различных машин. Мотор-редуктор представляет собой компактный конструктивный модуль, объединяющий электродвигатель и редуктор. По сравнению с традиционным соединением двигателя и редуктора через муфту мотор-редукторы обладают целым рядом существенных преимуществ:
-меньшими габаритами,
- сниженной стоимостью за счет сокращения числа присоединительных деталей, уменьшения затрат на установку, наладку и запуск изделия,
- улучшенными эксплуатационными свойствами: минимальным уровнем вибраций, пыле- и влагозащищенностью, безопасностью и надежностью работы в неблагоприятных производственных условиях.
На рисунке 35 представлен планетарно-цевочный одноступенчатый мотор-редуктор, состоящий из электродвигателя1 и преобразователя движения, которые соединены в единый корпус винтами 3.
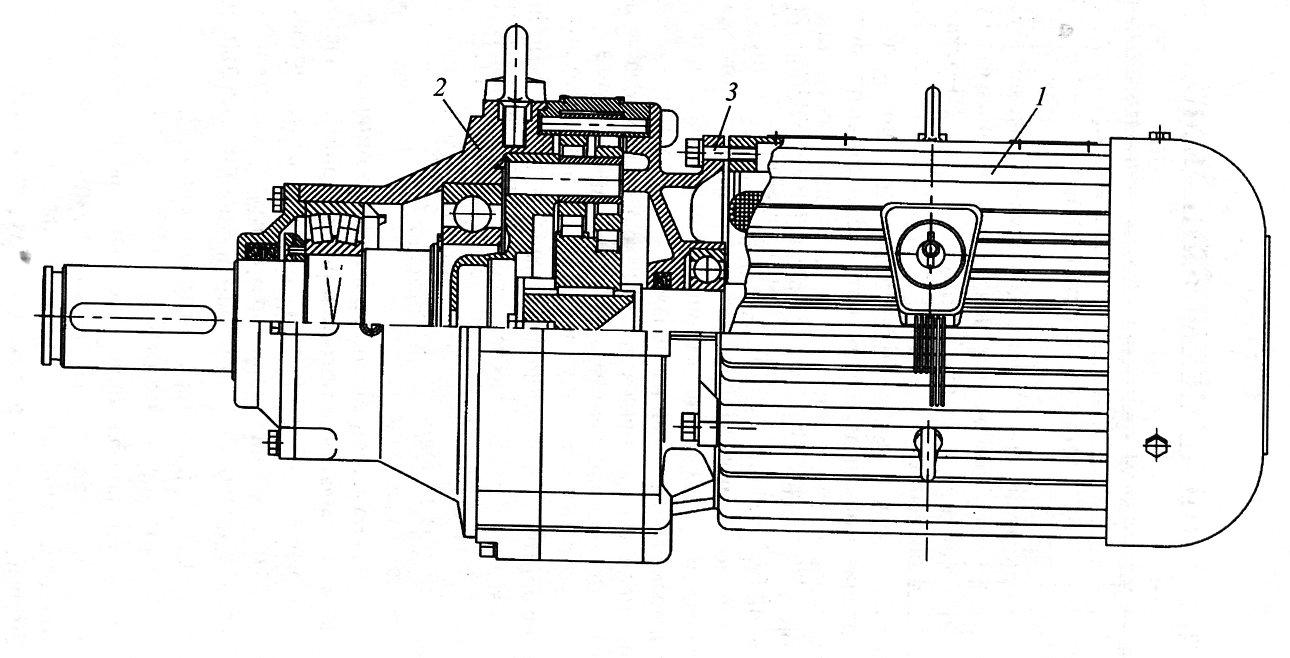
Рисунок 35 – Планетарно-цевочный одноступенчатый редуктор
Мотор-редуктор на основе волнового механизма с электромагнитным генератором волн изображен на рисунке 35. Он состоит из гибкого колеса 1, электромагнитного генератора волн 2, жесткого колеса 3, гибкого подшипника 4 кулачка 5, зубчатого колеса 6 и выходного вала 7.
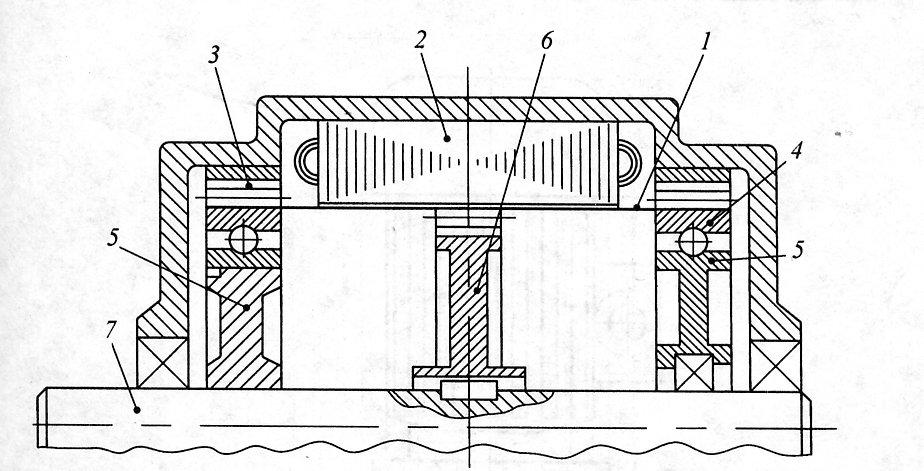
Рисунок 36- Мотор-редуктор на основе волнового механизма
В состав современных модулей движения могут входить и другие механические устройства – тормозные и люфтовыбирающие устройства, вариаторы и направляющие. На рисунке 37 показана компоновочная схема волнового мотор-вариатор-редуктора.
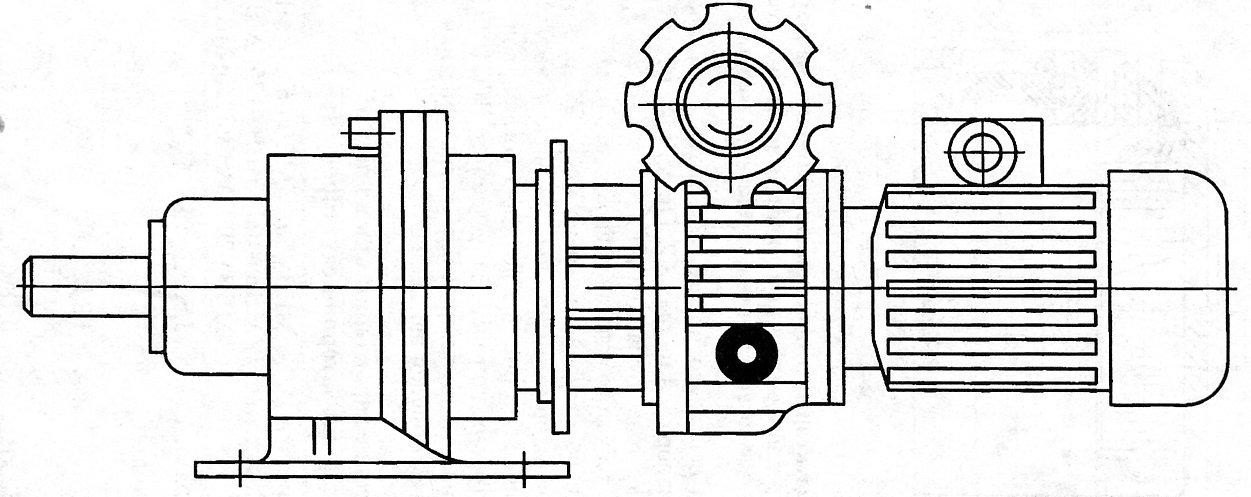
Рисунок 37 – Мотор-вариатор-редуктор
6.2 Мехатронные модули движения
Мехатронный модкль движения представляет собой конструкивно целостное изделие, объединяющее в едином корпусе двигатель, механическую ,электрическую и информационную части, которое можно использовать индивидуально и в различных комбинациях с другими модулями. В связи с развитием новых электронных технологий , которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов, в мехатронных модулях движения появились электронные и информационные устройства, что является их главным отличием от простых модулей движения.
Для создания современных движущихся систем и технологических машин необходимы разнообразные модули движения. Требования к развиваемым силам, точности и скорости движения диктуются особенностями технологической операции, а требование минимизации размеров мехатронного модуля движения – необходимостью встраивания его в технологическую машину. Попытка синтеза мехатронного модуля движения из серийно выпускаемых компонентов может привести к технически и экономически неэффективным решениям. На рисунке 38 показана блочно-модульная схема мехатронного модуля движения , позволяющая подключить к электродвигателю различные типы редукторов и фотоимпульсных датчиков обратной связи.
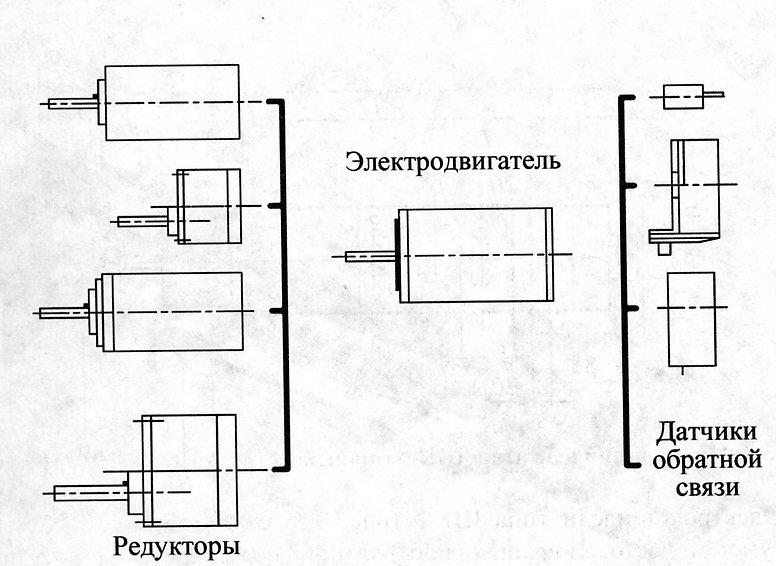
Рисунок 38 – Блочно-модульная схема построения мехатронных модулей движения
Примером мехатронных модулей вращательного движения могут служить модули фирмы Maxon. Эти модули имеют диаметр 16-40 мм, длину 24-88 мм и мощность до 120Вт. Конструктивная схема модулей представлена на рисунке 39. Модули простроены путем объединения в едином корпусе бесконтактного двигателя постоянного тока, планетарного редуктора, тормозного устройства и фотоимпульсного датчика.
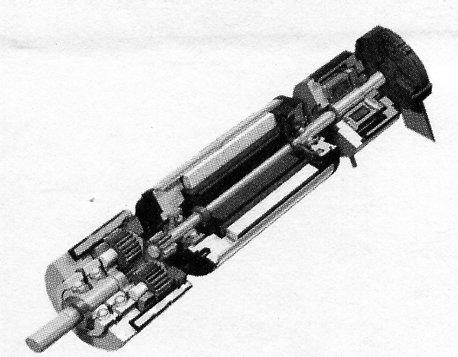
Рисунок 39- Конструкция мехатронного модуля движения фирмы Maxon
6.3 Бесконтактным (или вентильным) двигателем постоянного тока называются электрические машины, где функции коллектора и щеток выполняют полупроводниковые управляемые ключи. Они свободны от недостатков , присущих традиционным двигателям постоянного тока, которые обусловлены наличием щеточно-коллекторного узла. Вентильные двигатели по сравнению с коллекторными аналогами имеют следующие преимущества:
- высокую надежность, большой сорк службы, не требуется обслуживание при эксплуатации ( так как нет коллекторного искрения и износа щеток, уменьшено трение и нагрузка на подшипники), - улучшенные тепловые характеристики ( отсутствуют тепловыделяющие элементы в роторе, поэтому тепло рассеивается только на обмотках статора), малые сечения проводов,
-высокое быстродействие за счет малого момента инерции ротора, стабильную частоту вращения, которая не зависит от частоты напряжения питающей сети,
- большую перегрузочную способность по моменту, постоянный момент во всем диапазоне регулирования скорости,
- широкий диапазон регулирования скорости, линейные механические и регулировочные характеристики, равномерное вращение на низких скоростях.
Бесконтактные двигатели постоянного тока состоят из трех основных элементов:
1 электрической машины синхронного типа с m-фазной обмоткой на статоре и ротором в виде постоянного магнита,
2 датчика положения ротора, выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора,
3 электронного коммутатора, осуществляющего по сигналам датчика коммутацию токов в обмотках статора.
Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием датчиков Холла, фотоэффекта и т.д.
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы на рисунке 40.
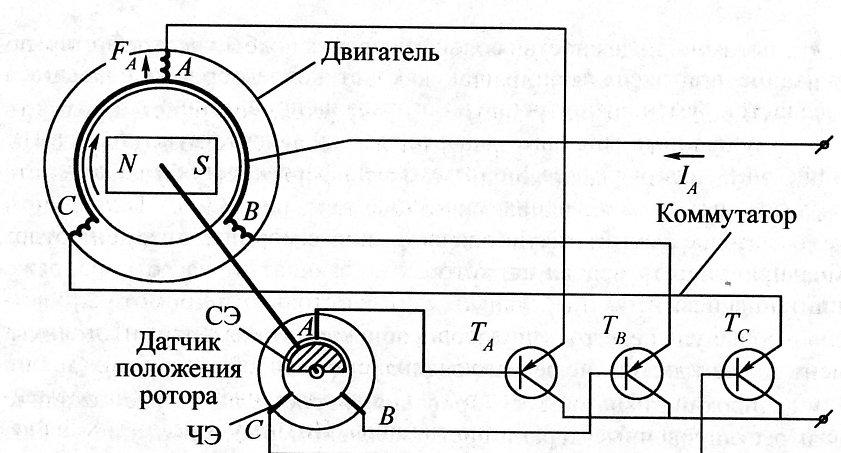
Рисунок 40- Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
Двигатель имеет три обмотки на статоре, сдвинутые в пространстве на 120 и соединенные в звезду, датчик положения с одним сигнальным элементом и тремя чувствительными элементами(их число рано числу обмоток статора), а также коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме.
В положении ротора, показанном на рисунке 40 , сигнальный элемент через чувствительный элемент А открывает транзистор ТА. Намагничивающая сила обмотки FA и взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент и двигатель приходит во вращение (1-й такт на рисунке 41,а). Вместе с ротором поворачивается сигнальный элемент датчика положения. При повороте ротора на угол , чуть больший 30сигнальный элемент воздействует сразу на два чувствительных элемента А и на В. В результате открываются два транзистора ТА и ТВ. Ток протекает по обеим обмоткам А и В и возникает результирующая сила FAB , повернутая на 60 по сравнению с первым положением ( 2-й такт, рисунок 41,б ).
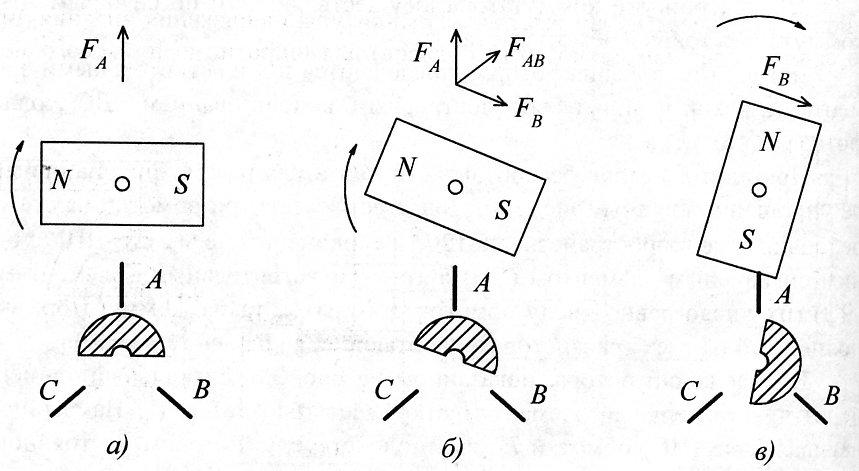
Рисунок 41- Три такта в работе бесконтактного двигателя постоянного тока
Эта сила продолжает взаимодействовать с полем постоянного магнита и двигатель развивает вращающий момент. Когда угол поворота станет чуть больше 90, транзистор ТА закроется , ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с намагничивающей силой этой обмотки, однако вращающий момент по-прежнему будет вращать ротор в том же направлении ( 3-й такт, рисунок 41, в) В конечном итоге двигатель разовьет такую скорость , при которой его момент будет уравновешиваться моментом нагрузки. Если бы бесконтактный двигатель имел столько же обмоток, чувствительных элементов и транзисторов, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно число чувствительных элементов и транзисторов не превышает 3-4. Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока, вызванных скачкообразным перемещением намагничивающей системы статора. Эта пульсация вращающего момента , пульсация токов в обмотках статора и суммарного тока двигателя , что объясняется дискретным питанием обмоток ( в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения амплитуды напряжения питания либо длительности импульсов для широтно- импульсного метода управления).
Преобразователи движения на основе планетарных зубчатых механизмов находят широкое применение в мехатронных модулях. Это объясняется их компактностью и малой массой , реализацией больших передаточных отношений, малой нагрузкой на опоры, большим коэффициентом полезного действия , высокой кинематической точностью и жесткостью.