

TEP / lekcher_1
.3.pdfКОНСПЕКТ лекций по дисциплине «Теория электропривода»
Старший преподаватель кафедры «Электропривод и автоматизация промышленных установок»
ГУВПО «Белорусско-Росийский университет» Слука М.П.
Часть 1.3 2011 г.
Глава третья
Электромеханические свойства двигателей
3.1. Общие сведения Наиболее широкое применение в электроприводе промышленных установок находят
двигатели постоянного тока с независимым, смешанным и последовательным возбуждением, а также асинхронные и синхронные двигатели переменного тока.
Двигатели постоянного тока используются в электроприводе механизмов, требующих по технологическим условиям регулирования скорости. При этом двигатели со смешанным и последовательным возбуждением, как правило, применяются в разомкнутых системах электропривода. Двигатели с независимым возбуждением в настоящее время являются основой замкнутых систем регулируемого электропривода и наиболее широко используются в массовых тиристорных электроприводах постоянного тока.
Асинхронные короткозамкнутые и синхронные двигатели имеют основное применение в массовых нерегулируемых электроприводах. Благодаря конструктивной простоте и меньшей металлоемкости подавляющее число нерегулируемых электроприводов малой и средней мощности выполняется на базе асинхронных короткозамкнутых двигателей. В нерегулируемых электроприводах средней и особенно большой мощности применяются синхронные двигатели, которые рассчитываются на работу с опережающим cos ф и могут служить источником реактивной мощности для питающихся от той же сети асинхронных двигателей и тиристорных электроприводов постоянного тока. Асинхронные двигатели с фазным ротором применяются в электроприводах механизмов, требующих регулирования скорости, либо при необходимости ограничения пусковых токов, потребляемых из сети электроприводом. Проектирование, наладка и эксплуатация электроприводов требуют глубоких знаний свойств электрических машин с позиций их использования в электроприводе. Поэтому задачей данной главы является закрепление и развитие представлений об общих физических свойствах двигателей, полученных в курсе электрических машин, и изучение их особенностей и характеристик как объектов управления в системах электропривода. В соответствии со схемой рис.В.2 здесь изучаются свойства идеализированных электромеханических преобразователей, вырабатывающих электромагнитный момент М при скорости ω, определяемой движением механической части и рассматриваемой как независимая механическая координата. Влияние момента инерции ротора двигателя Jдв и момента механических потерь на валу М, входящих в соответствии с рис.В. 2 в механическую часть электропривода, на движение электропривода уже было рассмотрено
вгл. 1.
Врезультате изучения материалов данной главы студенты должны знать и уметь использовать в практических целях математическое описание динамических процессов преобразования энергии в различных двигателях, их статические характеристики, оценки влияния различных параметров, структурные схемы и частотные характеристики электромеханических преобразователей различного типа.
Необходимо научиться правильно оценивать влияние электромагнитной инерции на процессы преобразования энергии, уметь определять границы, в которых для оценки динамических свойств двигателей можно пользоваться их статическими характеристиками. Следует обратить внимание на количественные оценки электромагнитной инерционности двигателей постоянного и переменного тока с учетом насыщения магнитной цепи машины. Сравнительные оценки быстродействия электромеханического преобразователя с независимым возбуждением по каналам управления якорной цепью и цепью возбуждения, а также асинхронного электромеханического преобразователя при питании от источников напряжения и тока имеют важное практическое значение.
Для облегчения понимания и усвоения материала перед изучением данной главы
необходимо повторить ряд основополагающих вопросов из курса электрических машин. К их числу относятся устройство машин постоянного и переменного тока и назначение их основных элементов, статические механические характеристики, понятие реакции якоря и условий коммутации токов на коллекторе машины постоянного тока, представления о магнитном поле машины при холостом ходе и под нагрузкой и об основных его характеристиках. Полезно запомнить ряд основных соотношений, таких, как выражения ЭДС вращения и электромагнитного момента машины, схемы замещения и векторные диаграммы машин переменного тока, частотные характеристики апериодического звена, изученные в курсе теории автоматического управления.
Изучение свойств электромеханических преобразователей осуществляется на основе анализа статических и динамических механических характеристик, определяющих зависимость электромагнитного момента двигателя от напряжения или частоты, скорости ротора и параметров электрических цепей. Для правильного понимания режимов преобразования энергии необходимо использовать знания, полученные в главе «Механика электропривода». В частности, в соответствии с основным уравнением движения (1.42) в статических режимах работы при Мс=const электромагнитный момент машины равен моменту нагрузки электропривода М=Мс. Следовательно, в статических режимах работы механическую характеристику двигателя можно рассматривать как зависимость скорости электропривода от момента статической нагрузки его механической части. В динамических режимах М≠Мс, поэтому подобная интерпретация смысла механической характеристики недопустима.
В процессе изучения материалов данной главы необходимо научиться рассчитывать параметры двигателей и их статические характеристики, а также составлять структурные схемы электромеханических преобразователей. Эти навыки должны быть получены на практических занятиях и при выполнении курсовой работы. Необходимые рекомендации, расчетные соотношения и методы изложены в примерах.
3.2. Математическое описание процессов преобразования энергии в двигателе постоянного тока с независимым возбуждением
Двигатель постоянного тока с независимым возбуждением имеет обмотку якоря и обмотку возбуждения, которые в общем случае получают питание от независимых источников постоянного тока. Необходимым условием непрерывного процесса электромеханического преобразования энергии является протекание переменных токов хотя бы по части обмоток машины. Выполнение этого условия в машине постоянного тока обеспечивается работой коллектора, коммутирующего постоянный ток, поступающий в якорную обмотку со стороны источника питания, с частотой ωэл, равной электрической скорости ротора. Таким образом, с точки зрения внутренних процессов двигатель постоянного тока является машиной переменного тока и уравнения, описывающие его механическую характеристику, являются частным случаем обобщенного математического описания процессов электромеханического преобразования энергии, полученного в гл. 2.
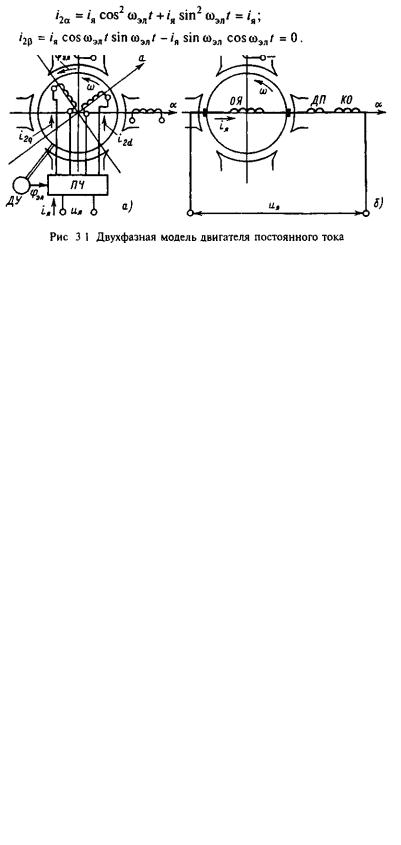
Модели двигателя постоянного тока соответствует включение обмоток двухфазной обобщенной машины по схеме, показанной на рис.3.1,а. Здесь обмотка статора по оси β включена на постоянное напряжение uв, а обмотка по оси α пока не используется. Обмотки фаз 2d и 2q ротора питаются переменными токами i2d и i2q от преобразователя частоты ПЧ, осуществляющего коммутацию токов i2d и i2q в функции угла поворота ротора фэл с частотой ωэл. Если в качестве ПЧ используется механический коммутатор - коллектор машины, то схема на рис.3.1,а представляет собой модель двигателя постоянного тока. В случае когда в качестве ПЧ используется вентильный преобразователь частоты, коммутируемый датчиком углового положения ротора ДУ, эта же схема является схемой модели вентильного двигателя. Поэтому анализ электромеханических свойств двигателей постояннного тока в пределах допущений, лежащих в основе общей модели, справедлив и для вентильного двигателя на базе синхронной машины, получающего питание от мощной сети постоянного тока. В рассматриваемой модели МДС статора создается постоянным током возбуждения iв=i1β поэтому она ориентирована по оси β и неподвижна в пространстве. Соответственно и МДС ротора при вращении ротора со скоростью ω должна быть неподвижна относительно статора, а это возможно при условии, что МДС ротора вращается относительно ротора против его вращения со скоростью - ω. Для выполнения данного условия необходимо, чтобы обмотки фаз ротора обтекались переменными токами i2d и i2q , изменяющимися с частотой ωэл по закону
Магнитодвижущая сила ротора в этом случае будет вращаться относительно ротора со скоростью - ω в соответствии с выбранным чередованием фаз, оставаясь неподвижной относительно статора.
Так как поле неподвижно относительно статора, для получения математического описания динамических процессов преобразования энергии в двигателе постоянного тока целесообразно использовать преобразование α, β, d, q → α, β (ωк=0). Осуществим с помощью формул (2.16) преобразование токов i2d и i2q к осям α, β:
Следовательно, в осях а, 3 действительным переменным токам обмотки ротора эквивалентна одна якорная обмотка, обтекаемая постоянным током iя и создающая поле, неподвижное в пространстве и направленное по оси а, совпадающей с осью щеток двигателя. В реальной машине по оси щеток направлены также МДС обмоток дополнительных полюсов ДП и компенсационной обмотки КО, с учетом которых схема модели двигателя постоянного тока с независимым возбуждением в осях α, β

представлена на рис.3.1,б.
Для получения уравнений динамической механической характеристики двигателя постоянного тока можно непосредственно воспользоваться преобразованными уравнениями обобщенной машины в осях α, β:
В соответствии с рис.3.1,б в (3.1) можно принять
Показанные на рис.3.1,б обмотки машины, расположенные на статоре по оси а, непосредственно в процессе электромеханического преобразования энергии не участвуют. Обмотка ДП обтекается током якоря и обеспечивает вблизи оси щеток α, т. е. в зоне, где осуществляется коммутация тока в проводниках обмотки якоря, магнитное поле такого направления и значения, при котором процессы коммутации протекают наиболее благоприятно. Компенсационная обмотка КО является распределенной обмоткой, закладываемой в пазы на главных полюсах аналогично якорной обмотке. Вследствие протекания по ней тока якорной цепи она создает МДС, компенсирующую МДС реакции якоря по поперечной оси α. В машинах без компенсационной обмотки эта реакция якоря искажает форму поля под главными полюсами и в связи с насыщением магнитопровода создает размагничивающую продольную составляющую. Благодаря действию КО влияние поперечной реакции якоря на поле главных полюсов существенно уменьшается. С учетом сказанного можно выразить потокосцепление обмоток через токи:
Здесь L - полная индуктивность обмотки возбуждения, а LяΣ - суммарная индуктивность рассеяния обмоток ЯО, ДП и КО, так как основная МДС обмотки ЯО по оси а компенсируется МДС компенсационной обмотки. Соответственно сопротивление RяΣ включает в себя все сопротивления обмоток якорной цепи двигателя. С учетом введенных обозначений и (3.2) система уравнений (3.1) запишется в виде
Нетрудно видеть, что первые два уравнения полученной системы представляют собой уравнения Кирхгофа для цепей возбуждения и якоря машины, причем последний член уравнения для цепи якоря есть ЭДС двигателя:
где k=pп·N/2·π·a - конструктивный коэффициент; N - число активных проводников; а - число параллельных ветвей якорной обмотки.
Момент в (3.3) с учетом (3.4) определяется соотношением
Следовательно, для записи уравнений механической характеристики двигателя постоянного тока можно, как это принято, непосредственно использовать схему его цепей на постоянном токе, приведенную на рис.3.2. На этой схеме и в дальнейшем изложении вспомогательные обмотки ДП и КО не показываются, а их сопротивления и

индуктивности рассеяния учитываются в RяΣ и LяΣ Получение уравнений (3.3) из уравнений обобщенной машины, выполненное здесь, имеет целью показать универсальные возможности методики описания динамических процессов преобразования энергии, изложенной в гл. 2.
С учетом (3.4) и (3.5) систему (3.3) можно представить в виде
Математическое описание механической характеристики двигателя постоянного тока (3.6) при переменном потоке нелинейно в связи с тем, что ЭДС двигателя е и электромагнитный момент М пропорциональны произведениям потока соответственно на скорость и ток якоря. Во многих случаях двигатель с независимым возбуждением работает при постоянном потоке Ф=const, при этом уравнения механической характеристики линеаризуются и после преобразований математическое описание динамических процессов преобразования энергии в двигателе с независимым возбуждением представляется в виде следующего уравнения механической
характеристики:
Подстановка М=kФIЯ в (3.7) дает уравнение электромеханической характеристики:
Как частный результат полученного математического описания могут быть определены уравнения статических электромеханической и механической характеристик двигателя. При постоянном потоке уравнения этих характеристик с помощью (3.7) и (3.8) при dM/dt=di/dt=0 записываются в виде
Рассматривая полученные уравнения, можно заключить, что при Ф=const электромеханическая и механическая характеристики двигателя с независимым возбуждением линейны. Поэтому положение каждой характеристики может быть охарактеризовано двумя точками: точкой идеального холостого хода, в которой I=0; М=0, и точкой короткого замыкания, в которой ω=0. В соответствии с (3.9) и (3.10) первой из них соответствует скорость идеального холостого хода:
Второй соответствуют момент Мкз и ток Iкз короткого замыкания. Их можно определить, решив (3.9) и (3.10) относительно тока и момента:
Положим в этих уравнениях ω=0, получим
Важным показателем электромеханических свойств двигателя является модуль статической жесткости механической характеристики βст. Зависимость βст от параметров двигателя получим, продифференцировав в соответствии с (2.48) уравнение (3.13) по скорости:
Следовательно, модуль статической жесткости определяется соотношением
С помощью (3.11) и (3.16) уравнение статической механической характеристики двигателя с независимым возбуждением может быть записано в следующих
формах:
где Мкз=β·ω0.
Уравнение электромеханической характеристики с учетом (3.11) и (3.14) может иметь следующие формы записи:
3.3. Естественные характеристики двигателя с независимым возбуждением
Электрический двигатель проектируется и изготавливается для определенного расчетного режима, называемого номинальным режимом работы (см. гл. 5). Этот режим реализуется в естественной схеме включения, которая для двигателя с независимым возбуждением приведена на рис.3.2. Она соответствует отсутствию добавочных сопротивлений в якорной цепи и номинальным значениям напряжения Uя=UHOM и потока Ф=Фном. Электромеханическая и механическая статические характеристики двигателя, соответствующие этим условиям работы, называются естественными характеристиками:
где ω0ном- скорость идеального холостого хода при работе на естественной характеристике; βе- модуль статической жесткости естественной механической характеристики; с - коэффициент ЭДС и момента при номинальном потоке.
Естественная механическая характеристика двигателя дает основные представления об электромеханических свойствах двигателя. Она определяет его рабочую - номинальную - скорость и показывает, как изменяется скорость электропривода при изменениях нагрузки в статических режимах работы. Чем выше модуль жесткости естественной характеристики βе, тем более стабильна скорость электропривода при широких пределах изменения его нагрузки, и напротив, при малой жесткости механической характеристики изменения рабочей скорости механизма при изменениях нагрузки могут быть значительными.
Другой оценкой стабильности рабочей скорости электропривода при различных

нагрузках является статизм механической характеристики двигателя. Количественной оценкой статизма может служить номинальный перепад скорости Δωном=ω0ном-ωном, соответствующий изменению момента двигателя от М=0 до М=Мном. Его значения связаны с модулем жесткости механической характеристики соотношением, определяемым из (3.18):
Таким образом, статизм механической характеристики обратно пропорционален модулю ее жесткости. Для получения необходимых представлений о реальных жесткостях естественных механических характеристик различных двигателей с независимым возбуждением необходимо записать уравнение механической характеристики в относительных единицах.
В качестве базисных величин обычно принимаются Uном, Iном, Фном, Rя.ном=Uном/Iном; ω0ном; Mном при этом уравнения (3.9) и (3.10) в относительных единицах имеют следующий вид:
здесь
Уравнения естественных электромеханической и механической характеристик в относительных единицах могут быть получены с помощью (3.25) и (3.26) при Ф*=1 и
ω0*=1:
Так как при Ф=Фном М*=Iя*, уравнения (3.27) и (3.28) идентичны и естественные электромеханическая и механическая характеристики в относительных единицах совпадают (рис.3.3,a). Номинальный перепад скорости на естественной характеристике Δωном* в относительных единицах, как это следует из (3.27), равен относительному сопротивлению якоря RЯ*. Относительный ток короткого замыкания обратно пропорционален Rя*:
Собственное сопротивление якорной цепи Rя<<Rном, поэтому ток короткого замыкания на естественной характеристике у двигателей средней и большой мощности превышает номинальный в 10-20 раз. Он значительно превосходит ток Iя.доп, допустимый

по условиям коммутации, и лежит далеко за пределами показанного на рис.3.3,а рабочего участка естественной механической характеристики. Перегрузочная способность двигателей с независимым возбуждением нормального исполнения обычно лежит в пределах λ=Мдоп/Мном=2÷2,5 и для компенсированных двигателей совпадает с кратностью допустимой по условиям коммутации перегрузки по току.
Благодаря малости относительного сопротивления якорной цепи номинальный перепад скорости на естественной характеристике для двигателей средней и большой мощности составляет несколько процентов скорости идеального холостого хода и уменьшается с возрастанием мощности двигателя. Соответствен но жесткость механической характеристики при этом возрастает обратно пропорционально сопротивлению:
Относительный перепад скорости Δωном, для двигателей большой мощности весьма мал и лежит в пределах Δωном=0,015÷0,03. Двигатели небольшой мощности имеют на порядок больший статизм естественной механической характеристики, причем форма их характеристик отличается от показанной на рис.3.3,а.
Уравнение (3.22) с достаточной точностью описывает механические характеристики двигателей с независимым возбуждением, имеющих компенсационную обмотку. Все двигатели малой мощности и значительная часть двигателей средней мощности не имеют компенсационной обмотки, поэтому для них уравнение (3.22) описывает механические характеристики приближенно.
Для некомпенсированных двигателей форма механической характеристики отклоняется от показанной на рис.3.3,а в связи с действием продольной составляющей поперечной реакции якоря. Эта составляющая при UB=const вызывает уменьшение потока двигателя Ф по мере роста тока якоря в нелинейной зависимости. Рассматривая уравнение механической характеристики (3.10), можно установить, что такое влияние реакции якоря подобно нелинейной положительной обратной связи по току, так как при увеличении тока якоря увеличивается расчетное значение .скорости идеального холостого хода. При малых токах якоря действие реакции якоря проявляется слабо и kФ=const. В этой зоне, соответствующей Iя<Iном, реальная естественная характеристика двигателя имеет примерно постоянную жесткость:
где Ф0 - поток двигателя в режиме идеального холостого хода.
В номинальном режиме работы (IЯ=Iном) реакция якоря может заметно снижать поток двигателя, поэтому обычно Фном<Ф0, а жесткость механической характеристики не определяется (3.16), так как существенное влияние на изменения скорости при изменениях тока и момента двигателя оказывают изменения ω0. Номинальный перепад скорости при этом меньше, чем у компенсированной машины того же типа, в связи с тем, что Фном<Ф0:
Соотношение (3.31) можно преобразовать к виду
где Δω'ном=IНОМ·Rя/k·Ф0 - номинальный перепад скорости компенсированной машины.

Если в (3.32) ввести номинальный перепад потока Ф'ном, то она примет вид
Формула (3.33) показывает, что реакция якоря уменьшает номинальный перепад скорости в тем большей степени, чем относительно меньше сопротивление якорной цепи.
В области перегрузок (IЯ>Iном) размагничивающее действие реакции якоря возрастает и увеличение первого члена в уравнении (3.9) может превышать возрастание его второго члена, обусловленного падением напряжения на Rя.Следовательно, в механической характеристике некомпенсированных двигателей могут быть участки, где βст=dM/dω>0. При дальнейшем увеличении тока якоря и момента двигателя определяющим вновь становится возрастание падения напряжения в цепи якоря и жесткость механической характеристики становится отрицательной.
Проведенный анализ позволяет представить форму реальной механической естественной характеристики некомпенсированных двигателей с независимым возбуждением, как показано на рис.3 3,б (кривая 7). Здесь же показана характеристика 2 компенсированной машины, у которой Фном=Ф0. Кроме того, характеристика 3 показывает, как располагается относительно реальной естественной характеристики характеристика, рассчитанная по (3.23) при реальном потоке Фном<Ф0, вычисленном по паспортным данным двигателя (см. пример 3.1).
Рассматривая рис.3.3,б, можно установить, что продольная составляющая поперечной реакции якоря неблагоприятно сказывается на форме естественной механической характеристики двигателя, искажая ее форму. Кроме того, реакция якоря неблагоприятно сказывается на перегрузочной способности двигателя. При токе, соответствующем допустимой по условиям коммутации перегрузке, поток двигателя вследствие наличия реакции якоря снижается на 10-20 %. Соответственно пропорциональность между током и моментом нарушается и перегрузочная способность некомпенсированных двигателей при прочих равных условиях ниже, чем у компенсированных.
Изменение потока главных полюсов машины из-за реакции якоря неблагоприятно сказывается и на динамических свойствах электропривода, поэтому в некомпенсированных двигателях мощностью до 100 кВт применяют так называемые стабилизирующие обмотки, размещаемые на главных полюсах машин. Эти обмотки включаются в цепь якоря последовательно и создают небольшую положительную МДС, компенсирующую действие реакции якоря. Такие двигатели предназначаются для нереверсивного режима работы, так как при изменении направления вращения ток якоря в двигательном режиме имеет противоположное направление и стабилизирующая обмотка действует против МДС обмотки главных полюсов, усугубляя влияние реакции якоря.
Проведенный анализ естественных характеристик двигателя с независимым возбуждением свидетельствует о том, что его использование в разомкнутых системах электропривода, т. е. при питании от сети постоянного тока, целесообразно в тех случаях, когда для приводимого в движение механизма требуется работа при стабильной скорости, мало меняющейся при изменениях нагрузки. В замкнутых системах регулирования координат электропривода имеется возможность формировать требуемые для механизма механические характеристики, при этом естественные характеристики двигателя определяют исходные свойства электропривода, которые системой управления корректируются в требуемом направлении.
3.4. Искусственные статические характеристики и режимы работы двигателя с независимым возбуждением
Для управления работой двигателя производятся необходимые изменения параметров и воздействий, определяющих его механические и электромеханические характеристики. В соответствии с (3.9) и (3.10) такими параметрами и воздействиями