

лаба6 / Лаба 6_our
.docМинистерство образования Республики Беларусь
Государственное учреждение высшего профессионального образования
Белорусско – Российский университет
Кафедра «Электропривод и автоматизация промышленных установок»
Курс «Системы управления электроприводами»
Отчет
по лабораторной работе № 6
«Исследование электропривода, построенного по системе широтно-импульсный преобразователь – двигатель постоянного тока»
Выполнили: ст. гр. ЭПР-01
Шанталосов М.И.
Чедия Д.В.
Киреев Н.Н.
Проверил ст. преподаватель:
Голушко А.В.
Могилев 2004г.
Цель работы: изучение принципов построения широтно-импульсных преобразователей. Исследование статических и динамических характеристик системы ШИП-ДПТ.
Оборудование: лабораторный стенд, преобразователь, осциллограф, исследуемый двигатель, генератор постоянного тока (нагрузочная машина).
Сведения о лабораторной установке:
Лабораторная установка позволяет исследовать работу разомкнутой и замкнутой систем ШИП-ДПТ. Нагрузка на валу исследуемого двигателя Ml создается при помощи генератора G1 , якорь которого через выключатель SA2 соединяется с нагрузочным реостатом RP2 .Частота вращения машины Ml измеряется с помощью тахогенератора BR1 по прибору PV2. Ток в якоре машины Ml измеряется прибором РА1, а напряжение на якоре прибором PV3 , напряжение задания прибором PV1.
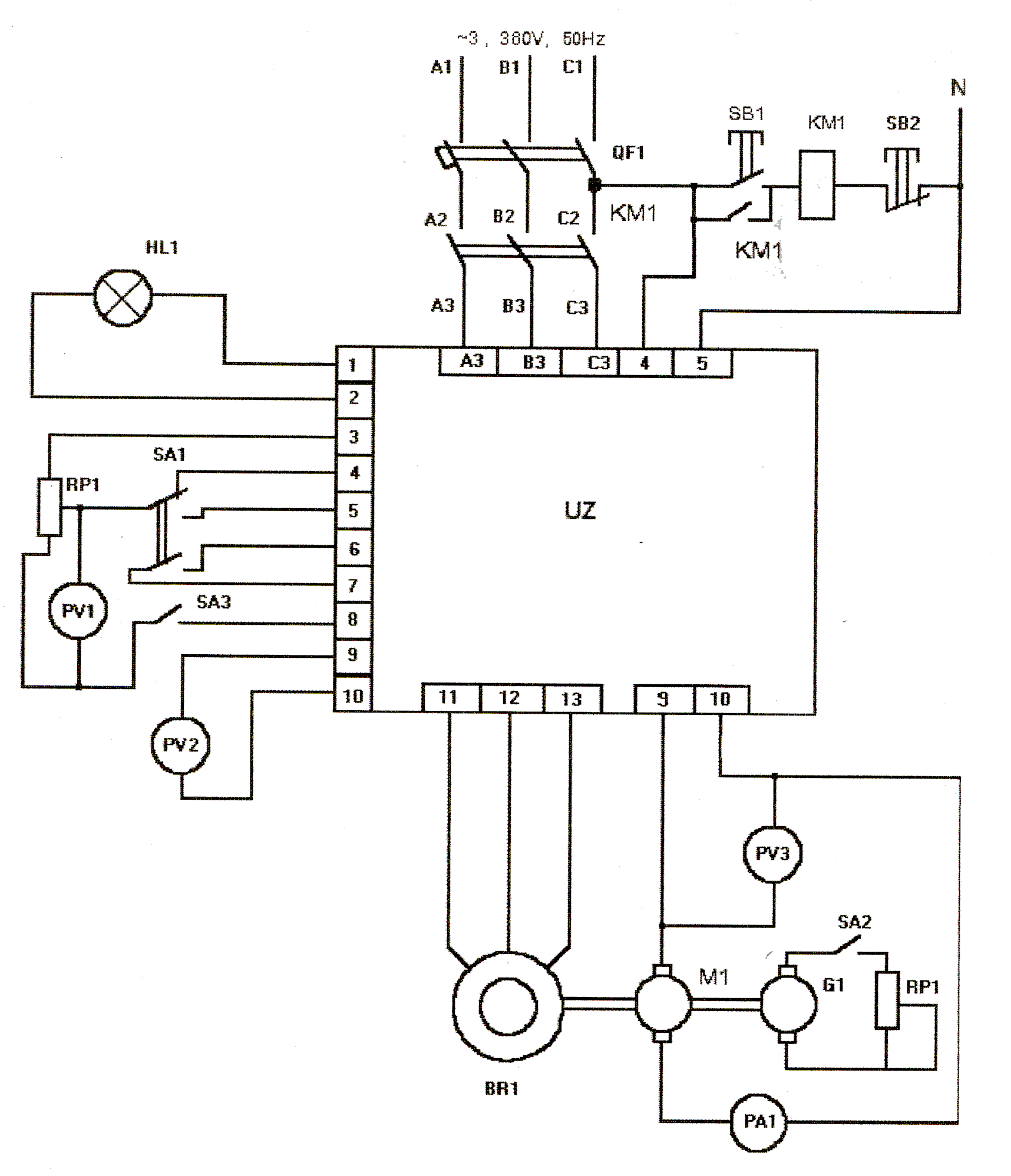
Рис.1 – Схема электрическая принципиальная лабораторного стенда.
Функциональная схема исследуемой статической системы стабилизации скорости вращения электромеханической системы "реверсивный широтно-импульсный преобразователь - двигатель постоянного тока независимого возбуждения" показана на рисунке:
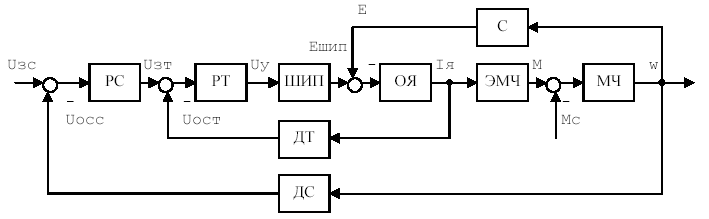
Рисунок 2 - Функциональная схема системы "ШИП-ДПТ с НВ"
На рисунке 2 введены следующие обозначения:
РС - П-регулятор скорости;
РТ - ПИ-регулятор тока;
ШИП - реверсивный широтно-импульсный преобразователь;
ОЯ - обмотка эквивалентной якорной цепи ЭП;
ЭМЧ - электромагнитная часть ДПТ с НВ;
МЧ - механическая часть ЭП;
ДТ - датчик тока;
ДС - датчик скорости.
Сигналы в функциональной схеме соответствуют:
Uзс - напряжение задания скорости;
Uзт - напряжение задания тока;
Uу - напряжение управления на входе блока коммутации ШИП;
Uocc - напряжение отрицательной обратной связи по скорости;
Uocт - напряжение отрицательной обратной связи по току;
Eшип - ЭДС на выходе преобразователя;
Iя - ток якорной цепи;
М - момент двигателя;
w - угловая скорость вращения двигателя;
Е - противо-ЭДС двигателя;
Мс - момент сил статических сопротивлений.
Моделирование системы ШИП-ДПТ может производится с целью анализа энергетических, электрических и механических характеристик системы.
Математическое описание элементов системы ЭП.
1 Математическое описание двигателя постоянного тока независимого возбуждения.
При математическом описании двигателя постоянного тока с независимым возбуждением принимаются следующие допущения:
а) считается скомпенсированным размагничивающее действие реакции якоря;
б) параметры двигателя считаются неизменными за цикл работы;
в) пренебрегается влиянием вихревых токов в массивных частях магнитной системы двигателя;
г) магнитный поток считается постоянным.
Линеаризованная математическая модель двигателя постоянного тока с независимым возбуждением описывается системой дифференциальных уравнений в операторной форме:
Eтп(p) - E(p) = Iя(p) · Rяц · (Tяц · p + 1 ) ,
E(p) = C · w(p) ;
M(p) = C · Iя(p) ;
M(р) - Мс(р) = Jпр · р · w(р) ;
где Eтп(p) - изображение ЭДС тиристорного преобразователя;
E(p) - изображение противо ЭДС двигателя;
Iя(p) - изображение тока якоря;
Rяц - суммарное сопротивление якорной цепи;
Tяц - суммарная постоянная времени якорной цепи;
w(p) - изображение скорости электропривода;
M(p) - изображение момента двигателя,
Jпр - суммарный момент инерции привода, приведенный к валу двигателя;
С - конструктивный коэффициент ДПТ;
Мс(р) - изображение момента статических сопротивлений.
На основе полученной системы уравнений ДПТ с НВ можно представить следующей структурной схемой:

Рисунок 3 - Структурная схема ДПТ с НВ.
На рисунке 3 обозначены динамические звенья, описываемые передаточными функциями:
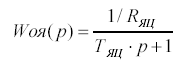
а) обмотка якорной цепи двигателя
Wоя(р) = Iя(p)/(Eтп(p) - E(p));
б) электромагнитная часть двигателя
Wэмч(р) = M(p) / Iя(p);
Wэмч(р) = С;
в) механическая часть двигателя
Wмч(р) = w(p) / (M(p)-Mc(p));
г) внутренняя обратная связь по ЭДС двигателя
Wвос(р) = E(p) / w(p) ;
Wвос(р) = C.
2 Математическое описание широтно-импульсного преобразователя
При составлении математической модели широтно-импульсного преобразователя (ШИП) вводятся следующие допущения:
а) считается, что ШИП работает только в режиме непрерывного тока;
б) время переходного процесса внутри вентилей пренебрежимо мало по сравнению с периодом коммутации.
Свойства ШИП определяются частотой коммутации ключей fк. При этом передаточная функция ШИП имеет вид звена чистого запаздывания
Wшип(p) = Кшип · exp(-Т·р),
где Т - постоянная времени чистого запаздывания, с
Т = 1 / fк.
Так как частота коммутации fk может достигать значения 3 кГц для уменьшения потерь, то ШИП с достаточной для инженерных расчетов точностью может рассматриваться как метамодель, выполняемая как пропорциональное динамическое звено с передаточной функцией
Wшип(p) = Кшип ,
где Кшип - коэффициент передачи широтно-импульсного преобразователя.
3 Математическое описание регуляторов.
Передаточная функция пропорционально-интегрирующего (ПИ) регулятора имеет вид:

где Kп - коэффициент передачи пропорциональной части,
Ти - постоянная времени интегрирующей части регулятора, с.
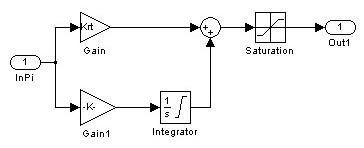
Так как в схеме управления ЭП регуляторы реализуются на типовых схемах подключения операционных усилителей, то напряжение на выходе регулятора изменяется в диапазоне от плюс 10 В до минус 10 В. Кроме этого в схеме регулятора возможно использование блока отсечки, который дополнительно ограничивает напряжение на выходе регулятора. Поэтому при моделировании регулятора следует на выходе ставить нелинейность типа ограничения, описывающую насыщение операционного усилителя или срабатывание отсечки.
Схема программной модели ПИ-регулятора с учетом насыщения выходных напряжений интегрирующей и пропорциональной частей на уровне выше +10 В и ниже –10В, выполненная в виде подсистемы SIMULINK и имеет вид:
Передаточная функция пропорционального П- регулятора:
Wp(p) = Kп,
где Kп - коэффициент передачи регулятора.
Схема программной модели П-регулятора с учетом насыщения выходных напряжений интегрирующей и пропорциональной частей на уровне выше +10 В и ниже –10В, выполненная в виде подсистемы SIMULINK и имеет вид:

4 Математическое описание датчиков обратных связей
Датчики обратных связей по току и скорости с приемлемой точностью при моделировании ЭП могут рассматриваться как безинерционные динамические звенья.
В качестве датчика тока могут использоваться шунт, магнитодиоды, трансформаторы тока в силовой цепи переменного тока преобразователя. При составлении их математического описания вводится допущение, что сигнал напряжения на выходе датчика тока пропорционален величине тока во всем диапазоне измерения.
Передаточная функция датчика тока тогда имеет вид
Wдт(р) = Кдт = Uвых,m / Iяm,
где Uвых,m - максимальное напряжение на выходе ДТ,
Iяm - максимальное значение якорного тока.
В качестве датчика скорости используется тахогенератор постоянного тока с возбуждением от магнитов. При его рассмотрении вводятся допущения:
- сигнал напряжения на выходе ДС пропорционален величине скорости вращения во всем диапазоне измерения (не учитывается влияние пульсации выходного напряжения);
- постоянная времени фильтра на выходе тахогенератора учитывается в постоянной времени ТП.
Передаточная функция датчика скорости тогда имеет вид
Wдс(р) = Кдс = Uвых,m / w m,
где Uвых,m - максимальное напряжение на выходе ДС,
wm - максимальное значение скорости вращения ЭП.
Программная модель системы ШМП-ДПТ:
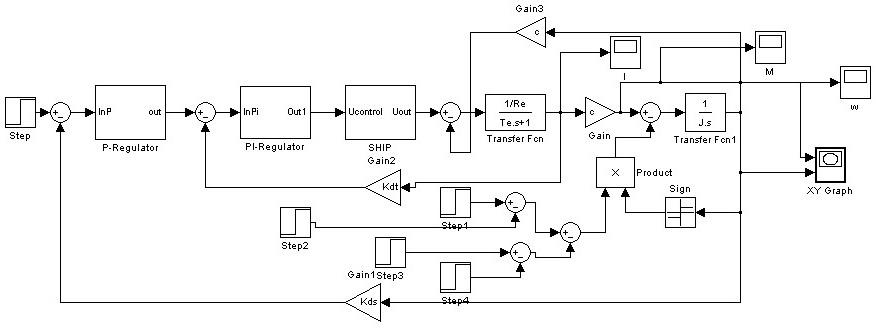
Рисунок 4 – Программная модель системы ШИП-ДПТ
Параметры двигателя:
P2ном,кВт 1.6
Rяэ, Ом 1.95
Тяэ, с 0.018
Iяном, А 8.5
Uяном, В 220
щном, с-1 157.1
С, В·с 1.334
Jпр,кг·м2 0.066
Параметры широтно-импульсного преобразователя:
Кшип 34.25
fшип, Гц 800
Параметры датчиков обратных связей:
Кдт, В/А 0.588
Кдс, В·с 0.064
Параметры системы управления:
Крт 0.086
Тирт, с 0.207
Крс 11.43
Назгрузочная диаграмма и режим работы:
Мс1, Н·м 5.0
Мс2, Н·м 10
t2, с 1.5
t2, с 2.0
Статические и динамические характеристики системы ШИП-ДПТ в замкнутом состоянии.
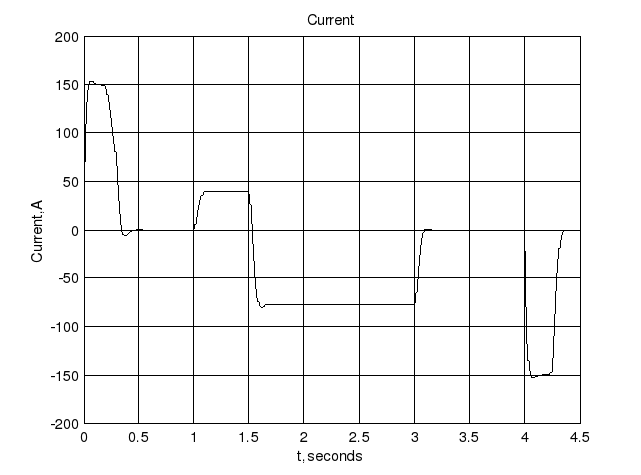
Рисунок 5 – График изменения тока двигателя.
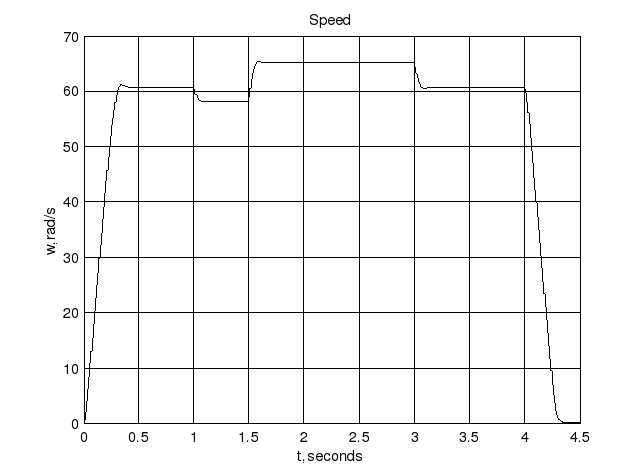
Рисунок 6 – График изменения скорости двигателя
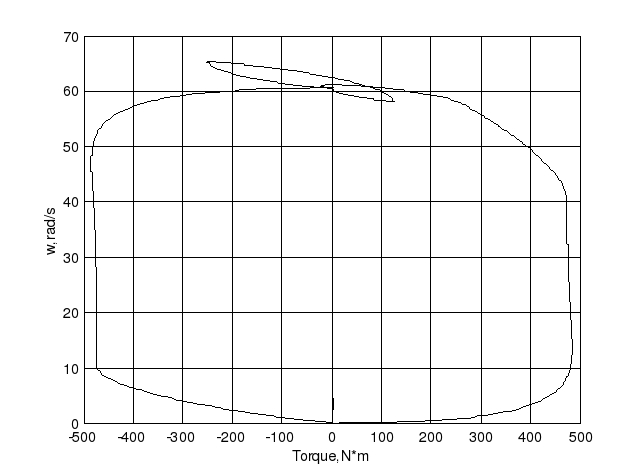
Рисунок 8 – Динамическая механическая характеристика.