

Министерство образования Республики Беларусь
Министерство образования и науки Российской Федерации
Государственное учреждение высшего профессионального образования
“Белорусско-Российский Университет”
Кафедра “Электропривод и АПУ”
Отчет по лабораторной работе №6
“Исследование электропривода, построенного по системе широтно-импульсный преобразователь-двигатель постоянного тока (ШИП-ДПТ)”.
Выполнил: ст. группы ЭП-021
Богдашова О.А.
Застрелов А.А.
Костецкая О.В.
Преподаватель:
Максимович М.С.
Могилев, 2006
Цель работы:
1) изучение принципов построения широтно-импульсных преобразователей;
-
исследование статических и динамических характеристик системы ШИП-ДПТ.
Ход работы:
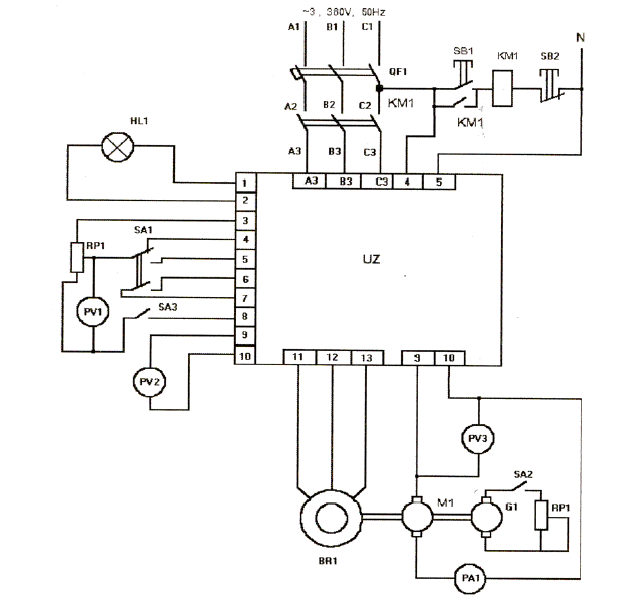
Рисунок 1 – Схема лабораторной установки.
-
Расчет регуляторов тока и скорости.
а) расчет регулятора тока.
Настроим его на модульный оптимум:

Рисунок 4 – Структурная схема системы.
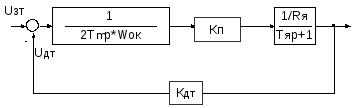
Рисунок 5 –Контура тока системы.
Рассчитаем коэффициент датчика тока:
![]() ,
,
где:
Uзад – напряжение задания тока.
![]() -
коэффициент тока. Принимается равным
1,5÷2. Примем данный коэффициент равным
1,7.
-
коэффициент тока. Принимается равным
1,5÷2. Примем данный коэффициент равным
1,7.
Т.о. КДТ=10/(1,7*3,1)=1,89.
Рассчитаем постоянную времени двигателя:
![]() ,
,
где:
Lя – индуктивность двигателя.
Rя- сопротивление двигателя.
Т.о. Tя=0,031/5,677=0,0055 с.
Рассчитаем коэффициент передачи ШИП
КП=![]() ,
,
где Uяном – напряжение на двигателе; Uяном=110 В.
Uзт=10 В.
Т.о. КП=110/10=11.
Данные m-файла для контура тока:
Uzt=10
Ra=5.677
Ta=0.0055
Kp=11
Kdt=1.89
Tmu=0.0055

Рисунок 6 –Математическая модель контура тока.
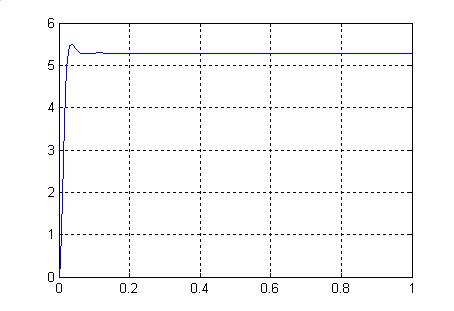
Рисунок 7 –График переходного процесса контура тока.
б) расчет регулятора скорости.
Настроим его на симметричный оптимум.
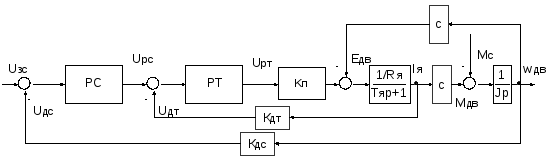
Рисунок 8 – Структурная схема системы.
Рассчитаем коэффициент датчика скорости:
![]() ,
,
где:
Uзад – напряжение задания скорости.
Т.о. КДС=10/230=0,043.
Данные m-файла для контура скорости:
Uzs=10
J=0.0614
c=0.401
Kdt=1.89
Tmu=0.0055
Kds=0.043
Ra=5.7
Kp=11
Ta=0.0055

Рисунок 9 –Математическая модель контура скорости.

Рисунок 10 –График переходного процесса скорости.
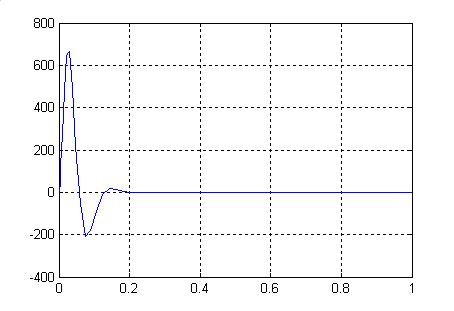
Рисунок 11 –График переходного процесса момента.
2. Рассмотрим систему с нелинейностями:
Данные m-файла:
Uzs=10
J=0.0614
Kdt=1.89
c=0.401
Kds=0.043
Tmu=0.0055
Ra=5.7
Ta=0.0055
Ktp=11
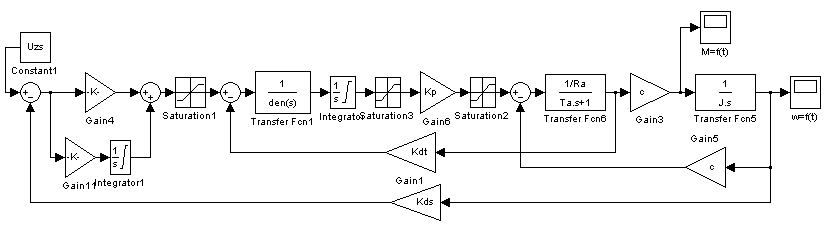
Рисунок 12– Математическая модель всей системы с нелинейностями.
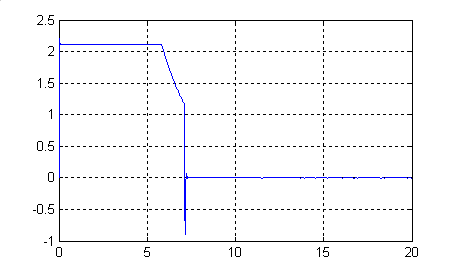
Рисунок 13 –График переходного процесса момента.
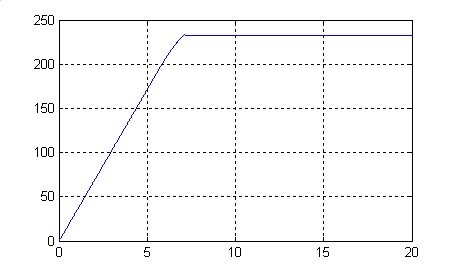
Рисунок 14 –График переходного процесса скорости.