Министерство образования Республики Беларусь
Министерство образования Российской Федерации
БЕЛОРУСCКО-РОССИЙСКИЙ УНИВЕРСИТЕТ
Кафедра “ЭП и АПУ”
Отчёт по лабораторной работе №5
“Исследование системы ТП-Д, выполненной на базе
преобразователя ЭТ-6”
Выполнил ст.гр. АЭП-063
Кучерявый А.В.
Белошейкин М.А.
Николаев А.А.
Проверил:
Селиванов В.А.
Могилёв, 2010
Цель работы: изучение статических и динамических характеристик системы
ТП-Д с совместным управлением групп вентилей.
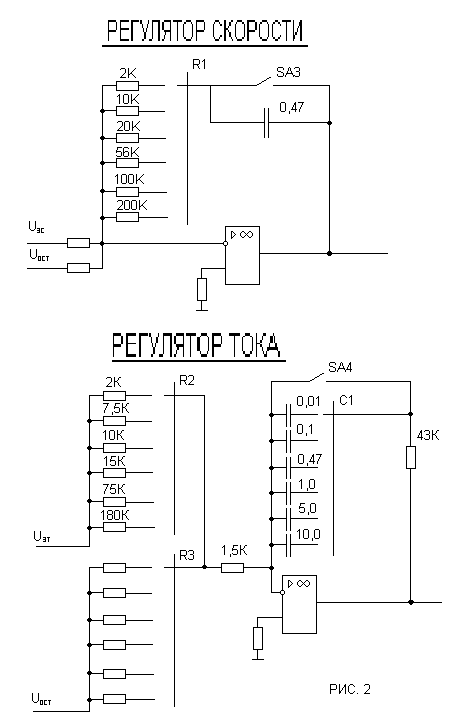
Краткие сведения о лабораторной установке.
Лабораторный стенд, схема электрическая принципиальная которого приведена на рис. 1, когда-то был пригоден для исследования статических и динамических характеристик системы ТП-Д при различных настройках регулятора скорости и тока. Функциональная схема регуляторов приведена на рис.2. Скорость исследуемого двигателя М1 регулируется тиристорным преобразователем ЭТ-6 с совместным управлением. Дроссели L1 и L2 служат для ограничения уравнительного тока. Нагрузка на валу исследуемого двигателя создается генератором М2. Величина нагрузки плавно регулируется автотрансформатором TV1 и ступенчато контакторами КМ1- КМ3. Приведенная схема на рисунке 1 не может быть использована для практического выполнения опытов на лабораторной установке, так как данная лабораторная установка давно устарела и ее уже давно никто не включал. А если и включал, то все равно она не работала. Но не это главное. Главное – знания, ведь знания – сила. А еще вся сила в правде. Но продолжим.
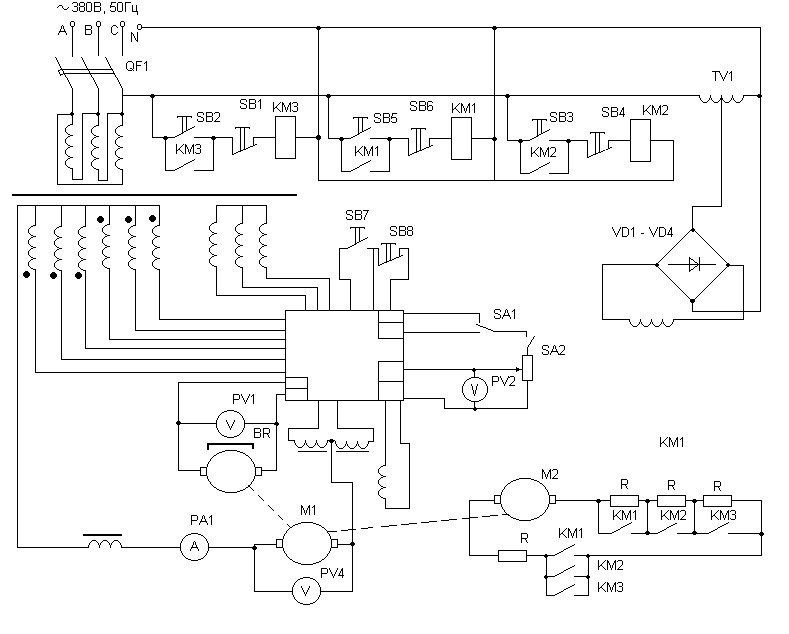
Рисунок 1 – Схема электрическая принципиальная лабораторной установки
Расчёт регуляторов тока и скорости.
Составим структурную схему всей системы:
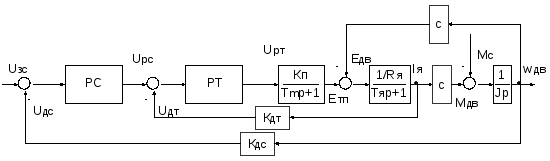
Рис.1.Структурная схема всей системы.

Рис.2.Структурная схема контура тока при настройке на оптимум по модулю.
Передаточная функция регулятора тока, настроенного на модульный оптимум имеет следующий вид:
![]() ,
,
где, Тm—малая постоянная времени;
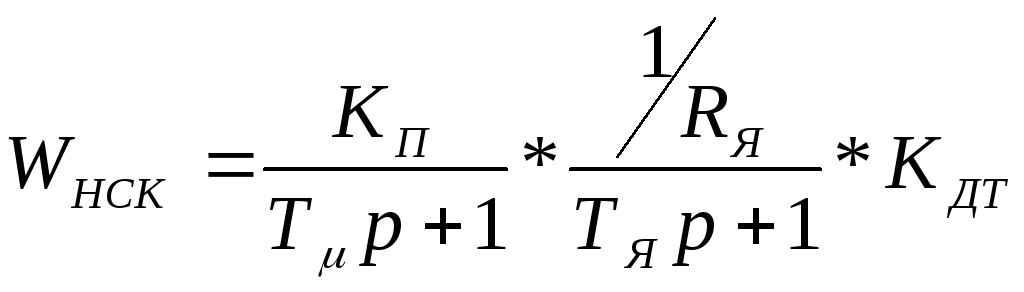
Wнск—передаточная некомпенсированной системы.
Для определения передаточной функции нескомпенсированной системы необходимо записать передаточную функцию разомкнутого контура тока без учета передаточной функции регулятора тока. Для этого размыкаем обратную связь и получаем:
Тогда передаточная функция регулятора тока будет иметь вид:
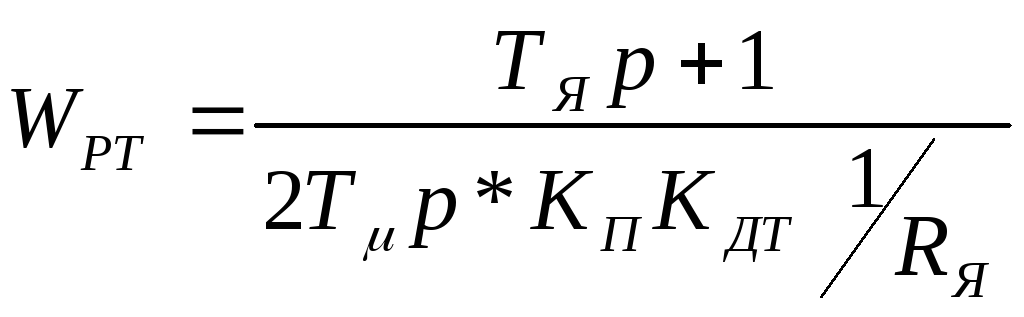
Регулятор тока представляется в виде ПИ-регулятора.
Для расчета регулятора скорости представим контур тока в виде звена:
Структурная схема контура скорости имеет следующий вид:
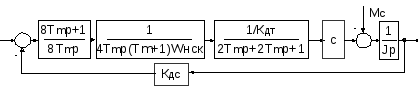
Рис.3.—Контур скорости с регулятором
Передаточная функция регулятора скорости настроенного на симметричный оптимум имеет вид:
![]() ,
,
Прежде всего необходимо определить малую постоянную времени контура скорости; для этого примем:
![]() ,
а
,
а
![]()
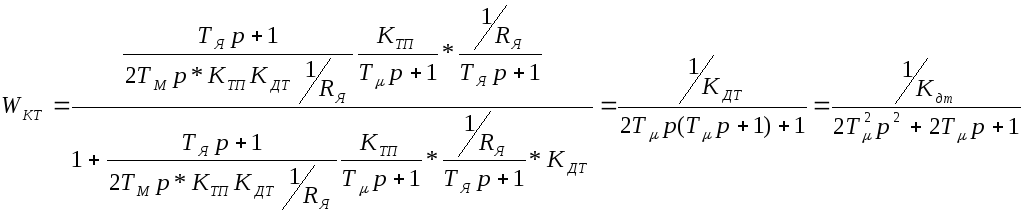
Для определения передаточной функции нескорректированной системы необходимо записать передаточную функцию разомкнутого контура скорости без учета регулятора:
![]()
Тогда передаточная функция регулятора скорости будет иметь вид:
 ,
,
Регулятор скорости представлен в виде ПИ-регулятора.
Тогда структурная схема всей системы будет выглядеть:
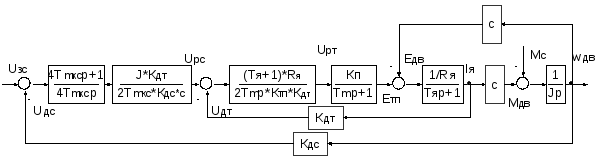
Рис.4.Структурная схема всей системы.
Воспользуемся математическим пакетом MATLAB и смоделируем динамические процессы в системе:
Замкнутая система электропривода.
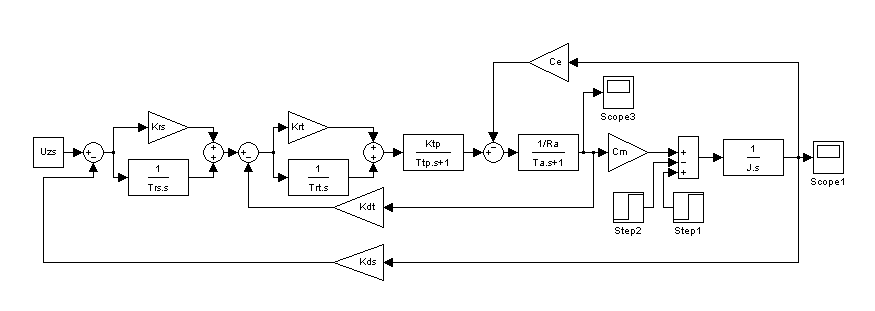 Рис.5.-Структурная
схема ЭП.
Рис.5.-Структурная
схема ЭП.
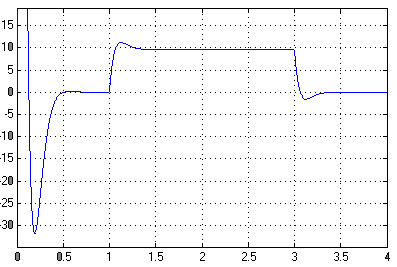
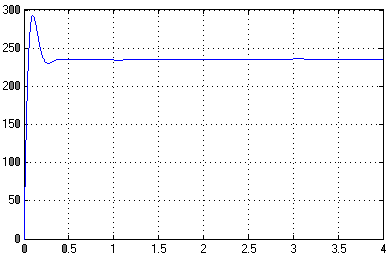
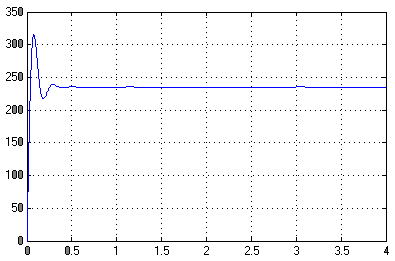
Переходные процессы при набросе и сбросе нагрузки и при изменении параметров регулятора скорости
1.График изменения скорости
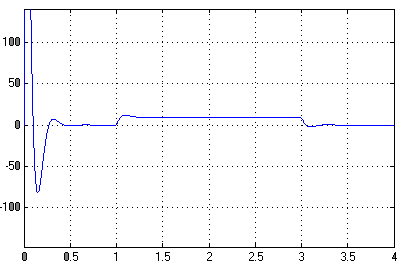
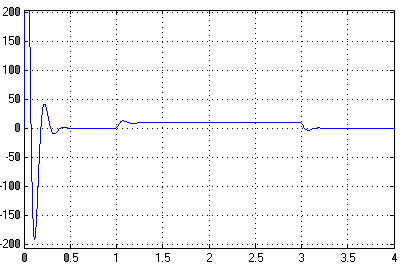
2.График изменения тока якоря
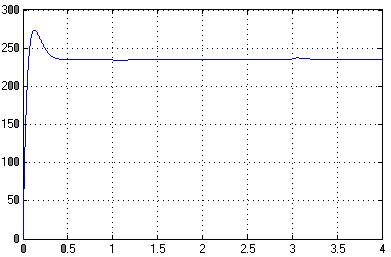
1.График изменения скорости:
2.График изменения тока якоря ДПТ:
1.График изменения скорости:
2.График изменения тока якоря ДПТ