

|
Содержание | ||
|
|
стр. | |
|
|
| |
|
Введение……………………………………………………………….. |
2 | |
|
|
| |
|
Расчет и построение механических и электромеханической характеристик асинхронного двигателя…………………. |
3 | |
|
|
| |
|
Пример расчета механических характеристик асинхронного двигателя типа 4А200М6 ОМ2 ………………………………….. |
3 | |
|
1. |
Расчет исходных данных двигателя |
4 |
|
2. |
Расчет и построение естественной механической характеристики двигателя по формуле Клосса |
4 |
|
3. |
Расчет и построение естественной механической характеристики двигателя по формуле Клосса-Чекунова |
6 |
|
4. |
Расчет
и построение искусственной механической
характеристики при снижении напряжения
сети до значения
|
7 |
|
5. |
Расчет
и построение
искусственной механической
характеристики при снижении частоты
сети до значения f'
= 0,8
|
8 |
|
6. |
Построение
графика искусственной механической
характеристики при одновременном
снижении частоты сети до значения
|
9 |
|
|
|
|
|
Расчет и построение естественной электромеханической характеристики двигателя …………………………………….. |
10 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЛІТЕРАТУРА …………………………………………………… |
13 | |
|
|
| |
|
ПРИЛОЖЕНИЕ …………………………………………………. |
14 | |
|
|
| |
|
Приложение 1-С (варианты заданий для курсантов дневной формы обучения) ………………………………………………… |
14 | |
|
|
| |
|
Приложение 1-З (варианты заданий для студентов заочной формы обучения) ………………………………………………… |
16 | |
|
Введение
В судовом электрооборудовании электропривод является основным потребителем электроэнергии. Более 95% вырабатываемой судовыми генераторами электроэнергии преобразовывается электроприводом в механическую энергию. Десятки электрических двигателей обеспечивают высокий уровень энерговооруженности труда, рост его производительности и безопасность мореплавання. Знание свойств и возможностей электропривода позволяет судовому электромеханику обеспечить его рациональное использование с учетом требований судовых вспомогательных механизмов и требований судовых систем электроснабжения. В сфере промышленного производства и на водном траспорте потребляется большое количество механической и тепловой энергии. Электроэнергия преобразуется в механическую с помощью электрических двигателей, которые составляют основу электропривода. Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение рабочих органов, технологических машин и управления этим движением. В судовом электроприводе в качестве электродвигательного устройства в основном применяются асинхронные двигатели, поэтому программой курса «Теория электропривода» предусмотрено выполнение расчётно- графического задания, включающее порасчёт и построение механических и электромеханической характеристик асинхронного двигателя.
Расчет и построение механических и электромеханической характеристик асинхронного двигателя Задание: Для асинхронного двигателя с короткозамкнутым ротором рассчитать и построить механические характеристики: 1. естественную по формуле Клосса; 2. естественную по формуле Клосса-Чекунова; 3.
искусственную при понижении напряжения
питающей сети до значения
4. искусственную при понижении частоты тока питающей сети до значения
5.
искусственную при одновременном
понижении напряжения и частоты тока
питающей сети до значений
4. искусственную при понижении частоты тока питающей сети до значения
Для выполнения задания выбор каталожных (паспортных) данных асинхронного двигателя производится по таблицам (см. Приложение, таблица 1,2).
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |


 и напряжения до
значения
и напряжения до
значения

 ;
; ;
;
 и
и
 ;
; .
.Пример расчета механических характеристик асинхронного двигателя типа 4А200М6 ОМ2:
1.
мощность
 = 22 кВт;
= 22 кВт;
2.
напряжение
( линейное )
 =
380 В;
=
380 В;
3.
частота вращения
 =
975 об/мин;
=
975 об/мин;
4.
номинальный ток
 =
41,3 А;
=
41,3 А;
5.
коэффициент мощности
 =
0,9;
=
0,9;
6.
кратность максимального момента
 2,4;
2,4;
7.
кратность пускового момента
 =
= ;
;
8.
кратность пускового тока
 =
6,5.
=
6,5.
1. Расчет исходных данных двигателя
1. В условном обозначении типоразмера двигателя 4А200М6 ОМ2 число 6 – это число полюсов обмотки статора, т.е. 2р = 6, откуда число пар полюсов р = 3;
2. синхронная угловая скорость
 (
радиан в секунду)
(
радиан в секунду)
3. номинальная угловая скорость ротора


4. номинальное скольжение

5. критическое скольжение
 =
=
 =
0,115
=
0,115
6. критическая угловая скорость


7. номинальный момент двигателя (на валу)
 Нм
Нм
8. максимальный момент двигателя
 =
2,4*215,47 = 517,14 Нм
=
2,4*215,47 = 517,14 Нм
9. пусковой момент двигателя
 Нм
Нм
10. пусковой ток двигателя
 = 6,5*41,3 = 268,45 А
= 6,5*41,3 = 268,45 А
2. Расчет и построение естественной механической характеристики двигателя по формуле Клосса
9. В чистом виде уравнение электромеханической характеристики ω(М)
неудобное для расчета и построения её графика.
Поэтому
на практике для
построения механической характеристики
двигателя используется формула
Клосса, представляющая зависимость
электромагнитного момента от скольжения
ротора, т.е.
 ,
а неω(М):
,
а неω(М):
 (1)
(1)
10. поскольку в теории электропривода механическая характеристика –
зависимость
угловой скорости от момента двигателя,
т.е.
 ,
а формула Клосса – зависимостьМ(s),:
,
а формула Клосса – зависимостьМ(s),:
задаются значениями скольжения от s = 0 (режим идеального холостого хода) до s = 1 (режим пуска) и подставляют эти значения одновременно в две формулы:
а) формулу Клосса, которая для данного случая имеет вид


б) формулу угловой скорости ротора, которая для данного случая имеет вид
 (2).
(2).
В этом случае для каждого нового значения скольжения s рассчитываются два параметра: момент М и угловая скорость ω, представляющие собой координаты точек механической характеристики ω(М), что и требовалось найти.
11. результаты расчета приведены в таблице 1
Таблица 1.
Координаты точек механической характеристики асинхронного двигателя (формула Клосса)
|
s |
M, Нм |
ω,
|
|
0 |
0 |
104,7 |
|
0,015 |
132,65 |
103,13 |
|
0,03 |
252,62 |
101,5 |
|
0,05 |
378,19 |
99,5 |
|
0,08 |
484,86 |
96,3 |
|
0,1 |
512,13 |
94,2 |
|
0,115 |
517,14 |
92,7 |
|
0,13 |
513,28 |
91,1 |
|
0,15 |
499,41 |
89,0 |
|
0,2 |
446,94 |
83,7 |
|
0,25 |
392,68 |
78,5 |
|
0,35 |
306,72 |
68,0 |
|
0,5 |
225,93 |
52,3 |
|
0,7 |
165,45 |
31,4 |
|
0,85 |
137,42 |
15,7 |
|
1,0 |
117.39 |
0 |

График этой механической характеристики А1-В1-С1 обозначен на рис.1 цифрой
«1».
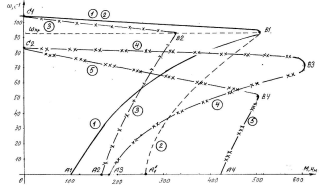
Рис. 1. Механические характеристики асинхронного двигателя типа 4А200М6 ОМ2 естественные по формуле Клосса (1) и Клосса-Чекунова (2); искусственные при снижении напряжения (3), частоты тока (4) и одновременно напряжения и частоты
На этой и остальных характеристиках буквенные обозначения соответствуют таким режимам: точка А – пуск двигателя;
точка В – работа с критическими моментом и частотой вращения;
точка С – режим идеального холостого хода.