

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Раздел3_3
.doc
![]() ,
,
![]() падение
скорости двигателя при изменении его
нагрузки от идеального холостого хода
до
падение
скорости двигателя при изменении его
нагрузки от идеального холостого хода
до
![]() ;
;
![]() .
.
Реакция двигателя по возмущению
 .
(3.21)
.
(3.21)
3.3. Математические модели асинхронного двигателя
Состояние многофазной машины переменного тока в стационарном и переходном режимах описывается потокосцеплениями обмоток статора s и ротора r, а также угловой скоростью ротора . Потокосцепления являются направленными величинами, вращающимися в плоскости, перпендикулярной оси двигателя. Если считать эту плоскость комплексной, то потокосцепления могут быть представлены векторами. Эти векторы непосредственно связаны с векторами токов статора и ротора:
![]() ; (3.22)
; (3.22)
![]() .
(3.23)
.
(3.23)
где is, ir' ток статора и приведенный ток ротора,
Ls, Lr, Lm индуктивности обмоток статора, ротора и намагничивания.
Каждый вектор тока и пропорциональный ему вектор потока равен геометрической сумме компонент, образуемых в отдельных фазах. Для трехфазной обмотки, оси которой смещены в пространстве на 120, результирующий вектор тока будет
![]() .
(3.24)
.
(3.24)
Токи в фазах можно определить из проекции
вектора тока на соответствующие оси
обмоток. Например,
![]() .
.
Изложенная методика применима непосредственно к линейным, симметричным машинам с синусоидальным распределением потока, питающимся от симметричной сети синусоидальными напряжениями и токами. Путем определенного расширения математического описания могут быть учтены такие факторы, как несимметрия поля, высшие гармоники, переменные параметры.
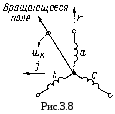
В координатной системе, вращающейся относительно оси обмотки (рис.3.8) с угловой скоростью k, для каждой трехфазной обмотки справедливо уравнение
![]()
 ,
(3.25)
,
(3.25)
где индексом k у символов векторов обозначена выбранная координатная система.
В часто применяемой координатной системе, вращающейся синхронно с частотой статора, можно записать следующее уравнение напряжений для статора двигателя:
![]() , (3.26)
, (3.26)
где Rs, s активное сопротивление обмоток статора и угловая частота поля статора; соответственно для ротора
![]() ,
(3.27)
,
(3.27)
где ![]() ,
r
приведенное активное
сопротивление обмоток ротора и угловая
частота тока ротора.
,
r
приведенное активное
сопротивление обмоток ротора и угловая
частота тока ротора.
Мощность одной фазы двигателя
![]() ,
(3.28)
,
(3.28)
где символ * означает комплексно-сопряженный вектор.
Момент двигателя соответственно будет
![]() ,
(3.29)
,
(3.29)
где zp число пар полюсов машины,
ks,
kr
коэффициенты электромагнитной связи
статора (![]() )
и ротора (
)
и ротора (![]() ).
).
Уравнения (3.22) – (3.29) полностью описывают поведение асинхронного двигателя. Потери на перемагничивание, а также на вихревые токи здесь не учтены. Для описания динамики с помощью структурной схемы все векторы разлагают на скалярные компоненты
![]() .
.
На рис.3.9 приведена полная структурная схема с входными величинами us, us, Mc, s и выходными is, is, , где Мс, момент сопротивления и угловая частота двигателя. Она представляет асинхронную машину как сложную нелинейную систему с шестью мультипликаторами и несколькими интегральными звеньями.
Расчет установившихся и переходных процессов в АЭП обычно осуществляется с помощью метода Парка-Горева путем представления асинхронного двигателя (АД) системой нелинейных дифференциальных уравнений, преобразующих трехфазную систему в двухфазную.
При составлении математической модели используются следующие допущения: фазные обмотки симметричны, потери в стали и зубцовые явления отсутствуют, намагничивающая цепь линейна, намагничивающие силы каждой обмотки и магнитная индукция в воздушном зазоре распределены по окружности статора (ротора) синусоидально, параметры ротора приведены к цепи статора.
В
3.9. Полная структурная схема асинхронного
двигателя,
управляемого напряжением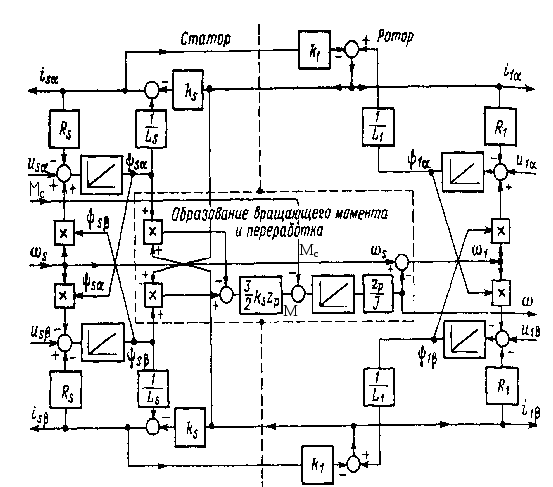 АД вследствие равномерности воздушного
зазора магнитные сопротивления остаются
постоянными при любых взаимных
расположениях обмоток статора и ротора.
Поэтому для описания АД можно использовать
любую ортогональную систему координат,
вращающуюся в пространстве с произвольной
скоростью. Эти уравнения в векторной
форме, записанные во вращающейся с
произвольной частотой системе координат,
имеют следующий вид:
АД вследствие равномерности воздушного
зазора магнитные сопротивления остаются
постоянными при любых взаимных
расположениях обмоток статора и ротора.
Поэтому для описания АД можно использовать
любую ортогональную систему координат,
вращающуюся в пространстве с произвольной
скоростью. Эти уравнения в векторной
форме, записанные во вращающейся с
произвольной частотой системе координат,
имеют следующий вид:
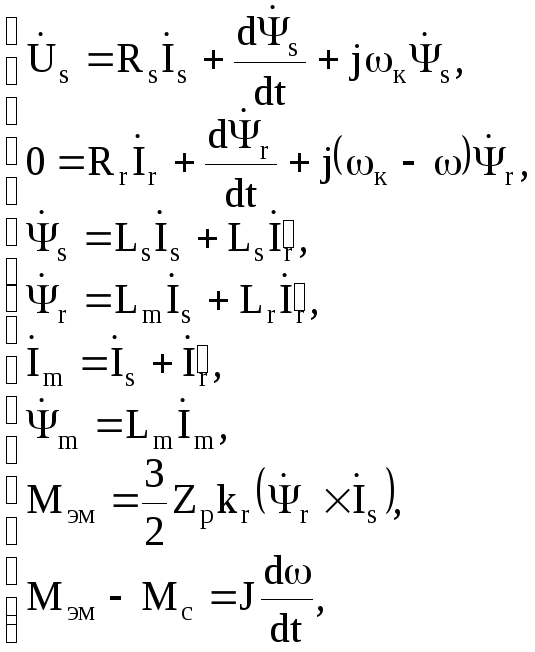 (3.30)
(3.30)
где ![]() ,
,
![]() ,
,
![]() – результирующие векторы напряжения,
тока и потокосцепления статора;
– результирующие векторы напряжения,
тока и потокосцепления статора;
![]() ,
,
![]() – те же параметры для ротора;
– те же параметры для ротора;
![]() ,
,
![]() – результирующие вектора тока
намагничивания и потокосцепления в
воздушном зазоре;
– результирующие вектора тока
намагничивания и потокосцепления в
воздушном зазоре;
Ls=Ls+Lm, Lr=Lr+Lm – полные индуктивности соответственно статора и ротора (Ls, Lr – соответственно индуктивности рассеяния статора и ротора, Lm – индуктивность контура намагничивания);
, к – электрическая частота вращения ротора асинхронного двигателя (АД) и частота вращения системы координат;
Zp – число пар полюсов;
М, Мс – электромагнитный момент двигателя и момент сопротивления нагрузки;
J – момент инерции двигателя;
![]() – электромагнитная постоянная времени
роторной цепи;
– электромагнитная постоянная времени
роторной цепи;
i,
2i
– соответственно частота вращения
вектора
![]() и относительное скольжение ротора
относительно
и относительное скольжение ротора
относительно
![]() .
.
Конфигурация структурной схемы асинхронного двигателя зависит от выбранного типа модели и системы координат. Рассмотрим формирование структурных схем двухфазных моделей со скоростью вращения координатной системы k=0 и k=s.
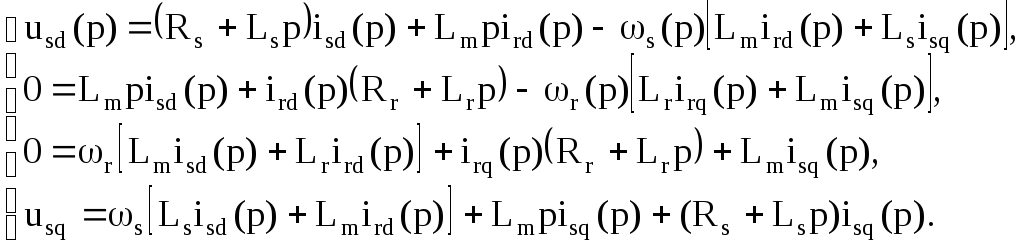
Для составления структурной схемы в неподвижных осях используем систему уравнений (2.30) /10/, а также уравнение момента двигателя, записанное в проекциях на оси,
![]() (3.31)
(3.31)
и уравнение движения
![]() . (3.32)
. (3.32)
В уравнении (3.31) множитель Zp есть реальное число пар полюсов машины, так как двухфазная модель была получена из условия рп=1. Кроме того, множитель 2/3 компенсирует увеличение момента в 1,5 раза из-за роста амплитуд переменных, полученных проецированием результирующих векторов на оси d и q. Тогда укрупненную структурную схему можно составить непосредственно на основании (2.30) /10/, (3.31) и (3.32), преобразовав уравнение движения по Лапласу (рис.3.10).
П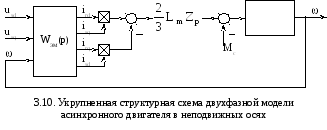 олученная
структурная схема (рис.3.10) содержит
изображения переменных u, i,
M,
(для краткости аргумент р опущен),
причем оригиналы u, i
являются произведением двух функций –
времени и угловой частоты. Это является
одним из неудобств неподвижной системы
координат. По этой причине ее обычно
используют для исследования режимов
при =const
или =0.
олученная
структурная схема (рис.3.10) содержит
изображения переменных u, i,
M,
(для краткости аргумент р опущен),
причем оригиналы u, i
являются произведением двух функций –
времени и угловой частоты. Это является
одним из неудобств неподвижной системы
координат. По этой причине ее обычно
используют для исследования режимов
при =const
или =0.
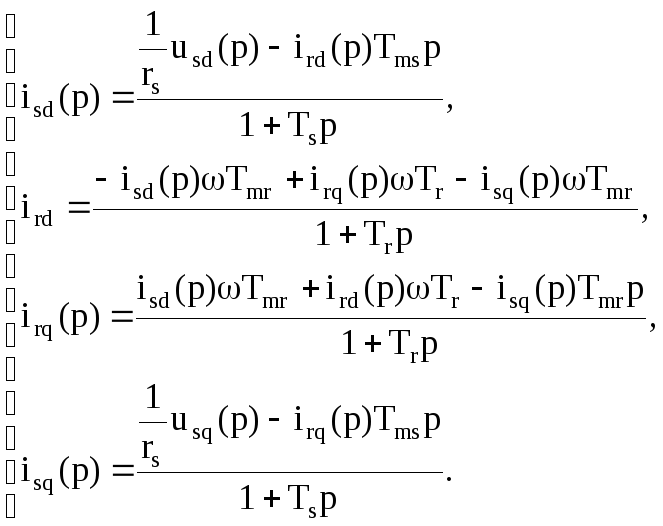 (3.33)
(3.33)
В уравнениях (3.33) Ts=Ls/Rs; Tr=Lr/Rr; Tms=Lm/Rs; Tmr=Lm/Rr.
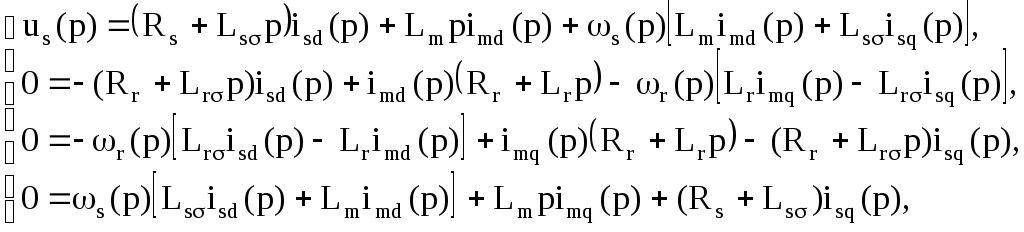
Для анализа переходных процессов при переменной скорости удобнее пользоваться моделями в синхронных осях. Тогда для описания электромагнитных процессов заменим в уравнениях (2.30) /10/ k на s и с учетом s=r запишем систему
 (3.34)
(3.34)
В этой системе уравнений оригиналы электромагнитных переменных являются только функциями времени и представляют собой амплитуды соответствующих переменных. Однако структурная схема, полученная на основе решения уравнений (3.34), будет неудобна тем, что в ней за одну из переменных выбран ток ротора, непосредственно воздействовать на который не представляется возможным. В то же время с помощью регулятора ЭДС можно регулировать намагничивающий ток im или потокосцеплениеm. Поэтому, учтя, что im=is+ir, заменим в (3.34) переменную ir на im. Кроме того, поскольку в выбранной системе координат пространственные векторы вращаются синхронно с осями, ориентируя ось d по вектору us, для двухфазной модели будем иметь usq(p)=0. Тогда после преобразования перепишем (3.34) относительно is и im:
 (3.35)
(3.35)
где Ls, Lrs – индуктивности рассеяния фаз статора и ротора,
Ls=Ls–L, Lrs=Lr–L.
В этом случае для момента получим выражение
![]() .
(3.36)
.
(3.36)
Структурные схемы для модели в синхронных осях, составленные на основании (3.35), (3.36), приведены на рис.3.11. В обеих схемах входными воздействиями являются амплитуда (или действующее значение) напряжения us, синхронная угловая частота s и угловая частота тока ротора r, однако при независимом управлении частотой (рис.3.11,а) зависимой переменной является r, а при зависимом управлении – синхронная угловая частота s.
а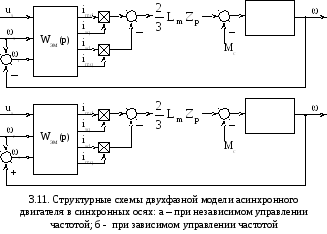 )
)
б)
Изложенные варианты моделей не содержат в явном виде функциональных связей между полярными координатами вектора тока статора и момента, что затрудняет синтез управляющей части электропривода, которая строится на основе модели роторной цепи асинхронной машины (АМ).
Для получения соответствующей модели
рассмотрим векторную диаграмму АМ в
системе координат (0,1,2), вращающейся со
скоростью вектора тока статора, причем
ось 1 совмещена с вектором
![]() .
Величина М однозначно
определяется модулями векторов
.
Величина М однозначно
определяется модулями векторов
![]() и
и
![]()
![]() и
углом между ними
во всех режимах работы асинхронной
машины
и
углом между ними
во всех режимах работы асинхронной
машины
![]() (3.37)
(3.37)
Структура роторной цепи будет иметь вид, изображенный на рис.3.12,а. Она построена на основе уравнений:
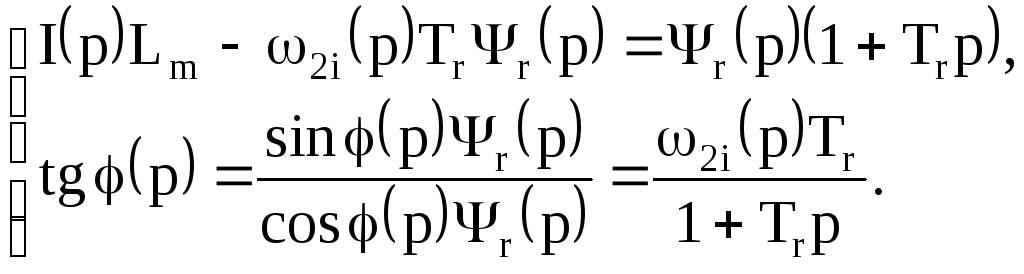 (3.38)
(3.38)
Анализ структуры АМ показывает, что роторная цепь представляет собой систему с параметрической обратной связью. Вход по модулю вектора тока статора является аддитивным, а по скольжению – параметрическим. Системы с параметрической обратной связью обладают свойствами нелинейных, адаптивных и самонастраивающихся систем. Возможности по совершенствованию динамических характеристик АМ при использовании методов нелинейной коррекции шире, чем линейной.
Дальнейшее упрощение модели связано с линеаризацией уравнений АМ. Рассмотрим приращение функции F=2ir в окрестности точки М0(2i0, r0):
 (3.39)
(3.39)
Структура линеаризированной модели АМ
приведена на рис.3.12,б.
Анализ моделей показывает, что характер
переходных процессов зависит не только
от
![]() ,
но и от
,
но и от
![]() .
.
Режим
управления с
![]() =
const
используется чаще всего в так называемых
частотно-токовых электроприводах.
Структура роторной цепи преобразуется
в обычное колебательное звено. Задавая
различные величины скольжения, можно
менять как эквивалентную постоянную
времени звена Tv,
коэффициент демпфирования ξ,
так и коэффициент передачи kv:
=
const
используется чаще всего в так называемых
частотно-токовых электроприводах.
Структура роторной цепи преобразуется
в обычное колебательное звено. Задавая
различные величины скольжения, можно
менять как эквивалентную постоянную
времени звена Tv,
коэффициент демпфирования ξ,
так и коэффициент передачи kv:
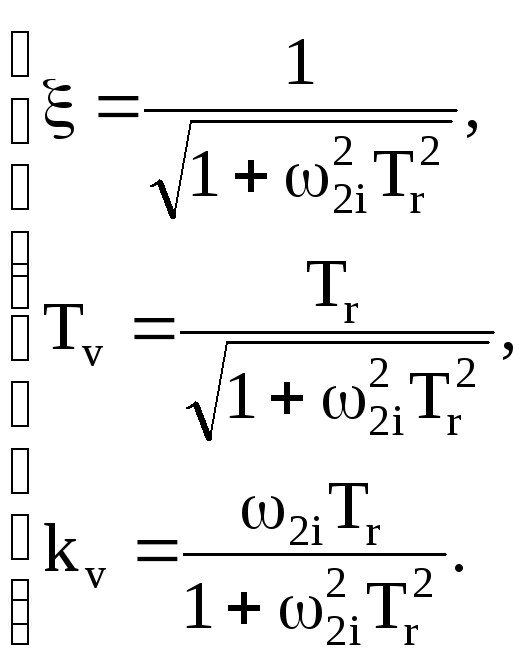 (3.40)
(3.40)
Зависимости
![]() и
и
![]() приведены на рис.3.13,а,б. Как следует из
рисунка, при
приведены на рис.3.13,а,б. Как следует из
рисунка, при
![]() достигается максимальность коэффициента
kv.
В соответствии со структурой электропривода
как системы формирования и
передачи сигнала М
это означает, что при
достигается максимальность коэффициента
kv.
В соответствии со структурой электропривода
как системы формирования и
передачи сигнала М
это означает, что при
![]() амплитуда передаваемого сигнала
максимальна. При этом коэффициент
демпфирования ξ
равен
амплитуда передаваемого сигнала
максимальна. При этом коэффициент
демпфирования ξ
равен
![]() ,
что соответствует настройке колебательного
звена на "модульный" оптимум.
,
что соответствует настройке колебательного
звена на "модульный" оптимум.
С целью анализа разработанной модели
произведено моделирование уравнений
(3.38) в МАТLАВ. На рис.3.14 и
рис.3.15 приведены машинная модель АМ при
![]() =
const и переходные характеристики
по М при скачке
задания по
=
const и переходные характеристики
по М при скачке
задания по
![]() .
.
а)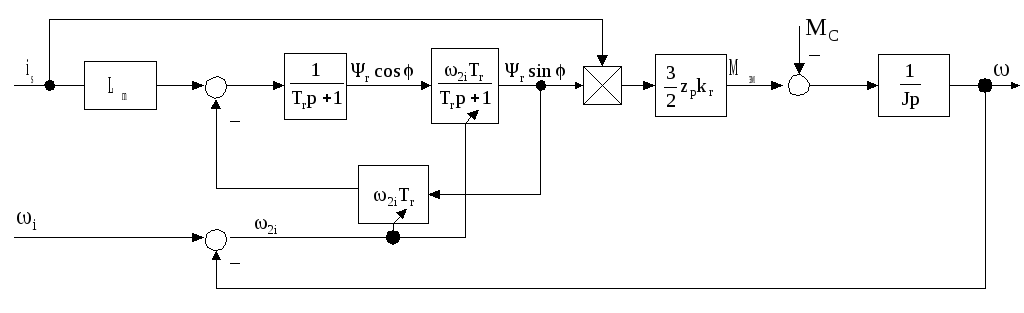
б)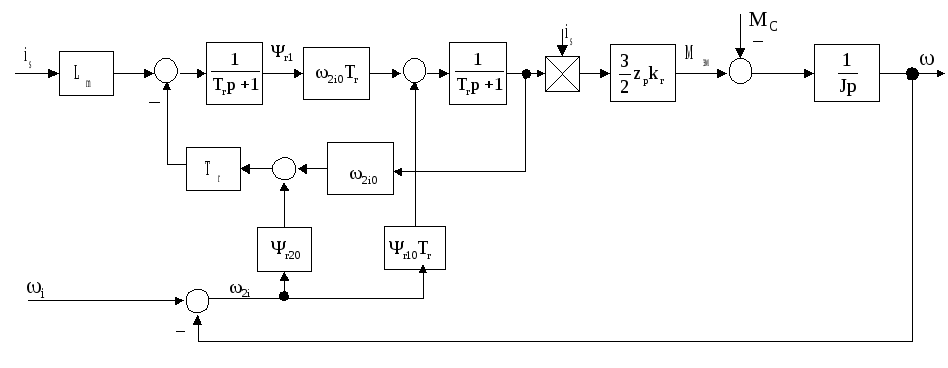
Рис.3.12. Модель АМ как объекта с параметрической связью (а), вариант линеаризованной модели (б)

Рис.3.13. Зависимости коэффициента передачи k (а) и коэффициента демпфирования (б) от частоты скольжения
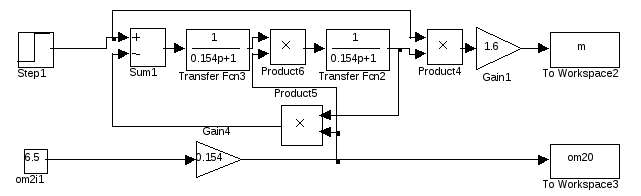
Рис.3.14. Структура роторной цепи асинхронной машины
2i=1/2Tr
2i=2/Tr
2i=1/Tr
M, Нм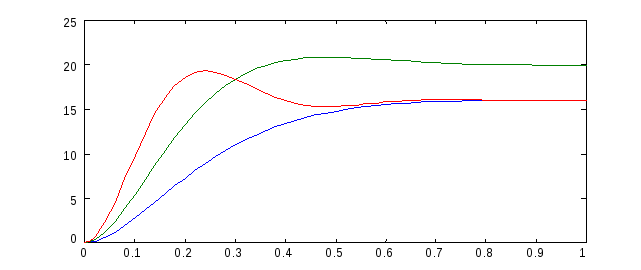
Р
t, с
по моменту при 2i=const
Регулирование момента связано с изменением потокосцепления ротора и достигается за счет взаимосвязанного регулирования амплитуды и фазы вектора тока статора:
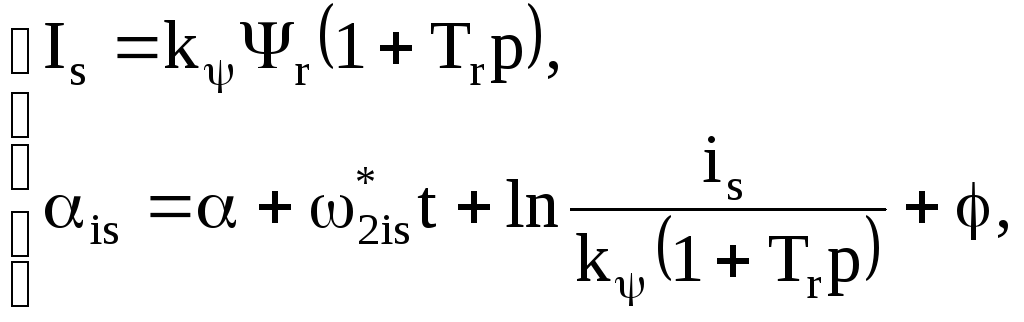 (3.41)
(3.41)
где
![]()
![]()
Анализ полученных в (3.41) выражений показывает, что для управления М в динамике необходимо формировать токи статора не только в функции угла поворота ротора и заданного момента, но и в функции других переменных состояния, причем вид сигналов управления определяется принятым законом частотного управления /10/.