

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Раздел7_4
.doc7.4. Программная система машинного анализа и синтеза систем (МАСС)
К программным комплексам с большими возможностями относится система МАСС (машинного анализа и синтеза систем), позволяющая исследовать САУ во временной области. Система МАСС предназначена для широкого класса САУ (линейных, нелинейных, импульсных, цифровых) во временной области. При этом основным инструментом исследования является построение переходного процесса в системе при определенных начальных условиях и выходных воздействиях, а также может быть проведена оптимизация параметров исследуемой системы (модели). Результаты работы рассчитанные зависимости, выводятся в виде таблиц или графиков. Программная система МАСС представляет собой увязанный воедино комплекс программ-модулей (сегментов), каждый из которых является логически законченным алгоритмом, и выполняет определенную, относительно сложную функцию (рис.7.12).
Отметим основные особенности МАСС:
1. Система обеспечивает интерактивный режим взаимодействия пользователя с ЭВМ. Пользователю требуется давать правильные ответы на вопросы, задаваемые машиной, последовательность которых определяет ЭВМ.
2. Программная система работает в динамическом режиме, то есть в каждый момент времени в оперативном запоминающем устройстве (ОЗУ) ЭВМ находятся корневой модуль и один из программных модулей, выполняющий требуемую функцию, например ввод структуры САУ и т.д. Все остальные модули находятся на внешнем запоминающем устройстве (ВЗУ) и вызываются в ОЗУ по мере необходимости корневым модулем. Каждый модуль после окончания своей работы возвращает управление корневому модулю, который запускает в работу сегмент, называемый выборочной фазой программы, которая, анализируя информацию, введенную пользователем, позволяет произвести изменение структуры параметров, перейти в секцию оптимизации или в любой другой модуль, либо закончить работу программы.
3. Входной язык системы относится к языкам табличного типа и позволяет описывать САУ, заданные структурными схемами. При этом САУ разбивается на типовые функциональные блоки (интегратор, инерционное звено, инвертор, нелинейные блоки и т.д.). Функциональные блоки образуют библиотеку входного языка. Каждый блок выполняет определенную функцию, перечень которых достигает 66, в том числе: арифметические операции - 6, элементарные математические функции - 10, логические функции - 12, дискретные элементы - 6, первичные источники воздействий - 6, специальные блоки - 5. МАСС позволяет моделировать линейные и нелинейные, дискретные и непрерывные системы, статические и динамические элементы, арифметические и логические операции, запаздывание, детерминированные и логические случайные сигналы.
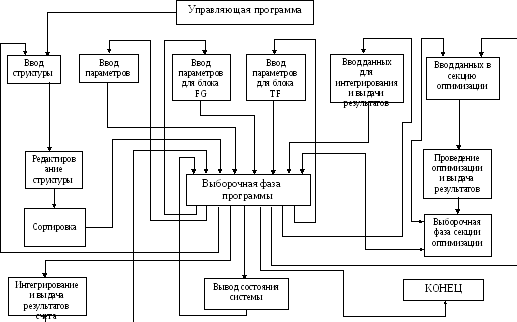
Рис.7.12. Функциональный состав программной системы МАСС
Линейные динамические звенья охватывают весь класс типовых динамических звеньев первого и второго порядка (всего 8 звеньев). Для моделирования звеньев более высокого порядка используется динамическое звено общего вида (TF), передаточная функция которого задается в виде отношения двух полиномов. Всего в схеме моделирования таких блоков должно быть не более 20.
Включение в состав библиотеки входного языка блоков, имеющих нелинейные статические характеристики, позволило проводить исследования систем и процессов, описываемых нелинейными дифференциальными уравнениями с типовыми видами нелинейностей (всего 11 звеньев). Для расширения классов нелинейностей введен генератор функций FG, позволяющий моделировать статическую нелинейную характеристику произвольного типа, задаваемую в виде последовательности координат точек.
Блоки логических функций позволяют моделировать все стандартные логические функции, функции переключения, с их помощью можно выделить экстремальные значения.
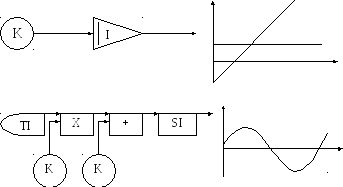
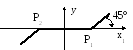
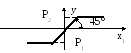
Группа блоков, имитирующих источники воздействия, позволяет моделировать любые случайные входные сигналы исследуемой задачи. Например, для моделирования сигналов типа равномерная и синусоидальная заводки собираются цепи блоков, изображенных на рис.7.13.
 X
Y Y(t)
X
Y Y(t)
X(t) Y(t) = Zt
X(t)
t
а)
Y
Y(t)=sin(t+Yο)
Yο t
б)
Рис.7.13. Моделирование сигналов:
а) моделирование равномерной заводки (К – константа, I – интегратор);
б) моделирование гармонического воздействия (TI – системное время; Х, + – соответственно умножитель и сумматор; SI – синус)
Расширение возможностей языка предусмотрено посредством использования специальных блоков, названных блоками пользователя. Блоки пользователя обеспечивают оператору доступ к значениям: а) независимой переменной (время); б) шага интегрирования; в) параметров всех блоков; г) переменных в любой точке схемы.
Блоки пользователя в программе МАСС оформлены в виде подпрограмм-функций. Исследователь должен подготовить собственный фрагмент программы, а затем вставить его в отмеченное место исходного алгоритма, не забыв при этом описать переменные и массивы, используемые во фрагменте.
Получение модели исходной системы или процесса для исследования ее с помощью программной системы МАСС заключается в составлении из элементов входного языка схемы моделирования, которая должна отражать все связи и зависимости исходной задачи. При этом необходимо руководствоваться тем, что максимальное число блоков в схеме не должно превышать 200, а порядок моделируемой системы не должен быть выше 75.
Управление программной системой МАСС, ввод исходной информации, необходимой для интегрирования и оптимизации, осуществляется с помощью директив и операторов. Всего в программной системе используется 10 директив: 1) режим; 2) структура; 3) параметры; 4) TF - блок; 5) FG - блок; 6) оптимизация; 7) ввод; 8) интегрирование; 9) вывод; 10) конец (табл.9.4). В табл.7.4 директивы 29 могут быть использованы многократно как при первом обращении к программе, так и при необходимости изменять те или иные параметры. Директива :КОНЕЦ является последней директивой в пакете заданий, не считая директив или операторов языка управления самой ЭВМ.
4. Для решения составленной системы дифференциальных уравнений, описывающих исходную схему моделирования, используются численные методы интегрирования с постоянным и переменным шагом:
1) модифицированный метод Эйлера;
2) усовершенствованный метод Эйлера;
3) метод Рунге-Кутта четвертого порядка.
Метод, величину шага, а также точность (для методов интегрирования с переменным шагом) определяет пользователь. Величина шага интегрирования должна обеспечивать устойчивость вычислительного процесса и необходимую точность, поэтому его надо задавать величиной на порядок меньше самой малой постоянной времени в исследуемой модели. Если первоначальная величина шага оказалась слишком большой, так что вычислительный процесс имеет тенденцию к расходимости, пользователь должен уменьшить шаг интегрирования и повторить расчет.
5. В состав программной системы входят оптимизационные процедуры позволяющие решать задачи параметрической оптимизации САУ. Библиотека оптимизационных процедур включает алгоритмы Розенброка, симплекс метода, случайного поиска, Фибоначчи и Гауса-Зейделя. Поиск выполняется автоматически с возможностью вмешательства пользователя.
Таблица 7.4
ДИРЕКТИВЫ ПРОГРАММНОЙ СИСТЕМЫ МАСС
|
|
Директивы |
Назначение |
|
I |
II |
III |
|
1. |
:РЕЖИМ |
Директива : РЕЖИМ вводится один раз и должна быть первой директивой в пакете заданий. Она устанавливает режим работы программы, при котором в случае обнаружения ошибки после выдачи диагностического сообщения программа ждет повторного ввода. При отсутствии директивы после диагностики задание снимается. |
|
2. |
:СТРУКТУРА |
Эта директива должна следовать за директивой :РЕЖИМ. Она дает возможность перейти в сегмент, осуществляющий ввод или изменение схемы моделирования системы. Повторное использование директивы :СТРУКТУРА воспринимается системой как желание пользователя изменить структуру. |
|
3. |
:ПАРАМЕТРЫ |
Указывает на необходимость перейти в секцию ввода параметров. |
|
4. |
:TF – БЛОК |
Указывает на необходимость перейти в секцию ввода параметров для линейного звена общего вида (блок TF). |
|
5. |
:FG – БЛОК |
Указывает на необходимость перейти в секцию ввода абсцисс и ординат для генератора функций. |
|
6. |
:ОПТИМИЗАЦИЯ |
Позволяет перейти в секцию оптимизации. |
|
7. |
:ВВОД |
Позволяет перейти в секцию, осуществляющую ввод данных, необходимых для интегрирования и выдачи результатов. |
|
8. |
:ИНРЕГРИРОВА НИЕ |
Указывает на необходимость начать процесс вычисления. |
|
9. |
:ВЫВОД |
Позволяет перейти в секцию, в которой можно осуществить вывод на печать состояния системы по окончании интегрирования, получить процессы для наилучшего из просчитанных вариантов при оптимизации, а также построить графики для накопленных в процессе интегрирования и оптимизации данных. |
|
10. |
:КОНЕЦ |
Выход из программы системы МАСС. |
В качестве оптимизируемых переменных может выбираться любой параметр любого блока схемы моделирования, за исключением генератора функций и линейного динамического звена общего вида. Необходимо иметь в виду, что максимальное число параметров оптимизации равно 10.
Подготовка исходных данных для расчета САУ
Весь процесс исследования с помощью МАСС можно разбить на два этапа: 1) подготовительный этап и 2) этап непосредственного исследования системы.
На подготовительном этапе исследователь, используя библиотеку входного языка (табл.7.5), составляет схему моделирования для исследуемой САУ, для чего:
1) из библиотеки выбираются те блоки, которые реализуют требуемые функциональные зависимости;
2) рисуется схема моделирования, в которой блоки соединяются в порядке, диктуемом структурной схемой исследуемой САУ;
3) каждому блоку полученной схемы присваивается свой, отличный от других, номер - произвольное положительное число от 1 до 200;
4) составляется описание операторов параметров, а также описание операторов блоков генераторов функций и блоков общего вида, если такие блоки имеются в схеме моделирования;
5) выбирается метод интегрирования, величина шага, интервал наблюдения за моделью, дискретность выдачи результатов для заданных переменных.
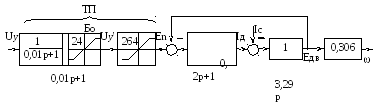
Рассмотрим изложенное на примере системы тиристорный преобразователь-двигатель (ТП-Д), приведенной на рис.7.14.
![]()
![]()
![]()
![]()
Рис.7.14. Структурная схема управления ТП-Д с числовыми данными:
Бо - блок ограничения; ТП - тиристорный преобразователь; Тп>Тэ, Тм - соответственно постоянные времени тиристорного преобразователя, цепи якоря, электромеханическая; Еn - ЭДС ТП; Iс - ток нагрузки; Едв - ЭДС двигателя
Используя проблемно-ориентированный язык МАСС (табл.7.5), построим исследуемую модель управления электроприводом в виде стандартных блоков, придав им произвольную нумерацию (рис.7.15).
Таблица 7.5
Библиотека проблемно ориентированного языка МАСС
|
Тип блока |
Языковый символ |
Графическое изображение |
Функция |
|
1 |
2 |
3 |
4 |
|
|
+ |
|
|
|
|
|
|
|
|
|
/ |
|
|
|
|
G |
G |
|
|
|
SI |
SI |
|
|
|
EX |
EX |
|
|
в степень |
AX |
AX |
|
 Сумматор
Сумматор Умножитель
Умножитель Делитель
Делитель Усилитель
Усилитель Синус
Синус Показательная
функция
Показательная
функция Возведение
ВозведениеПродолжение табл.7.5
|
1 |
2 |
3 |
4 |
|||
|
|
LN |
LN |
|
|||
|
|
SR |
SR |
|
|||
|
|
I |
|
|
|||
|
|
DI |
DI |
|
|||
|
звено |
AN |
AN |
|
|||
|
звено |
EI |
EI |
|
|||
|
|
TF |
TF |
|
|||
 Логарифм
натуральный
Логарифм
натуральный Корень
квадратный
Корень
квадратный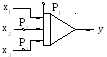 Интегратор
Интегратор Дифференци-рование
Дифференци-рование Инерционное
Инерционное Упругое
Упругое Звено
общего вида
Звено
общего вида
Окончание табл.7.5
|
1 |
2 |
3 |
4 |
|
Нечувствительность
|
D |
|
|
|
Ограничение (насыщение)
|
L |
|
|
|
Скачок
|
S |
|
|
|
x1 Генератор функций
|
FG |
|
|
|
Константа
|
К |
|
Y=PI |
|
Системное время
|
TI |
|
Y=t |
|
Блок пользователя
|
S1…S5 |
|
Алгоритм работы блока пользователь записывает на Фортране. |
|
Изменение шага интегрирования
|
IN |
|
Пока х10, установить шаг интегрирования, равный Р1. При х1=0 шаг прежний. |








В схеме (рис.7.15) действуют два возмущающих фактора: со стороны управления (Uу) и со стороны приложения нагрузки (Тс). Полагаем, что возмущения действуют в виде скачка, поэтому будем использовать два генератора (блоки 1 и 19) в виде "К"-блоков (константа). Знак "минус" на входе суммирующего блока 13 говорит о том, что эта связь (по току нагрузки) отрицательная и в параметрах блока это должно быть отражено.




 1
8 9 20 10 21 11
12 13 14 15
1
8 9 20 10 21 11
12 13 14 15
AN L G SI G
+
AN
+ I G












 +
+



 +
Ед
+
Ед
 Tиристорный
преобразователь Ic
19
Tиристорный
преобразователь Ic
19

Рис.7.15. Исследуемая модель управления ТП-Д в блоках языка МАСС:
AN – инерционное звено (СИФУ-8, электромагнитное запаздывание двигателя – 12); L – ограничение; G – усилитель; I – интегратор
Блоки 8,9,20,10,21 описывают функции тиристорного преобразователя. Считаем, что ТП имеет временную задержку в СИФУ, что отражается в блоке 8 (простое инерционное звено). Блок 9 - блок ограничения по управляющему напряжению Uу при синусоидальном опорном напряжении на СИФУ. Блок 20 осуществляет перевод напряжения управления в угол открывания ТП. Блок 10 служит для нахождения функции синуса от угла открывания. Блок 21 позволяет получить выходное напряжение ТП.
В блоке 11 суммируются сигналы напряжения на выходе ТП и ЭДС двигателя, инерционное звено (блок 12) реализует электромагнитное запаздывание двигателя. Влияние возмущающего воздействия в виде статической нагрузки учитывает блок 13 (блок суммирования). Интегральный блок 14 служит для учета влияния электромеханической постоянной времени (Тм) двигателя и получения ЭДС двигателя на выходе блока. Скорость вращения двигателя получают на выходе блока 15.