

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Раздел5_4
.doc5.4. Датчики угла
Это устройства, преобразующие угловую координату в электрическое напряжение, которое может быть использовано как сигнал обратной связи по углу или как управляющий сигнал в задающих устройствах.
В качестве примера рассмотрим широко применяющиеся в автоматизированном электроприводе трансформаторные элементы: сельсины и вращающиеся трансформаторы.
С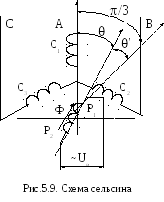 ельсин
– электрическая машина переменного
тока, имеющая две обмотки (рис.5.9),
однофазную, выполняющую роль обмотки
возбуждения;
трехфазную - обмотку синхронизации.
ельсин
– электрическая машина переменного
тока, имеющая две обмотки (рис.5.9),
однофазную, выполняющую роль обмотки
возбуждения;
трехфазную - обмотку синхронизации.
Трехфазная обмотка С1, С2, С3 расположена на статоре, однофазная обмотка P1, P2 расположена на роторе и питается переменным напряжением
Uв=Uвмsint.
Входной координатой сельсина является угол поворота ротора , выходная координата: 1) амплитуда Uвых max (для амплитудного режима работы) или 2) фаза выходного напряжения по отношению к переменному опорному напряжению, так называемый режим фазовращателя (рис.5.10).
5.4.1. Работа сельсина в амплитудном режиме
Рассмотрим амплитудный режим, когда Uвых m=f(), а =const (0 или ). На обмотку возбуждения подается напряжение переменного тока
Uв=Uвмsint. (5.21)
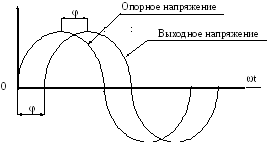 Uоп
Uоп
Uвых

Рис.5.10. Режим фазовращателя
Магнитный поток Ф, действующий по осевой линии обмотки возбуждения, наводит в обмотках статора ЭДС.
Фаза А: еа=kтUвмsint cos, (5.22)
Фаза В: ев=kтUвмsint cos(–2/3), (5.23)
Фаза С: ес=kтUвмsint cos(–4/3), (5.24)
где kт=Еm/Uвм – коэффициент трансформации между статорной и роторной обмотками при их соосном расположении. За начало отсчета принята ось фазы А.
Выходное напряжение – линейное напряжение, которое равно разности фазных ЭДС.
Например:
Uвых=еа–ев=kтUвмsintcos–cos(–2/3). (5.25)
Разность косинусов двух углов
cos–cos= –2sin(+/2)sin(–/2).
Полагая = и –2/3=, после подстановки получим
cos–cos(–2/3)= –2sin(+–2/3)/2sin(–+2/3)/2=
=
–2sin(–/3)sin/3=
–2![]() /2sin(–/3)=
/2sin(–/3)=![]() sin(/3–),
sin(/3–),
Uвых=kт
Uвмsint
sin(/3–)=kт![]() Uвмsint
sin
Uвмsint
sin![]() ,
где
,
где
![]() =/3–.
=/3–.
Для амплитудного режима характеристика управления сельсина
Uвых m=f() приобретает вид
Uвых
m=Eл
m=![]() Uвмsin
Uвмsin![]() ,
(5.26)
,
(5.26)
поскольку амплитудное значение наблюдается при t=/2.
Положительные значения Ел m=Uвых m соответствуют углу = 0, а отрицательные = (рис.5.11).
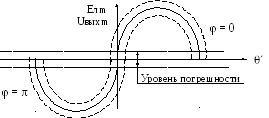
Рис.5.11. Характеристика управления сельсина
Погрешность в характеристике управления сельсина обусловлена:
1) несинусоидальностью распределения магнитной индукции ;
2) асимметрией магнитопровода;
3) неравенством параметров фаз статорной обмотки и т.п.
Погрешность зависит от класса изготовления сельсинов. Наибольшее влияние погрешности на полезный сигнал оказывают в области малых углов, где полезный сигнал соизмерим с погрешностями.
Для малых углов
![]() sin
sin![]() =
=![]() ,
тогда
,
тогда
Uвых=Ел
m=![]() kтUвм
kтUвм![]() =kс
=kс![]() .
(5.27)
.
(5.27)
Помимо указанных статических погрешностей, в сельсине при вращении ротора появляется скоростная погрешность из-за возникающей в обмотках ЭДС вращения, которая возрастает с увеличением скорости. Это накладывает ограничение на уровень скорости допустимой скоростной погрешностью. Для силовых сельсинов установлены следующие классы точности (табл.5.1).
Таблица 5.1
Классы точности силовых сельсинов
|
Класс точности |
1 |
2 |
3 |
4 |
|
Максимальная допустимая ошибка в град. |
0.75 |
1.5 |
2.5 |
5 |
5.4.2. Работа сельсина в режиме фазовращателя
В этом режиме обмотка статора получает питание от источника трехфазного напряжения с неизменной амплитудой, например для фазы А
U1Ф=U1мsint.
Протекающий по обмоткам статора переменный ток создает вращающееся магнитное поле. Величина магнитного потока в любой фиксированной точке статора, удаленной на угол относительно оси отсчета, в качестве которой принята ось фазы А (рис.5.12) выражается как
Ф=Фmaxcos(t–). (5.28)
П од
действием магнитного потока Ф, сдвинутого
на угол
=
относительно оси фазы А, в обмотке ротора
будет наводиться ЭДС
од
действием магнитного потока Ф, сдвинутого
на угол
=
относительно оси фазы А, в обмотке ротора
будет наводиться ЭДС
евых=(3/2)Е1m/kтcos(t– ), (5.29)
где Е1m – амплитуда фазной ЭДС статора.
Для работы в режиме фазовращателя характерно, что выходное напряжение Uвых m=const, а фаза выходного напряжения относительно опорного напряжения определяется углом поворота ротора , то есть характеристика управления имеет вид = f1().
Для режима фазовращателя, как следует из уравнения (5.29), характеристика управления сельсина
= . (5.30)
Помимо рассмотренного сельсина со скользящими контактами (P1, P2) все шире применяют бесконтактные, где контактный подвод тока к ротору заменен бесконтактным подводом магнитного потока (так называемое униполярное возбуждение ротора со стороны статора) или с помощью переходного кольцевого трансформатора.
Слабой стороной у бесконтактных сельсинов является двукратная передача энергии через воздушный зазор, что обусловливает у бесконтактных сельсинов большую мощность возбуждения по сравнению с контактными. У бесконтактных сельсинов более сложная конструкция и несколько выше стоимость. Однако высокая надежность этих сельсинов и меньший момент трения на валу окупает их недостатки.
5.4.3. Вращающиеся трансформаторы (ВТ)
Применяются в системах, где требуется более точное измерение угловой координаты. В ВТ высокого класса погрешность не превышает 0.01-0.02 %, что как минимум на порядок выше, чем у сельсинов первого класса точности. Наибольшее распространение получили двухполюсные и многополюсные вращающиеся трансформаторы с двумя обмотками на статоре, смещенными на электрический угол /2, и такими же обмотками на роторе. Вращающиеся трансформаторы этого типа имеют конструкцию, подобную АД с двухфазными обмотками на роторе и статоре. Схема включения питания обмоток ВТ зависит от выполняемых вращающимся трансформатором функций.
С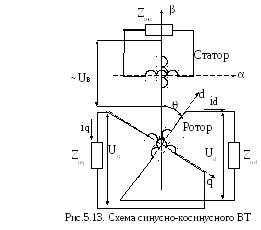 хема
синусно-конусного ВТ (СКВТ) приведена
на рис.5.13. СКВТ предназначен для
преобразования угла поворота
в два переменных напряжения Ud
и Uq,
амплитуды которых пропорциональны
соответственно cos
и sin.
Обмотка статора по оси
питается напряжением Uв=Uвмsint.
хема
синусно-конусного ВТ (СКВТ) приведена
на рис.5.13. СКВТ предназначен для
преобразования угла поворота
в два переменных напряжения Ud
и Uq,
амплитуды которых пропорциональны
соответственно cos
и sin.
Обмотка статора по оси
питается напряжением Uв=Uвмsint.
Пульсирующее магнитное поле, образуемое этой обмоткой, индуцирует в обмотке ротора по продольной оси ЭДС, пропорциональную cos, а по поперечной оси q - ЭДС, пропорциональную sin. При подключении к этим обмоткам нагрузки Zнd, Zнq в них протекают токи, образующие вторичное магнитное поле, которое искажает основное магнитное поле, и, следовательно, зависимости ЭДС в обмотках ротора от угла поворота . Во избежание этого явления прибегают к операции вторичного и первичного симметрирования поворотного вращающегося трансформатора. Для осуществления вторичного симметрирования выбирают Zнd=Zнq. Если этого недостаточно, то прибегают к первичному симметрированию, замыкая обмотку по оси на Zн, равное по величине внутреннему сопротивлению источника питания обмотки возбуждения по оси . При этом в контурах обмоток по осям и индуцируются токи, компенсирующие вторичные потоки с одинаковой интенсивностью.
С учетом сделанных замечаний режим работы ВТ оказывается близок к работе с разомкнутыми обмотками ротора, в которых пульсирующее поле обмотки возбуждения наводят ЭДС в функции угла поворота ротора:
по оси d Edм=kтUвмcos = Eмcos, (5.31)
по оси q Eqм=kтUвмsin = Eмsin, (5.32)
где kт – коэффициент трансформации между обмотками возбуждения и каждой роторной обмоткой при их соосном положении.
Как видим, представленные зависимости (5.31) и (5.32) соответствуют амплитудному режиму работы ВТ.
В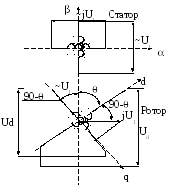 режиме
фазовращателя
обмотки статора получают питание от
источника двухфазного напряжения
(рис.5.14).
режиме
фазовращателя
обмотки статора получают питание от
источника двухфазного напряжения
(рис.5.14).
Рис.5.14. Схема фазовращателя на основе ВТ
На обмотки статора подаются напряжения, равные по амплитуде и сдвинутые на 90 град. Образующееся вращающееся поле наводит в каждой обмотке ротора ЭДС, фаза которой линейно изменяется при повороте ротора. Напряжения на обмотках ротора будут определяться взаимоиндукцией с обеими статорными обмотками.
Напряжения на обмотках ротора определяются по формулам:
Ud = kтU1(j sin + cos) = kтU1еj, (5.33)
Uq = kтU1(j cos – sin) = kтU1еj(90+). (5.34)
Учитывая, что U1 = U1m sint = U1m еjt , можно переписать:
Ud = kтU1mеjtеj, (5.35)
Uq = kтU1mеjtеj(90+). (5.36)
Из (5.35) и (5.36) следует, что напряжения на обмотках ротора по осям d и q имеют одинаковые амплитудные значения, а фаза их определяется углом поворота вала ротора , то есть характеристика управления фазовращателя описывается равенством вида
= . (5.37)