

2_kurs / Рудакова (Сигналы и Моделирование) / YP_MEP / УЧЕБНОЕ_ПОСОБИЕ / Глава3
.doc3. МОДЕЛИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ МАШИН, ПРИМЕНЯЕМЫХ В ЭЛЕКТРОПРИВОДЕ
Все электрические машины представляют собой электромеханический преобразователь для преобразования электрической энергии в механическую и обратно, хотя и могут конструктивно отличаться друг от друга. Все дело в том, что они подчиняются одним законам электромеханического преобразования энергии.
Сформулируем три таких закона:
1). Электромеханическое преобразование энергии не может осуществляться с КПД, равным 100 %.
2). Все электромеханические преобразователи (ЭМП) обратимы, то есть могут работать как в двигательном, так и в генераторном режимах.
Одним из следствий первого и второго законов является определение ЭМП как концентраторов энергии. В индуктивных электрических машинах электромагнитная энергия концентрируется в воздушном зазоре между статором и ротором. Например, в асинхронных двигателях мощность воздушного зазора составляет примерно 0,5 Вт на куб. мм.
3). Электромеханическое преобразование энергии осуществляется полями, неподвижными друг относительно друга.
Неподвижные друг
относительно друга поля ротора и статора
в воздушном зазоре машины создают
результирующее поле и электромагнитный
момент
![]() ,
где
,
где
![]()
электромагнитная мощность;
электромагнитная мощность;
![]()
угловая скорость вращения электромагнитного
поля.
угловая скорость вращения электромагнитного
поля.
Третий закон облегчает анализ процессов преобразования в ЭМП, на его основе производится запись уравнений электромеханического преобразования энергии.
3.1. Математическая модель электромеханического преобразователя энергии
Общие
законы электромеханического преобразования
энергии позволяют подходить к
математическому описанию происходящих
физических процессов с общих позиций
электромеханики, например, рассматривая
электромеханический преобразователь
энергии (ЭМПЭ) в качестве электромеханического
многополюсника, на вход которого
поступают управляющие воздействия в
виде напряжений
![]() по числу обмоток, а на выходе получают
электромагнитный момент M,
вращающий
ротор со скоростью
по числу обмоток, а на выходе получают
электромагнитный момент M,
вращающий
ротор со скоростью
![]() (рис.3.1). Представление электродвигателя
в виде электромеханического преобразователя
удобно
тем, что
дает возможность
увязать
в единое
целое
параметры
механической части через M
и
и электрическую систему управления
через напряжения U1,
U2,
,
Un,
изучая их совместное влияние на работу
электропривода.
(рис.3.1). Представление электродвигателя
в виде электромеханического преобразователя
удобно
тем, что
дает возможность
увязать
в единое
целое
параметры
механической части через M
и
и электрическую систему управления
через напряжения U1,
U2,
,
Un,
изучая их совместное влияние на работу
электропривода.
И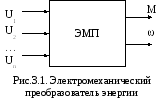 з
теории электрических машин известно,
что :
з
теории электрических машин известно,
что :
1) для непрерывного
преобразования энергии необходимо,
чтобы при
![]() по всем или части обмоток машины протекали
переменные токи, которые могут быть
получены от источников переменного
тока, а для двигателей постоянного тока
(ДПТ)
за счет коллектора или вентильного
коммутатора;
по всем или части обмоток машины протекали
переменные токи, которые могут быть
получены от источников переменного
тока, а для двигателей постоянного тока
(ДПТ)
за счет коллектора или вентильного
коммутатора;
2) электромеханическая связь в электродвигателе проявляется в наличии результирующей электродвижущей силы (ЭДС), наведенной в обмотках машины, вследствие вращения ротора;
3) процесс преобразования энергии в электрической машине математически описывается совокупностью уравнений электрического равновесия обмоток машины и уравнением электромагнитного момента.
Опираясь на общие законы электромеханического преобразования энергии, американские электрики Д. Уайт и Г. Вудсон доказали, что процессы преобразования энергии в электрической машине с n симметричными обмотками на статоре и m симметричными на роторе аналогичны двухфазной электрической машине при следующих допущениях:
1) Магнитная система обладает бесконечно большой проницаемостью и не насыщается, то есть вся энергия сосредоточена в воздушном зазоре.
2) Изменение величины зазора, обусловленное наличием пазов на роторе и статоре, не учитывается.
3) Магнитодвижущая сила (МДС) представлена первой гармоникой ступенчатой реальной МДС.
С этими допущениями двухфазную машину они назвали обобщенной электрической машиной. Важнейшим преимуществом этой машины является более простое математическое описание преобразования электрической энергии в механическую, которое описывается четырьмя уравнениями электрического равновесия (по числу обмоток) и уравнением электромагнитного момента. Электрическая схема обобщенной машины приведена на рис.3.2.
На рис.3.2 индексы 1 относятся к обмоткам статора, 2 к обмоткам ротора. Оси координат 1, 1 неподвижны относительно обмоток статора, оси 2q, 2d неподвижны относительно обмоток ротора, но вращаются относительно неподвижных осей координат 1, 1.
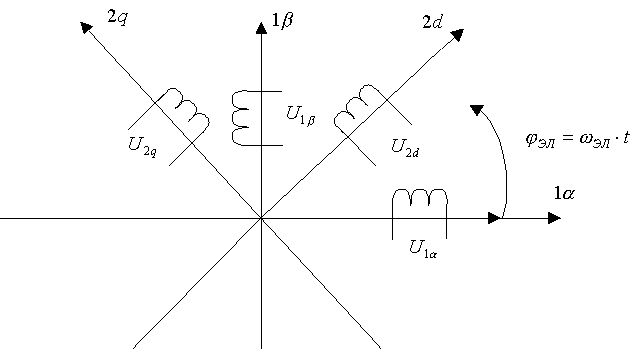
Рис.3.2. Электрическая схема обобщенной электрической машины
Благодаря
ортогональности осей координат
![]() ,
,
![]() и 2q,
2d
удалось избежать влияния взаимной
индуктивности, что способствовало
упрощению математического описания
физических процессов в обобщенной
электрической машине. Не вдаваясь в
вывод уравнений электрического
равновесия и электромагнитного момента,
который достаточно полно изложен в
работах Д. Уайта и Г. Вудсона /9/, В.И.
Ключева /10/, И.П. Копылова /11/, в качестве
примера приведем одно из уравнений
электрического равновесия и уравнение
электромагнитного момента:
и 2q,
2d
удалось избежать влияния взаимной
индуктивности, что способствовало
упрощению математического описания
физических процессов в обобщенной
электрической машине. Не вдаваясь в
вывод уравнений электрического
равновесия и электромагнитного момента,
который достаточно полно изложен в
работах Д. Уайта и Г. Вудсона /9/, В.И.
Ключева /10/, И.П. Копылова /11/, в качестве
примера приведем одно из уравнений
электрического равновесия и уравнение
электромагнитного момента:
![]() ,
,
![]() .
.
К сожалению,
полученные уравнения как электрического
равновесия, так и уравнение электромагнитного
момента являются нелинейными, поскольку
в уравнениях имеются произведения
параметров ij,
iiij,
периодические
коэффициенты
![]()
![]() в связи с зависимостью взаимной
индуктивности от координат углового
перемещения
в связи с зависимостью взаимной
индуктивности от координат углового
перемещения
![]() .
Указанные нелинейности существенно
снижают практическую ценность полученных
уравнений и сводят к минимуму преимущества
обобщенной электрической машины. Со
всей очевидностью встает вопрос о
необходимости их упрощений. Авторы
обобщенной машины успешно ответили на
этот вопрос, предложив координатные
преобразования уравнений обобщенной
электрической машины. Введя дополнительные
оси координат
.
Указанные нелинейности существенно
снижают практическую ценность полученных
уравнений и сводят к минимуму преимущества
обобщенной электрической машины. Со
всей очевидностью встает вопрос о
необходимости их упрощений. Авторы
обобщенной машины успешно ответили на
этот вопрос, предложив координатные
преобразования уравнений обобщенной
электрической машины. Введя дополнительные
оси координат![]() вращающиеся
с заданной угловой скоростью
вращающиеся
с заданной угловой скоростью
![]() ,
им удалось
получить линейные уравнения электрического
равновесия и освободиться от периодических
коэффициентов в уравнении электромагнитного
момента. Чтобы обеспечить переход от
двухфазной к трехфазной машине, авторы
использовали фазные преобразования
переменных. Указанные выше преобразования
позволяют получить из
обобщенной
электрической машины любую электрическую
машину постоянного и переменного тока.
,
им удалось
получить линейные уравнения электрического
равновесия и освободиться от периодических
коэффициентов в уравнении электромагнитного
момента. Чтобы обеспечить переход от
двухфазной к трехфазной машине, авторы
использовали фазные преобразования
переменных. Указанные выше преобразования
позволяют получить из
обобщенной
электрической машины любую электрическую
машину постоянного и переменного тока.
3.2. Математическая модель двигателя постоянного тока
В частности, применительно к двигателю постоянного тока с независимым возбуждением (ДПТ НВ) обобщенная электрическая машина после координатных преобразований принимает следующий вид (рис.3.3).
В реальном ДПТ НВ (рис.3.4) помимо обмоток
якоря (ОЯ) и возбуждения (ОВ) имеются
компенсационная обмотка (КО), закладываемая
на главных полюсах, и обмотка дополнительных
полюсов (ДП). Поскольку отмеченные
обмотки играют вспомогательную роль,
то при электромеханическом преобразовании
энергии их не принимают во внимание,
учитывая лишь активное сопротивление
и индуктивности обмоток.
реальном ДПТ НВ (рис.3.4) помимо обмоток
якоря (ОЯ) и возбуждения (ОВ) имеются
компенсационная обмотка (КО), закладываемая
на главных полюсах, и обмотка дополнительных
полюсов (ДП). Поскольку отмеченные
обмотки играют вспомогательную роль,
то при электромеханическом преобразовании
энергии их не принимают во внимание,
учитывая лишь активное сопротивление
и индуктивности обмоток.
Обмотка дополнительных полюсов обеспечивает вблизи оси щеток магнитное поле такого направления и значения, при котором процессы коммутации протекают наиболее благоприятно. Компенсационная обмотка создает магнитодвижущую силу (МДС), существенно уменьшающую размагничивающее влияние якоря.
В крупных машинах достаточно заметным оказывается влияние вихревых токов, которые возникают в массивных частях магнитной системы двигателя при изменениях магнитного потока. МДС этих токов препятствует изменению потока полюсов, замедляя процесс его нарастания и спадания. Действие вихревых токов учитывается дополнительной короткозамкнутой обмоткой ОВТ, расположенной на главных полюсах (рис.3.5).
В машине постоянного тока обмотка
возбуждения расположена на статоре и
поле возбуждения неподвижно. В якоре
создается вращающееся магнитное поле,
скорость которого равна скорости ротора,
а направление вращения поля противоположно
вращению якоря за счет коллекторно-щеточного
узла. Тем самым обеспечивается соблюдение
третьего закона электромеханического
преобразования энергии в этом двигателе.
машине постоянного тока обмотка
возбуждения расположена на статоре и
поле возбуждения неподвижно. В якоре
создается вращающееся магнитное поле,
скорость которого равна скорости ротора,
а направление вращения поля противоположно
вращению якоря за счет коллекторно-щеточного
узла. Тем самым обеспечивается соблюдение
третьего закона электромеханического
преобразования энергии в этом двигателе.
После сделанных замечаний приступим к математическому описанию физических процессов, протекающих в двигателе. Для цепи якоря:
![]() , (3.1)
, (3.1)
где
![]() ,
,![]()
активное
сопротивление и индуктивность якорной
цепи;
активное
сопротивление и индуктивность якорной
цепи;
![]() ,
где
,
где
![]()
соответственно активные сопротивления
якорной, дополнительной и компенсационной
обмоток, Ом;
соответственно активные сопротивления
якорной, дополнительной и компенсационной
обмоток, Ом;
![]() ,
где
,
где
![]()
соответственно
индуктивности якорной, дополнительной
и компенсационной обмоток, Гн;
соответственно
индуктивности якорной, дополнительной
и компенсационной обмоток, Гн;
![]() конструктивный
коэффициент, где
конструктивный
коэффициент, где
![]()
число пар полюсов,
число пар полюсов,
![]()
число активных проводников,
число активных проводников,
![]()
число пар параллельных ветвей обмотки
якоря,
число пар параллельных ветвей обмотки
якоря,
полезный магнитный поток одного полюса, Вб;
скорость якоря двигателя, с-1.
Электромагнитный
момент двигателя
![]() ,
Нм.
,
Нм.
Уравнение движения электропривода описывается уравнением 3.2.
![]() ,
(3.2)
,
(3.2)
где ![]()
приведенный момент инерции двигателя
и механизма, кгм2;
приведенный момент инерции двигателя
и механизма, кгм2;
![]() момент статического
сопротивления, для многомассовой системы
он добавляется упругим моментом, Нм.
момент статического
сопротивления, для многомассовой системы
он добавляется упругим моментом, Нм.
Для цепи возбуждения
![]() , (3.3)
, (3.3)
![]() ,
(3.4)
,
(3.4)
![]() ,
(3.5)
,
(3.5)
![]() ,
(3.6)
,
(3.6)
где
![]() и
и
![]()
активное
сопротивление и число витков обмотки
возбуждения;
активное
сопротивление и число витков обмотки
возбуждения;
![]() то же для фиктивной
короткозамкнутой обмотки;
то же для фиктивной
короткозамкнутой обмотки;
![]() полезный магнитный
поток одного полюса;
полезный магнитный
поток одного полюса;
IO – ток намагничивания;
WBiЯ![]()
составляющая,
учитывающая размагничивающее действие
реакции якоря при отсутствии компенсирующей
обмотки;
составляющая,
учитывающая размагничивающее действие
реакции якоря при отсутствии компенсирующей
обмотки;
![]() скорость
идеального холостого хода двигателя.
скорость
идеального холостого хода двигателя.
Обобщенную структурную схему ДПТ НВ целесообразно представить в более универсальном виде, что достигается применением относительных единиц. В табл.3.1 приведены рекомендуемые базовые величины /12/.
Таблица 3.1
|
Переменная величина |
Ф |
IB |
UB |
IBT |
IЯ |
М |
|
E |
|
Базовая величина |
ФН |
IBБ=f(ФН) |
|
|
IЯН |
kФНIЯН (МН) |
|
(UH) |
Базовое значение тока возбуждения IBБ определяется по кривой намагничивания для номинального значения магнитного потока ФН.
Общая математическая модель ДПТ НВ нелинейна (рис.3.6,а).
Нелинейность f1 характеризует зависимость между током и потоком возбуждения. Кроме того, имеют место нелинейности типа перемножения переменных. Для электрических машин малой мощности при работе в зоне малых скоростей существенную роль играет момент трогания МТ.
На структурной модели это выражено в виде нелинейности f2, которую для указанной категории двигателей следует расположить после множительного элемента.
Влияние размагничивающего действия реакции якоря показано на рис.3.6,а пунктирной линией. Формулы для расчета параметров структурной схемы приведены в табл.3.2.
Р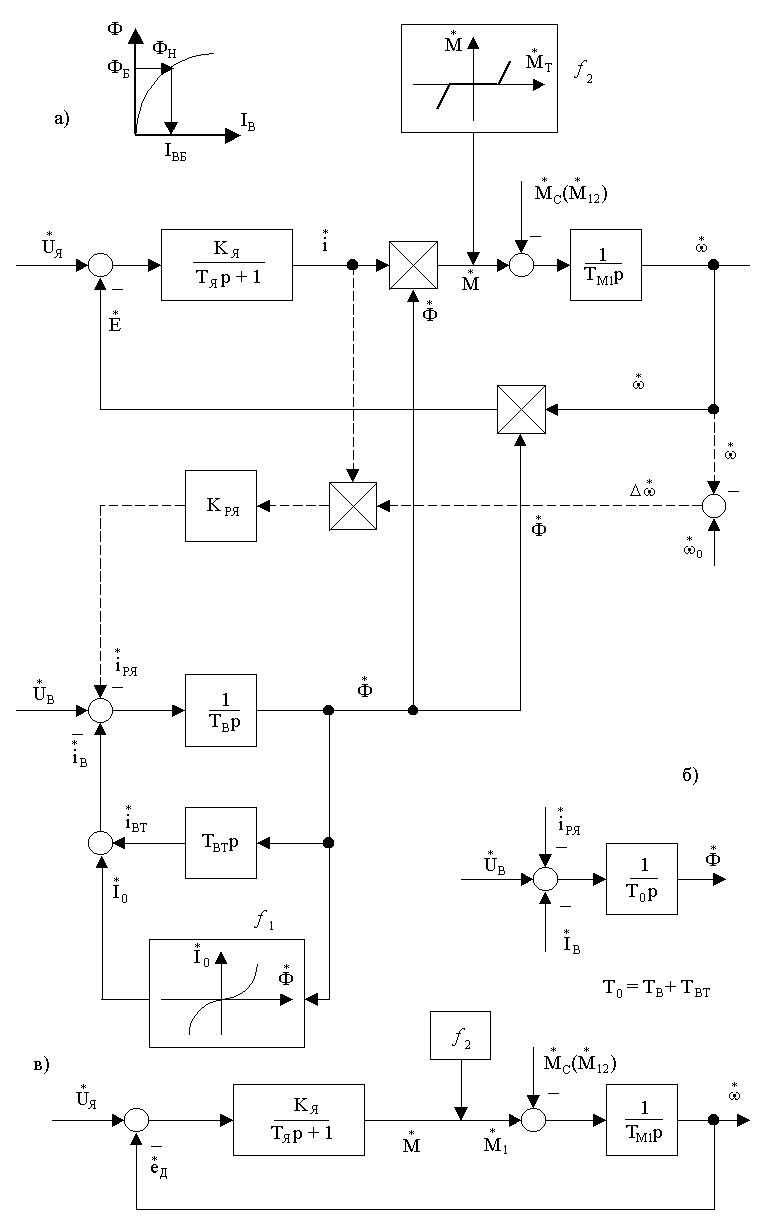 ис.3.6.
Структурная схема двигателя постоянного
тока независимого возбуждения
ис.3.6.
Структурная схема двигателя постоянного
тока независимого возбуждения
Таблица 3.2
|
Параметр |
Обозначение |
Формула |
|
Нормированный коэффициент передачи якорной цепи |
КЯ |
ЕБАЗ/(RЯЦIЯН) |
|
Электромагнитная постоянная времени якорной цепи |
ТЯ |
LЯЦ/RЯЦ
|
|
Механическая постоянная времени двигателя |
ТМ1 |
|
|
Постоянная времени возбуждения |
|
|
|
Базовая постоянная времени вихревых токов |
|
|
|
Нормированный коэффициент передачи реакции якоря |
КРЯ |
|
Нормированный коэффициент передачи якорной цепи
 .
.
Сравним КЯ с коэффициентом передачи двигателя КД
![]()
 .
.
В табл.3.2 следует иметь в виду, что К1=1+(0,5…0,7)(К21), где К2 коэффициент рассеяния потока возбуждения, К2=1,12…1,18; ТВТ=0,2ТВ – для шихтованных ДПТ; КРЯ=0 для компенсированных ДПТ.
В структурной схеме ДПТ НВ целесообразно заменить узел, состоящий из звеньев 1/ТВр и ТВТр согласно рис.3.7, на один эквивалентный (рис.3.8), который после преобразования
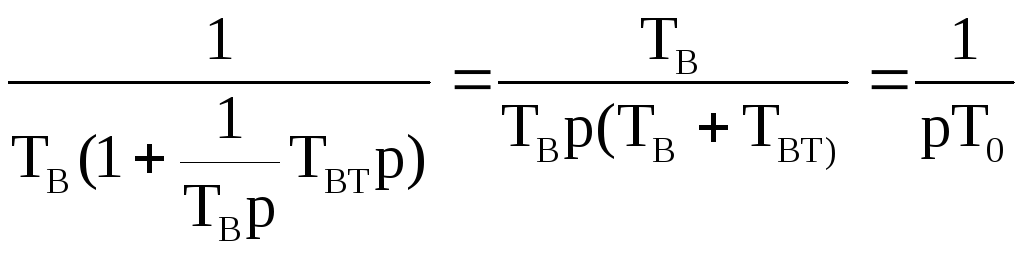 ,
,
представляет интегрирующее звено 1/Т0 р, где Т0=ТВ+ТВТ .
При однозонном
регулировании скорости компенсированного
ДПТ его математическая модель существенно
упрощается (рис.3.6,в). В случае необходимости
учета момента трогания модель дополняется
нелинейностью f2.
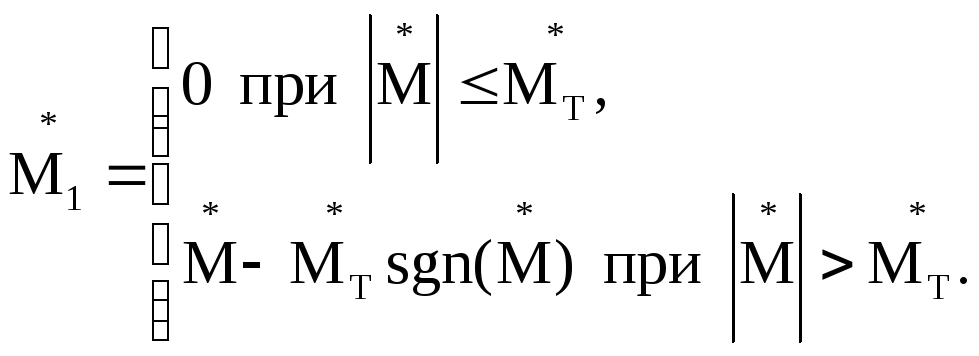
Нелинейная
зависимость
f2
определяет
относительный результирующий момент
двигателя как функцию момента двигателя
![]() и момента трогания
и момента трогания
![]() :
:

В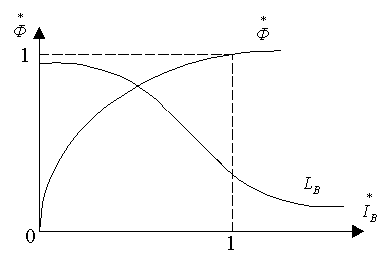 случае двухзонного регулирования
приходится производить линеаризацию
уравнений, описывающих цепь возбуждения
двигателя, переходя к уравнениям в
приращениях от начального режима при
потоке Ф=ФНАЧ,
поскольку индуктивность обмотки
возбуждения LВ
зависит от величины магнитного потока
и связанного с этим состояния магнитной
системы: находится она в насыщенном или
ненасыщенном состоянии (рис.3.9).
Рис.3.9.
Кривая намагничивания и
случае двухзонного регулирования
приходится производить линеаризацию
уравнений, описывающих цепь возбуждения
двигателя, переходя к уравнениям в
приращениях от начального режима при
потоке Ф=ФНАЧ,
поскольку индуктивность обмотки
возбуждения LВ
зависит от величины магнитного потока
и связанного с этим состояния магнитной
системы: находится она в насыщенном или
ненасыщенном состоянии (рис.3.9).
Рис.3.9.
Кривая намагничивания и
индуктивность обмотки возбуждения
![]() ,
(3.7)
,
(3.7)
где
2р
число полюсов машины; WП
– число витков на одном полюсе; ФП
– магнитный поток, пронизывающий полюс,
Вб;
![]() ,
где Ф – полезный поток полюса, проходящий
через якорь;
,
где Ф – полезный поток полюса, проходящий
через якорь;
![]()
коэффициент рассеяния,
коэффициент рассеяния,
![]() .
Тогда индуктивность обмотки возбуждения
после подстановки значения ФП
.
Тогда индуктивность обмотки возбуждения
после подстановки значения ФП![]() рассчитывается
по формуле
рассчитывается
по формуле
![]() , (3.8)
, (3.8)
где
F –
намагничивающая
сила,
![]() ;
;
F=iBWП.
Если перейти к приращениям, то уравнение (3.8) примет следующий вид:
 .
(3.9)
.
(3.9)
Из (3.9) можно записать
![]() ,
,
где ![]() ,
,
![]() приращение
магнитного потока,
приращение
магнитного потока,
![]() приращение
намагничивающей силы,
приращение
намагничивающей силы,
![]()
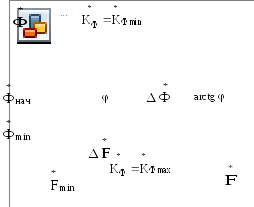 тангенс угла
наклона касательной к характеристике
намагничивания в относительных единицах
в точке
тангенс угла
наклона касательной к характеристике
намагничивания в относительных единицах
в точке
![]() (рис.3.5).
(рис.3.5).
Рис.3.10. Кривая намагничивания машины
В соответствии с этим нелинейный блок f1, представляющий связь между приращениями тока возбуждения, потока и напряжения на обмотке возбуждения, можно записать в виде
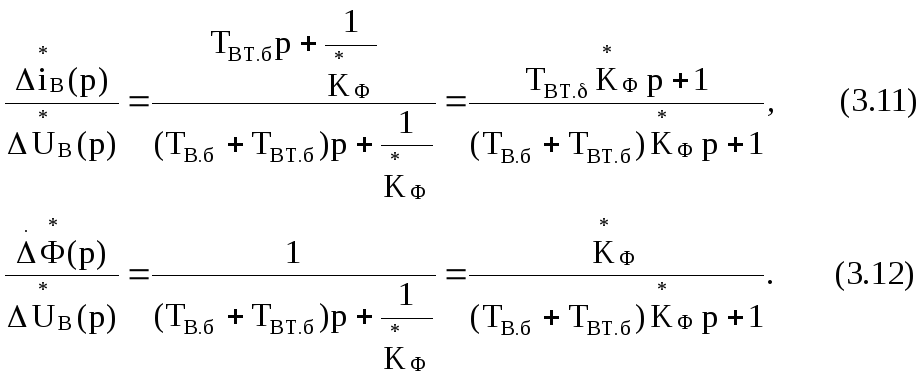
Входящие в формулы
(3.11, 3.12) постоянные времени с учетом для
выражения
![]() (3.10) могут быть представлены в следующем
виде:
(3.10) могут быть представлены в следующем
виде:
![]() ;
;
![]() ,
то есть представляют собой постоянные
времени возбуждения и вихревых токов,
определенные при Ф=Фнач.
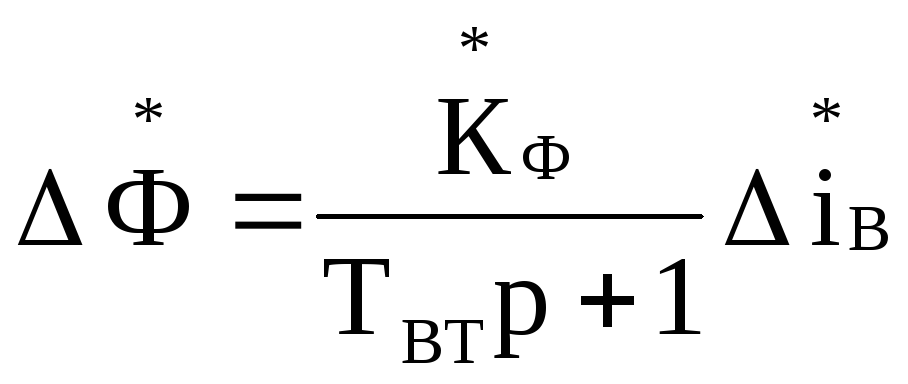
Принимая это во внимание, из уравнений
(3.11, 3.12) получим:
,
то есть представляют собой постоянные
времени возбуждения и вихревых токов,
определенные при Ф=Фнач.
Принимая это во внимание, из уравнений
(3.11, 3.12) получим:
![]() ,
(3.13)
,
(3.13)
 .
(3.14)
.
(3.14)
Постоянную времени
ТВТ
можно определить экспериментальным
путем по осциллограмме приращения тока
в обмотке возбуждения двигателя при
подаче на нее ступенчатого приращения
напряжения возбуждения
![]() .
.
Дальнейшие преобразования связаны с уравнениями электрического равновесия и движения электропривода.
Уравнение электрического равновесия
![]() .
(3.15)
.
(3.15)
Уравнение движения электропривода
![]()
![]() ;
;
![]() ;
;
![]() ,
(3.16)
,
(3.16)
где J – суммарный момент инерции.
После линеаризации уравнений (3.15, 1.16) получим в относительных единицах:
уравнение электрического равновесия
![]() ,
(3.17)
,
(3.17)
уравнение движения электропривода
![]() , (3.18)
, (3.18)
где ТЯЦ,ТМ – электромагнитная и электромеханические постоянные времени:
ТЯЦ=LЯЦ/RЯЦ,
![]() .
.
С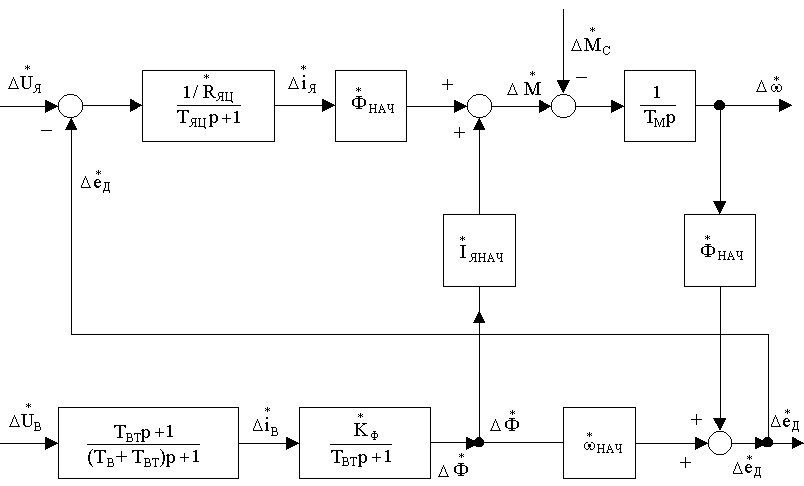 оставленная
на основе уравнений (3.13
3.18) структурная схема двигателя,
управляемая по каналам якоря и обмотки
возбуждения, имеет следующий вид
(рис.3.6).
оставленная
на основе уравнений (3.13
3.18) структурная схема двигателя,
управляемая по каналам якоря и обмотки
возбуждения, имеет следующий вид
(рис.3.6).
Рис.3.6. Линеаризованная структурная схема двигателя постоянного тока независимого возбуждения
Из структурной схемы могут быть получены передаточные функции двигателя, управляемого: 1) по цепи якоря при постоянном потоке (3.19) и 2) управляемого только по цепи возбуждения (3.20):
 , (3.19)
, (3.19)
 ,
(3.20)
,
(3.20)
где ![]() ,
,