

Дискретная пневматика_Осн.Мехатр
.pdfсистемы:
1 → 1 → 2 → 2
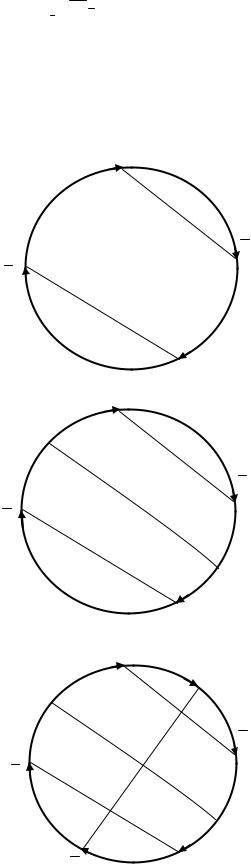
Согласно циклу работы устройств составляем функциональный граф процесса с подграфом связи (рис. 4.1.а). Проанализировав граф, дополняем систему элементами памяти согласно линиям неопределенности (рис. 4.1.б, в). При этом необходимо минимизировать количество элементов памяти, входящих в состав системы. В нашем случае достаточно добавление только одного элемента памяти. При этом последовательность действий с учетом элемента памяти будет следующей:
1 →3 →1 → 2 →3 → 2
Функциональный модуль №3 (элемент памяти).
Исполнительное устройство
Действие основное: запоминание сигнала. Действие возвратное: подготовка к выполнению основного действия. Поскольку данный функциональный модуль не выполняет никакой работы, выбираем в качестве исполнительного устройства 5/2 распределительный клапан с бистабильным пневматическим управлением.
Управление.
Для элемента памяти устройство управления совпадает с исполнительным устройством.
Контроль.
Для элемента памяти выходы распределительного клапана являются одновременно сигналами о переходе клапана в соответствующее состояние, поэтому дополнительные средства контроля не применяем.
Составляем выражения команд для управляющих устройств всех функциональных модулей системы. При этом следует учитывать вариант управления распределительным клапаном (бистабильный или моностабильный). Поскольку в первом функциональном модуле в качестве управляющего устройства применен распределительный клапан с моностабильным управлением, выражения команд составляем по моностабильному варианту. Однако с целью приобретения необходимых навыков, команды для всех управляющих устройств схемы (кроме элементов памяти) следует составлять как для бистабильного, так и для моностабильного вариантов управления.
Бистабильный вариант управления:
Y1 X |
|
X |
|
|
Y1 X3 |
||||||
2 |
3 |
||||||||||
Y2 X1 X 3 |
Y |
|
|
X |
|
|
|||||
2 |
3 |
||||||||||
Y3 X1 |
Y |
|
X 2 |
||||||||
3 |
|||||||||||
Моностабильный вариант: |
|
|
|
|
|
|
|
||||
Y1 X 2 X 3
30
Y2 X 1 X 3
После составления логических уравнений команд управления дополняем комплект оборудования, если это необходимо, устройствами логики (клапаны логического «И» и логического «ИЛИ»). Приступаем к построению схемы и ее сборке непосредственно на стендах (последовательность подключения устройств см. лабораторная работа №1).
1 |
|
|
|
|
а) Функциональный граф с |
||
1 |
подграфом |
связи |
в |
2 |
соответствии |
с исходным |
|
заданием; система из 2 |
|||
|
модулей |
|
|
2
1
|
1 |
б) Функциональный граф с |
||
|
подграфом |
связи |
и |
|
|
|
|||
2 |
|
подграфом |
|
|
|
|
неопределенности |
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
в) Функциональный граф с |
|
|
|
|
1 |
подграфом связи, подграфом |
|
2 |
|
|
|
неопределенности, |
|
|
|
|
дополненный |
одним |
|
|
|
|
|
элементом памяти: |
модуль |
|
|
|
|
№3 |
|
|
|
|
2 |
|
|
3 |
|
|
|||
|
|
|
|||
|
|
|
Рис. 4.1. Построение функционального графа |
|
|
31
2. Многотактные системы второго класса (с многорежимными устройствами).
Практические системы пневмоавтоматики насчитывают, как правило, 2030 исполнительных устройств, выполняющих до 100 операций и действий. Применение в схемах только однорежимных устройств привело бы к тому, что количество исполнительных устройств равнялось бы числу выполняемых операций. Это равносильно удорожанию системы в несколько раз. Поэтому при создании пневмосхем разработчики стремятся минимизировать количество устройств, входящих в состав системы. Одним из способов такой минимизации является работа некоторых функциональных модулей по несколько раз на протяжении одного цикла. Например, в детали требуется просверлить 2 отверстия. Для этого деталь необходимо зафиксировать сначала с одной стороны, затем повернуть и зафиксировать с другой стороны. Операцию фиксации может выполнять один и тот же привод. Такой привод будет многорежимным. Многорежимными называются устройства, которые во время одного цикла работы системы выполняют свои действия несколько раз.
Построение системы с многорежимными устройствами (второй класс).
1. Постановка задачи.
Участок автоматизированной линии. На детали, идущие по конвейеру, наносится маркировка в двух местах: с одной стороны корпуса детали и с другой. Процесс должен быть цикличным. Необходимо подобрать аппаратуру и составить схему работы участка.
Примечание: с двух сторон наносится одинаковая маркировка.
2. Подбор необходимых устройств для разрабатываемой схемы.
Выбор числа функциональных модулей.
Исходя из условия задачи, видим, что в системе присутствуют три основных действия – двукратное нанесение маркировки и перемещение деталей. Изначально можно разбить схему на три функциональных модуля. Однако для уменьшения количества устройств, входящихв состав схемы, маркировку можно наносить с помощью одного многорежимного привода. Поэтому, несмотря на то, что основных действий в системе три, разбиваем схему на два функциональных модуля.
Подбор состава функциональных модулей системы.
Функциональный модуль №1 (многорежимный)
Исполнительное устройство.
Действие основное: нанесение маркировки на корпус детали с помощью штампа. Действие возвратное: возврат штампа в исходное (поднятое) положение. Поскольку привод выполняет работу как при основном действии (операция штамповки), так и при возвратном (подъем штампа), выбираем в качестве исполнительного устройства пневматический цилиндр двухстороннего действия. Исходное положение пневмоцилиндра – шток втянут (штамп поднят).
Управление.
Для управления цилиндром двухстороннего действия выбираем 5/2 распределительный клапан с пневматическим управлением. Поскольку для штампа необходимо соблюдать требования повышенной безопасности
32

(удержание штампа в верхнем положении даже при внезапном исчезновении сигнала управления), применяем моностабильное управление.
Контроль.
Основное действие – штамповка, следовательно, необходимо контролировать усилие, развиваемое приводом в выдвинутом положении штока. Применяем для контроля усилия реле давления, а выдвинутое положение фиксируем с помощью 3/2 моностабильного клапана с механическим управлением (ролик).
Возвратное действие – подъем штампа в исходное положение, следовательно, необходимо контролировать втянутое положение штока. Для этого применим датчик контроля положения (3/2 моностабильный распределительный клапан с механическим управлением).
Функциональный модуль №2.
Исполнительное устройство.
Действие основное: перемещение детали во вторую рабочую позицию. Действие возвратное: подготовка к перемещению следующей детали. Поскольку привод выполняет работу только при основном действии, выбираем пневматический цилиндр одностороннего действия с возвратной пружиной. Исходное положение: шток пневмоцилиндра втянут.
Управление.
Для управления цилиндром одностороннего действия выбираем 3/2 распределительный клапан с пневматическим управлением. Поскольку при работе модуля нет каких-либо дополнительных условий (например, удержание при отсутствии сигнала управления), применяем бистабильное управление.
Контроль.
Основное действие – перемещение детали, следовательно, необходимо контролировать выдвинутое положение штока цилиндра. Применяем для контроля положения 3/2 моностабильный распределительный клапан с механическим управлением (ролик).
Возвратное действие – возврат привода в исходное положение, следовательно, необходимо контролировать втянутое положение штока. Применяем для контроля положения 3/2 моностабильный клапан с механическим управлением (ролик). Если невозможно установить клапан для контроля втянутого положения, применяем контроль по времени. Определяем время, необходимое приводу для возврата. С помощью реле времени подаем сигнал о завершении втягивания штока через указанный промежуток времени.
Начало работы системы.
Устройства начинают свою работу по команде от кнопки «Старт». В качестве пусковой кнопки применим 3/2 распределительный клапан с ручным управлением и фиксацией положения для выполнения условия цикличности действий системы.
3.Построение структуры процесса.
Всистеме присутствуют 2 функциональных модуля (2 исполнительных
устройства). Работу первого устройства исполнительного обозначим как 1 −1 (1
– выдвижение штока, 1 – возврат в исходное положение) и второго
33
исполнительного устройства, соответственно, 2 −2 . Исходя из требуемой последовательности действий устройств, составим логическую цепочку работы системы:
1 → 1 → 2 → 1 → 1 → 2
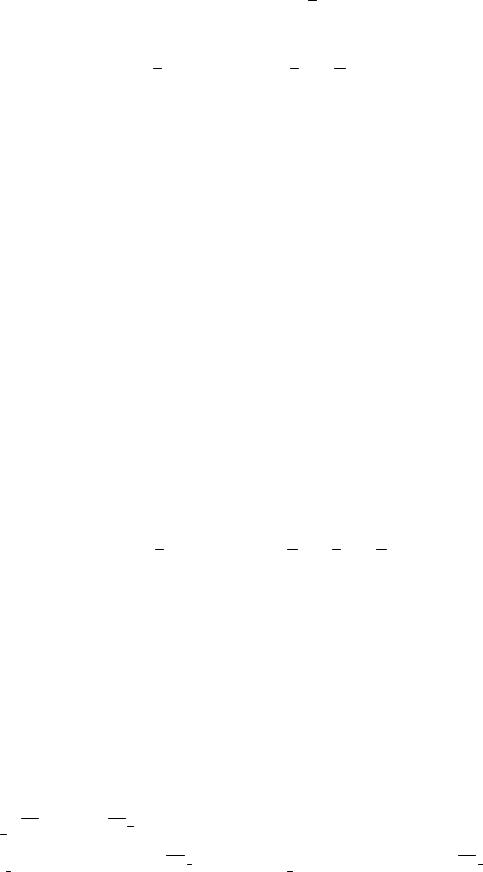
Согласно циклу работы устройств составляем функциональный граф процесса (рис. 4.2.а). Наносим на граф подграф неопределенности (если это необходимо) и дополняем систему элементами памяти в соответствии с линиями неопределенности (рис. 4.2.б, в). Для нормальной работы системы достаточно добавление одного элемента памяти.
Функциональный модуль №3 (элемент памяти).
Исполнительное устройство
Действие основное: запоминание сигнала. Действие возвратное: подготовка к выполнению основного действия. Поскольку данный функциональный модуль не выполняет никакой работы, выбираем в качестве исполнительного устройства 5/2 распределительный клапан с бистабильным пневматическим управлением.
Управление.
Для элемента памяти устройство управления совпадает с исполнительным устройством.
Контроль.
Для элемента памяти выходы распределительного клапана являются одновременно сигналами о переходе клапана в соответствующее состояние, поэтому дополнительные средства контроля не применяем.
После добавления в систему дополнительного функционального модуля последовательность работы устройств будет выглядеть следующим образом:
1 → 3 → 1 → 2 → 1 → 3 → 1 → 2
Составляем выражения команд для управляющих устройств всех функциональных модулей системы. При этом следует учитывать вариант управления распределительным клапаном (бистабильный или моностабильный).
Бистабильное управление:
Y1 X |
|
|
|
+ X 2 |
Y |
|
|
|
|
|
X 3 + X |
|
|
|
||||
2 |
1 |
3 |
||||||||||||||||
Y2 X |
|
X 3 |
Y |
|
|
|
X |
|
X |
|
|
|||||||
1 |
2 |
1 |
3 |
|||||||||||||||
Y3 X 1 X |
|
Y |
|
X 1 X 2 |
||||||||||||||
2 |
3 |
|||||||||||||||||
Моностабильное управление:
Y1 X 2 X 3 + X 2 X 3
Y2 X 1 X 3 + X 2 X 3 + X 1 X 2 X 1 X 3 + X 2 ( X 3 + X 1 )
В соответствии с выражениями управляющих команд приступаем к построению схемы и ее сборке непосредственно на стендах.
34

1
2 |
а) Функциональный граф с |
|
подграфом связи в соответствии с |
|
1 |
исходным заданием; система из 2 |
|
|
|
|
|
модулей |
1 |
2 |
|
|
|
1
1
2
б) Функциональный граф с
1подграфом связи и подграфом неопределенности
1
2
1
1
3 |
|
|
2 |
в) Функциональный граф с |
|
1 |
подграфом связи, |
подграфом |
|
неопределенности, |
дополненный |
|
одним элементом памяти: модуль |
|
№3 |
1 |
2 |
|
|
|
3 |
|
1 |
Рис. 4.2. Построение функционального графа для системы с многорежимным устройством
35
Многотактные системы третьего класса (одновременное выполнение нескольких действий).
Для сокращения времени сборки изделий, а соответственно, увеличения производительности, отдельные операции можно выполнять одновременно. Системы с применением одновременно работающих устройств называются асинхронными. Сразу возникает вопрос, почему же одновременное действие в этом случае не будет синхронным? Во-первых, несколько модулей, получивших одновременно управляющую команду, выполняют разные технологические функции, и длительность их выполнения определяется технологией, а не одновременной подачей команд. Во-вторых, даже для одинаковых функций, например, подача комплектующих на сборочную позицию, время их выполнения будет зависеть от веса детали, состояния оборудования, давления в линиях системы, длины соединительных шлангов и многих других факторов.
Построение асинхронной системы.
1. Постановка задачи.
Участок автоматизированной линии. После подачи в рабочую зону корпусной детали, в нее необходимо запрессовывать с двух сторон заглушки. После установки заглушек, рабочий процесс должен повторится для следующей детали. Необходимо подобрать аппаратуру и составить схему работы участка.
2. Подбор необходимых устройств для разрабатываемой схемы.
Выбор числа функциональных модулей.
Система выполняет 2 основных действия – подача корпуса изготавливаемой детали и запрессовка заглушек. Запрессовку заглушек можно выполнять одновременно с помощью двух приводов. Подачу детали в рабочую зону осуществляем с помощью третьего привода. Исходя из этого, разбиваем систему на 3 функциональных модуля.
Подбор состава функциональных модулей системы.
Функциональный модуль №1
Исполнительное устройство.
Действие основное: подача детали в рабочую зону. Действие возвратное: подготовка к подаче следующей детали (возврат в исходное положение). Поскольку привод выполняет работу только при основном действии, выбираем пневматический цилиндр одностороннего действия с возвратной пружиной. Исходное положение: шток пневмоцилиндра втянут.
Управление.
Для управления цилиндром одностороннего действия выбираем 3/2 распределительный клапан с пневматическим управлением. Поскольку при работе модуля нет каких-либо дополнительных условий, применяем бистабильное управление.
Контроль.
Основное действие – перемещение детали, следовательно, необходимо контролировать выдвинутое положение штока цилиндра. Применяем для контроля положения 3/2 моностабильный распределительный клапан с
36

механическим управлением.
Возвратное действие – возврат привода в исходное положение, следовательно, необходимо контролировать втянутое положение штока. Применяем для контроля положения 3/2 моностабильный клапан с механическим управлением.
Функциональные модули №2 и №3
Исполнительное устройство.
Действие основное: запрессовка в корпус детали заглушки. Действие возвратное: возврат привода в исходное положение (подготовка к запрессовке в следующей детали). Поскольку привод выполняет работу только при основном действии, выбираем пневматический цилиндр одностороннего действия с возвратной пружиной. Исходное положение: шток пневмоцилиндра втянут. Для того, чтобы заглушки не ударялись о корпус детали, поставим дроссель, регулирующий скорость выдвижения штока цилиндра.
Управление.
Для управления цилиндром одностороннего действия выбираем 3/2 распределительный клапан с пневматическим управлением. Поскольку при работе модуля нет каких-либо дополнительных условий, применяем бистабильное управление.
Контроль.
Основное действие – запрессовка заглушки, следовательно, необходимо контролировать усилие, развиваемое приводом в выдвинутом положении штока. Применяем для контроля усилия реле давления, а выдвинутое положение фиксируем с помощью 3/2 моностабильного клапана с механическим управлением.
Возвратное действие – возвращение привода в исходное положение, следовательно, необходимо контролировать втянутое положение штока. Для этого применим датчик контроля положения (3/2 моностабильный распределительный клапан с механическим управлением).
Начало работы системы.
Работа начинается по сигналу от стартовой кнопки. При этом важным условием является многократность работы системы. Поэтому выбираем в качестве кнопки «Пуск» 3/2 распределительный клапан с ручным управлением и фиксацией положения.
3. Построение структуры процесса.
Составляем логическую цепочку последовательности действий исполнительных устройств всех функциональных модулей:
1 → 2,3 → 1,2,3
где 1 −1; 2 −2; 3 −3 – работа исполнительных устройств соответствующих функциональных модулей
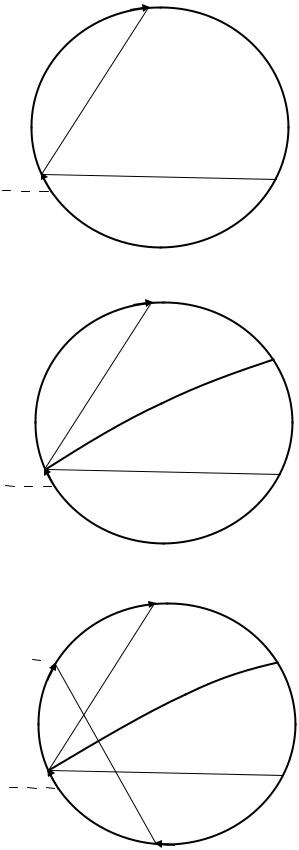
Согласно циклу работы устройств составляем функциональный граф процесса (рис. 4.2.а). Проанализировав функциональный граф, дополняем систему элементами памяти согласно линиям неопределенности (рис. 4.2.б, в). В данной системе достаточно добавление только одного элемента памяти (ФМ
37

№4).
Корректируем последовательность выполняемых действий в схеме с учетом работы элемента памяти:
1 → 2,3 → 4 →1,2,3 → 4
Функциональный модуль №4 (элемент памяти).
Исполнительное устройство
Действие основное: запоминание сигнала. Действие возвратное: подготовка к выполнению основного действия. Поскольку данный функциональный модуль не выполняет никакой работы, выбираем в качестве исполнительного устройства 4/2 распределительный клапан с бистабильным пневматическим управлением.
Управление.
Для элемента памяти устройство управления совпадает с исполнительным устройством.
Контроль.
Для элемента памяти выходы распределительного клапана являются одновременно сигналами о переходе клапана в соответствующее состояние, поэтому дополнительные средства контроля не применяем.
Составляем выражения команд, учитывая тип управляющего устройства (моностабильный или бистабильный).
Бистабильное управление:
Y1 X |
|
|
|
|
Y |
|
|
|
|
X 4 |
|||||||||
4 |
1 |
||||||||||||||||||
Y2 =Y3 X 1 X |
|
|
Y |
|
|
|
=Y |
|
X 4 |
||||||||||
4 |
|
2 |
3 |
||||||||||||||||
Y4 X 2 X 3 |
Y |
|
X |
|
X |
|
X |
|
|
||||||||||
4 |
1 |
2 |
3 |
||||||||||||||||
Моностабильное управление:
Y1 X 4 + X 1 X 4
Y2 =Y3 X 1 X 4
Согласно выражениям команд составляем схему и подключаем все устройства, входящие в ее состав (последовательность подключения устройств см. лабораторная работа №1).
38
1
а) Функциональный граф с подграфом связи в соответствии с исходным заданием; система из 2 модулей
 2, 3
2, 3
1, 2, 3
1
б) Функциональный граф с подграфом связи и подграфом неопределенности
 2, 3
2, 3
1, 2, 3
|
1 |
|
|
|
4 |
в) Функциональный |
граф с |
||
|
подграфом |
связи, |
|
подграфом |
|
неопределенности, |
дополненный |
||
одним элементом памяти: модуль
№3
 2, 3
2, 3
1, 2, 3
4
Рис. 4.3. Построение функционального графа для асинхронной системы
39