

suep_metod_sem2 / suep_metod_sem2 / 6 - СУЭП на основе СД
.pdfРаздел 6. СУЭП на основе CД
6.0. Особенности СД как объекта управления
По сравнению с асинхронным двигателем СД как объект управления имеет характерные особенности:
•электрическая частота вращения ротора R совпадает с частотой магнитного поля ротора, т.е. скольжение отсутствует;
•магнитное поле ротора создается обмоткой возбуждения, как в ДПТ с независимым возбуждением (или же постоянными магнитами, расположенными на роторе);
•СД с электромагнитным возбуждением может работать как с единичным коэффициентом мощности, так и с опережающим или отстающим cos , в зависимости от величины тока возбуждения (при возбуждении от постоянных магнитов при изготовлении СД можно установить априори значение желаемого cos );
•в отличие от АД, регулирование частоты вращения СД обязательно связано с изменением частоты питающего напряжения, поэтому развитие регулируемого синхронного ЭП началось, по существу, с появлением тиристорных ПЧ.
Ротор СД может выполняться как
•явнополюсный – полюса ротора четко выражены, обычно тихоходные СД;
•неявнополюсный - обмотка возбуждения укладывается в пазы ротора, как в АД с фазным ротором, обычно это СД со скоростями 1500 и 3000 об/мин.
В установках средней и большой мощности применяют системы регулируемого привода на основе традиционного синхронного двигателя с трехфазной обмоткой на статоре и однофазной на роторе. В приводах малой и весьма малой мощности применяют СД с возбуждением от постоянных магнитов.

Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Обобщенное математическое описание СД
Схема питания обмоток трехфазного явнополюсного СД
Обычно на роторе расположена одна обмотка возбуждения (по продольной оси).
В нерегулируемых приводах применяют СД с дополнительной поперечной обмоткой возбуждения (компенсация реакции статора), а также с короткозамкнутой демпферной (пусковой) обмоткой (для повышения динамической устойчивости).
В СД, предназначенном для работы в составе частотно-регулируемого привода дополнительные обмотки, как правило, не используют.
За счет наличия в роторе источника энергии в установившемся режиме ротор будет вращаться синхронно с магнитным полем в воздушном в зазоре.
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Обобщенное математическое описание СД
При рассмотрении процессов в СД принимают допущения, аналогичные тем, которые принимались для АД.
•обмотка статора является симметричной, в роторе расположена одна обмотка возбуждения по продольной оси;
•напряжения и токи статора являются синусоидальными, питание ротора выполняется от идеального источника постоянного напряжения;
•не учитывается насыщение магнитной цепи;
•потерями в стали статора и ротора можно пренебречь;
•параметры обмоток сосредоточенные и не зависят от режима работы СД.
Для математического описания СД также используют понятие обобщенного вектора и аппарат комплексных чисел.
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Обобщенное математическое описание СД
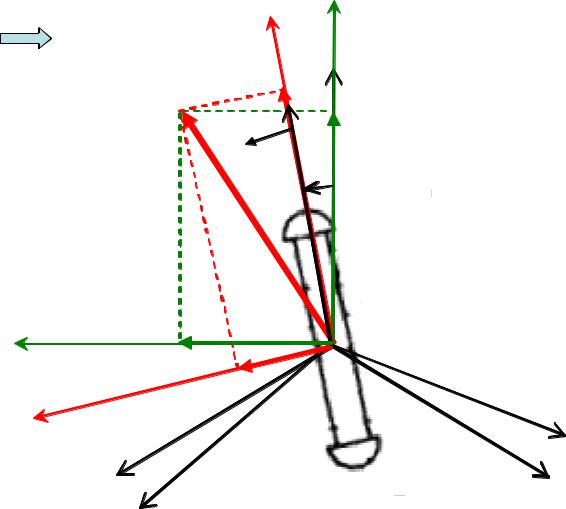
В силу несимметрии (как магнитной, так и электрической) ротора уравнения с постоянными коэффициентами могут быть получены при рассмотрении процессов в СД в системе координат d, q, жестко связанной с ротором.
Продольную ось d совмещают по |
|
|
|
|
направлению магнитного потока, |
|
d |
|
|
|
|
|
||
создаваемого обмоткой возбуждения. |
IS |
iSd a |
A |
|
Видимое взаимное расположение статора |
||||
и ротора характеризуется угловым |
|
R |
|
i |
положением ротора , измеряемым в |
|
|
R |
S |
геометрических (обычных) радианах или градусах, зависящим от текущей частоты вращения вала двигателя .
В то же время магнитное поле ротора вращается относительно
неподвижного статора с частотой
R zp
измеряемой в электрических
радианах (или градусах) в секунду.
O
iS |
iSq |
|
|
c |
q
B
b |
C |
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Обобщенное математическое описание СД
Уравнения электрического равновесия статора:
u |
d |
R i |
d |
d d |
q |
(1) |
|||
|
S |
dt |
R |
|
|||||
|
|
|
|
|
|
|
|
|
|
u |
q |
R i |
q |
d q |
d |
(2) |
|||
|
|
S |
|
dt |
R |
|
|||
|
|
|
|
|
|
|
|
|
|
Уравнение электрического равновесия обмотки возбуждения на роторе как цепи постоянного тока (по продольной оси):
|
|
|
|
u f |
Rf i f |
d f |
(3) |
|
|
dt |
|
Уравнение потокосцепления обмотки возбуждения (по продольной оси)
f Lf i f |
3 M f id |
(4) |
|
2 |
|
где Lf – собственная индуктивность обмотки возбуждения;
M f – максимальное значение взаимной индукции между обмоткой возбуждения и фазой статора.
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Обобщенное математическое описание СД
Уравнения для составляющих потокосцепления статора:
где Ld
Lq
d Ld id M f i f |
(5) |
||
|
|
|
|
|
|
|
|
|
q Lqiq |
|
(6) |
|
|
|
|
–индуктивность статора по продольной оси;
–индуктивность статора по поперечной оси.
Электромагнитный момент СД выражается аналогично АД
|
|
|
3 z p d iq qid |
|
M |
3 z p Im S*IS |
(7) |
||
|
2 |
|
2 |
|
Вышеприведенные уравнения представляют собой полное математическое описание электромагнитных контуров СД в системе координат ротора с учетом принятых допущений. Оно громоздко, и в таком виде непригодно для задач синтеза управления.
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Математическое описание СД для задач управления
Учитывая, что основными регулируемыми электрическими координатами являются токи id, iq, if, выполним преобразование уравнений (1) – (3) путем подстановки в них выражений для потокосцеплений (4) – (6):
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
diq |
|
|
ud RSid Ld |
did |
M f |
dif |
R q |
|
|
(8) |
|
|
uq RS iq Lq |
R d |
||||||||
dt |
dt |
|
|
|
|
|
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
R |
|
i |
|
L |
di f |
|
3 |
M |
|
did |
(10) |
|
|
||
|
|
f |
f |
f |
f dt |
2 |
f |
dt |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Из (10) выражаем производную тока возбуждения и подставляем в (8):
|
|
|
ud |
RS id Ld |
did |
k f u f k f Rf i f |
R Lqiq |
|
|
(11) |
|||||
|
|
|
dt |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
Ld |
Ld |
3M 2f |
; |
k f |
|
M f |
Для неявнополюсной машины характерно |
|||||||
2Lf |
|
Lf |
|
|
|
|
Ld |
Lq |
|||||||
|
|
|
|
|
|
|
|
для явнополюсной – |
|||||||
Дополняя (3) – (9), (11) уравнением движения |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
M MC J d |
|
(12) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
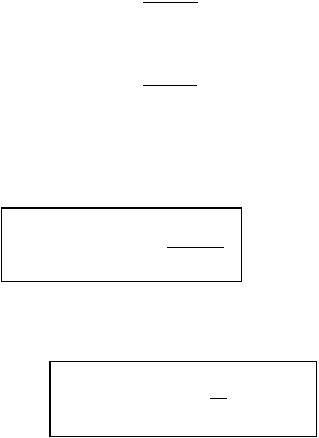
(9)
Ld Lq
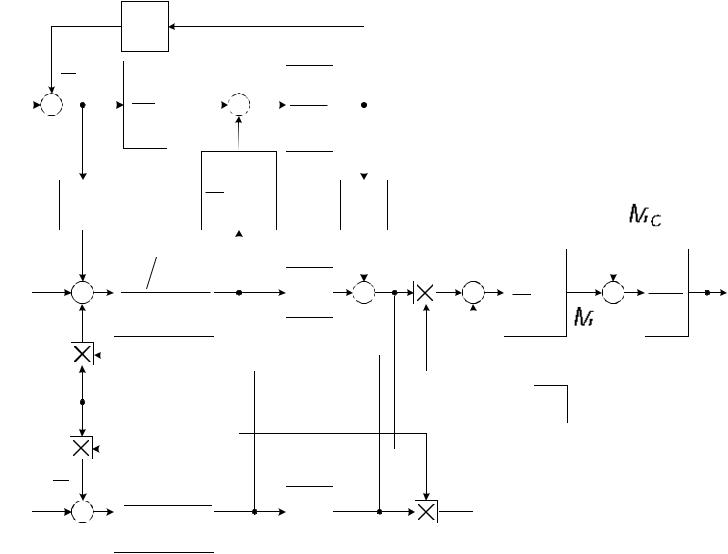
можно изобразить структурную схему СД
Раздел 6. СУЭП на основе CД
6.1. Традиционный синхронный двигатель как объект управления
Математическое описание СД для задач управления
|
|
|
|
|
|
|
|
|
|
|
Структурная схема |
|
Rf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
традиционного |
||
|
|
|
|
|
|
|
|
|
|
|
трехфазного СД |
u f |
1 f |
|
|
|
|
|
|
|
|||
|
|
1 |
if |
|
|
|
как объекта управления |
||||
|
p |
|
|
Lf |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
k f |
|
|
3 M f |
|
|
M f |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
ud |
1 RS |
id |
|
Ld |
d |
3 |
z |
|
1 |
||
|
|
p |
|||||||||
|
Td p 1 |
|
|
|
2 |
Jp |
|||||
uq |
|
|
|
iq |
|
q |
|
|
|
|
|
|
|||
|
|
1 RS |
|
|
|||
|
Lq |
|
|||||
|
|
|
|||||
|
|
|
Tq p 1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R zp
Td Ld  RS
RS
Tq Lq  RS
RS
– электромагнитные постоянные времени СД по продольной и поперечной осям.

Раздел 6. СУЭП на основе CД
6.2. Основные принципы формирования управляющих воздействий в СУЭП на основе традиционного СД
Требования оптимального использования габаритной мощности СД (и установленной мощности ПЧ) приводят к необходимости выполнения условий:
1.Обеспечение работы СД с номинальным потокосцеплением во всем диапазоне изменения нагрузок и регулирования скорости , т.е. должно
выполняться условие: S = S.H = const (за исключением режима ослабления поля при двухзонном регулировании).
2.Обеспечение работы СД с коэффициентом мощности, равным или близким к единице.
Соблюдение первого из названных условий ( S=Const) позволяет приравнять нулю производные потокосцепления статора в уравнениях (1), (2). Кроме того, для упрощения будем считать, что RS 0. Тогда уравнения (1), (2) приобретают вид:
u |
d |
|
; |
|
|
R |
q |
(13) |
|
u |
|
|
|
|
q |
|
|
||
|
R d |
|
|
Реактивная мощность, потребляемая СД из сети, вычисляется по формуле:
QS |
3 ImUS IS* |
3 |
uqid ud iq |
(14) |
|
2 |
2 |
|
|
Раздел 6. СУЭП на основе CД
6.2. Основные принципы формирования управляющих воздействий в СУЭП на основе традиционного СД
Соблюдение второго условия требует, чтобы QS 0
После подстановки выражений (13) в (14) можно получить условие:
|
i |
f |
|
|
|
d |
|
S |
i |
I f |
|
q |
|||
|
|
||
iq |
|
|
IS
 id
id
Re S*IS d id qiq 0 |
(15) |
Это условие, при котором реактивная мощность статором СД не потребляется.
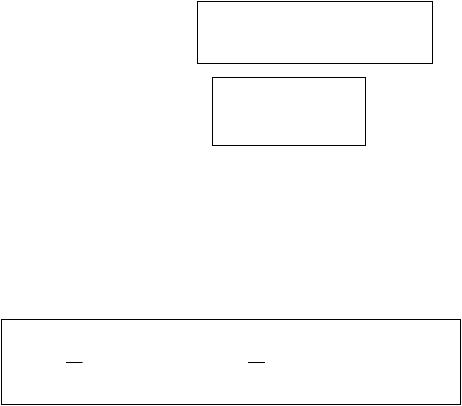
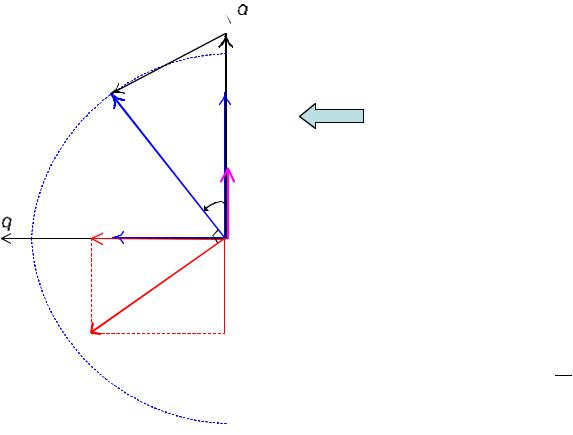
Векторная диаграмма СД при выполнении условий (13), (15)
Ввиду условия (15) вектор потокосцепления статора всегда ортогонален вектору тока статора и скользит по окружности.
Момент двигателя может быть выражен следующим образом:
|
3 |
(16) |
|
M |
2 z p S.H IS |
||
|