

4 Лабораторная работа № 8.1 Исследование одноконтурной системы регулирования скорости трн-ад
Цель работы: изучение статических и динамических свойств замкнутой одноконтурной системы регулирования скорости асинхронного двигателя с тиристорным регулятором напряжения в цепи статора.
Работа выполняется на стенде №8.
При подготовке и защите отчета студенты должны ответить на контрольные вопросы, которые состоят из двух блоков:
1. Блок вопросов, относящихся к методике работы на стенде для исследуемой системы.
2. Блок вопросов, относящихся к обработке экспериментальных данных.
К работе допускаются студенты, правильно ответившие на первый блок вопросов – 1 – 12. На второй блок вопросов – 13 – 20 – студент должен ответить при защите лабораторной работы.
4.1 Основные теоретические положения
Для анализа работы системы ТРН – АД рассмотрим, прежде всего, упрощенную Т-образную схему замещения (рис.4.1).
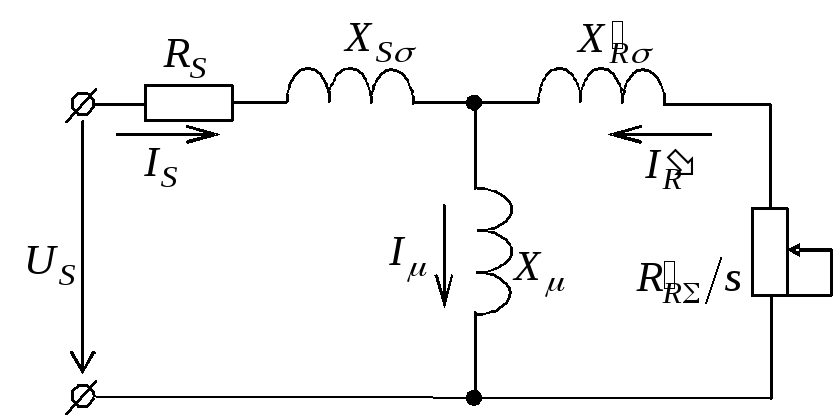
Рисунок 4.1 – Т-образная схема замещения асинхронного двигателя
Уравнения электрического равновесия, записанные для комплексов фазных значений электрических величин, имеют вид:
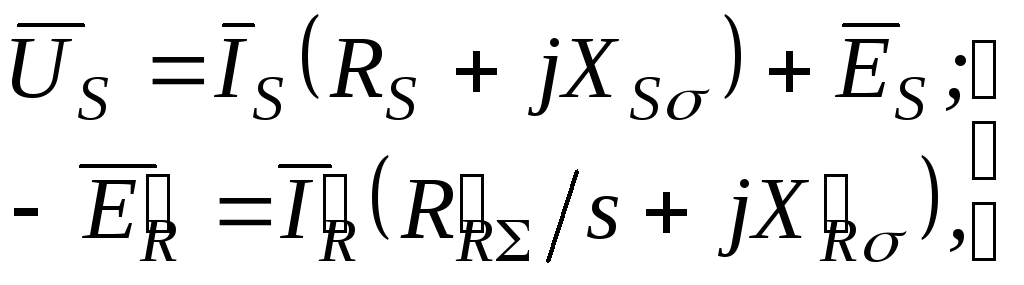 (4.1)
(4.1)
где
![]() .
.
В пределах рабочего
участка механической характеристики,
когда ток статора существенно не
превышает номинальное значение,
произведением
![]() можно пренебречь ввиду его относительной
малости. При этом с известным приближением
можно записать:
можно пренебречь ввиду его относительной
малости. При этом с известным приближением
можно записать:
![]() , (4.2)
, (4.2)
где
![]() – частота питающей сети, Гц;
– частота питающей сети, Гц;![]() – число витков статорной обмотки;
– число витков статорной обмотки;
![]() –магнитный поток,
Вб.
–магнитный поток,
Вб.
Из уравнения (4.2)
следует, что при неизменной частоте
![]() изменения напряжения приводят к
соответствующим изменениям магнитного
потока двигателя. Снижение напряжения
вызывает в соответствии с (4.2) уменьшение
магнитного потока, поэтому напряжение,
приложенное к обмоткам статора
асинхронного двигателя при
изменения напряжения приводят к
соответствующим изменениям магнитного
потока двигателя. Снижение напряжения
вызывает в соответствии с (4.2) уменьшение
магнитного потока, поэтому напряжение,
приложенное к обмоткам статора
асинхронного двигателя при![]() может рассматриваться как управляющее
воздействие, определяющее поток
двигателя, аналогично напряжению,
приложенному к обмотке возбуждения
двигателя постоянного тока.
может рассматриваться как управляющее
воздействие, определяющее поток
двигателя, аналогично напряжению,
приложенному к обмотке возбуждения
двигателя постоянного тока.
Форма механических
характеристик асинхронного двигателя
при
![]() и
и![]() в разомкнутой системе показаны на
рис.4.2. Она определяется известными
соотношениями:
в разомкнутой системе показаны на
рис.4.2. Она определяется известными
соотношениями:
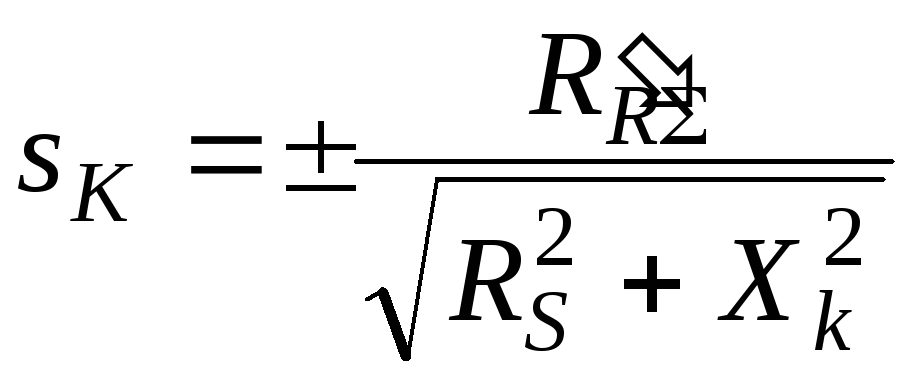 ; (4.3)
; (4.3)
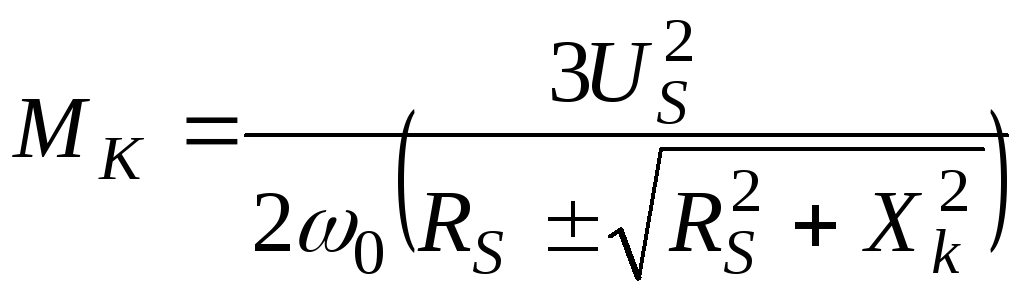 . (4.4)
. (4.4)
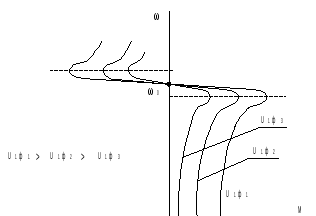
Рисунок 4.2 – Механические характеристики асинхронного двигателя
при
![]()
Форма механических характеристик наглядно свидетельствует о том, что для получения жестких механических характеристик необходимо плавное регулирование напряжения для поддержания заданных значений скорости с помощью отрицательной обратной связи по скорости. Такое регулирование может быть осуществлено с помощью тиристорного регулятора напряжения (рис.4.3).
Регулирование скорости двигателя с короткозамкнутым ротором в замкнутой системе хотя принципиально и возможно, однако ограничено в длительном режиме сравнительно небольшим диапазоном при постоянном моменте нагрузки вследствие значительных потерь, выделяющихся в двигателе. Большее практическое значение имеет схема включения асинхронного двигателя с фазным ротором и дополнительными резисторами в роторной цепи.
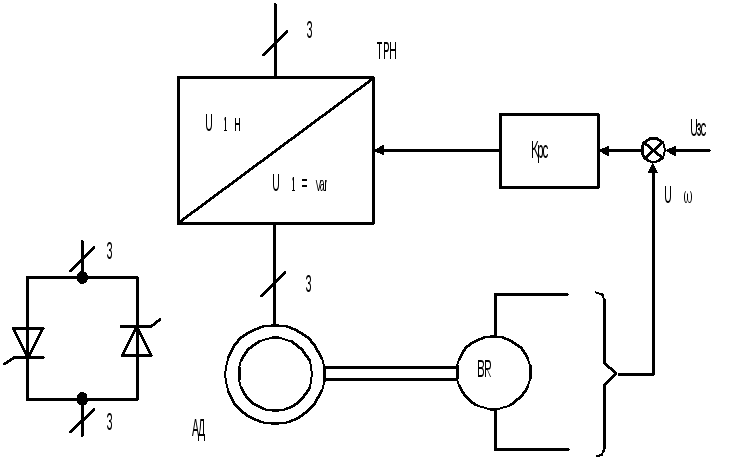
Рисунок 4.3 – Система ТРН-АД
Механические характеристики электропривода в замкнутой системе ТРН-АД имеют вид, показанный на рис.4.4.
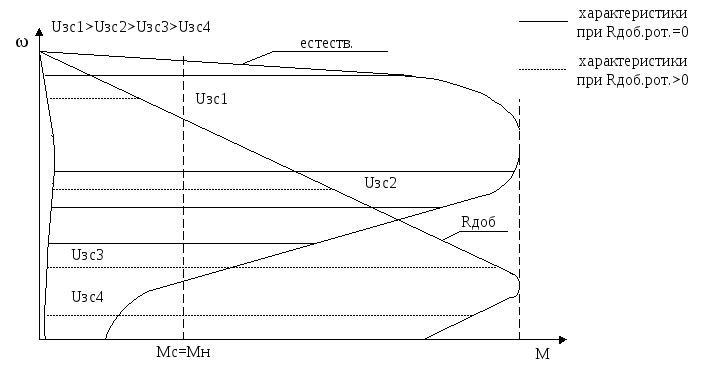
Рисунок 4.4 – Механические характеристики электропривода
в замкнутой системе ТРН-АД
Как видно, для случая RДОБ.РОТ=0 допустимый диапазон изменения статической нагрузки при достаточно большом диапазоне регулирования скорости ограничен (сплошные линии). Для расширения диапазона регулирования скорости и допустимых пределов изменения нагрузки, а также улучшения тепловых режимов двигателя в роторную цепь целесообразно вводить добавочные сопротивления. Характеристики в замкнутой системе для этого случая показаны прерывистыми линиями.
Механическая характеристика двигателя при изменении напряжения питания может быть рассчитана по формуле:
 , (4.5)
, (4.5)
где
![]() – относительное напряжение, подводимое
к статору (определяемое по первой
гармонике).
– относительное напряжение, подводимое
к статору (определяемое по первой
гармонике).
Представление
момента двигателя выражением (4.5)
справедливо в том случае, когда частота
среза
![]() разомкнутого контура скорости, имеющего
типовую ЛАЧХ, выбрана из условия:
разомкнутого контура скорости, имеющего
типовую ЛАЧХ, выбрана из условия:
![]() , (4.6)
, (4.6)
где
![]() – максимальная из электромагнитных
постоянных времени типовых звеньев,
входящих в передаточную функцию АД и
определяющих электромагнитные переходные
процессы в нем.
– максимальная из электромагнитных
постоянных времени типовых звеньев,
входящих в передаточную функцию АД и
определяющих электромагнитные переходные
процессы в нем.
Величина
![]() может быть получена из анализа ЛАЧХ АД,
построенных по дифференциальным
уравнениям, записанным в "малом".
В частности, этот анализ показывает,
что в ЛАЧХ можно выделить три участка:
низкочастотный, на котором характеристики
параллельны оси частот, среднечастотный
– с наклоном, близким к -1, и высокочастотный
– с наклоном -3. Частота сопряжения
первых двух участков определяется
электромеханической постоянной времени
привода, а второго и третьего –
электромагнитной постоянной двигателя,
зависящей от величины коэффициента
затухания ротора при замкнутом статоре:
может быть получена из анализа ЛАЧХ АД,
построенных по дифференциальным
уравнениям, записанным в "малом".
В частности, этот анализ показывает,
что в ЛАЧХ можно выделить три участка:
низкочастотный, на котором характеристики
параллельны оси частот, среднечастотный
– с наклоном, близким к -1, и высокочастотный
– с наклоном -3. Частота сопряжения
первых двух участков определяется
электромеханической постоянной времени
привода, а второго и третьего –
электромагнитной постоянной двигателя,
зависящей от величины коэффициента
затухания ротора при замкнутом статоре:
![]() ,
,
где
![]() – угловая частота напряжения сети;
– угловая частота напряжения сети;
![]() –коэффициент
затухания ротора.
–коэффициент
затухания ротора.
Эта постоянная
времени и является максимальной
электромагнитной постоянной двигателя
![]() .
Учитывая, что
.
Учитывая, что![]() ,
получим:
,
получим:
![]() (4.7)
(4.7)
Чтобы иметь математическое описание двигателя как объекта регулирования, необходимо дополнить выражение (4.5) уравнением движения:
![]() . (4.8)
. (4.8)
Анализ уравнений (4.5) и (4.8), показывает, что АД даже при упрощенном представлении является нелинейным звеном, содержащим в прямом канале квадратичный преобразователь и имеющим внутреннюю нелинейную обратную связь по скорости. Аналитическое исследование системы ТРН-АД возможно в случае линеаризации уравнения двигателя. Линеаризация может быть осуществлена двумя способами – путем анализа малых отклонений от статического состояния и путем технической линеаризации, предусматривающей введение последовательно с нелинейным объектом нелинейного звена, характеристика которого обратна характеристике объекта.
Рассмотрим линеаризацию в области малых отклонений. В результате линеаризации уравнений (4.5) может быть получено выражение для динамического момента электропривода:
 , (4.9)
, (4.9)
где
![]() – модуль жесткости механической
характеристики двигателя в разомкнутой
системе;
– модуль жесткости механической
характеристики двигателя в разомкнутой
системе;![]() – коэффициент передачи по моменту.
– коэффициент передачи по моменту.
С учетом функциональной схемы (рис.4.3) и уравнения (4.9) можно составить структурную схему асинхронного привода для замкнутой системы регулирования (рис.4.5).
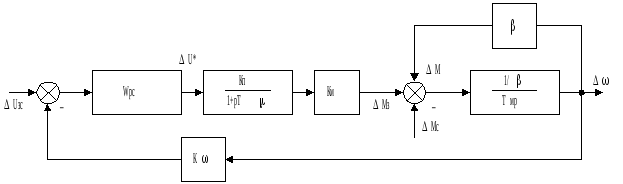
Рисунок 4.5 – Структурная схема асинхронного привода
при замкнутой системе регулирования.
При настройке контура скорости по модульному оптимуму передаточная функция регулятора скорости определяется по формуле:
![]() , (4.10)
, (4.10)
где
![]() – некомпенсируемая постоянная времени,
с.
– некомпенсируемая постоянная времени,
с.
Учитывая ограничение
(4.6), накладываемое на полосу пропускания
контура скорости, и принимая во внимание
выражение (4.7), постоянную времени
![]() необходимо выбрать, исходя из условия:
необходимо выбрать, исходя из условия:
![]() . (4.11)
. (4.11)
Параметры регулятора задаются или рассчитываются по общеизвестным методикам.