

suep_metod_sem2 / suep_metod_sem2 / 5.11 - Векторное управление асинхронным электроприводом
.pdfВекторное управление асинхронным электроприводом
Векторное управление, в отличие от скалярного, предполагает обеспечение закона частотного управления не только в установившихся, но и в переходных режимах работы ЭП. Это позволяет обеспечить высокое качество характеристик ЭП как в статике, так и в динамике.
При векторном управлении моментом и скоростью короткозамкнутого АД (UR 0) наибольшее распространение получил закон управления
R const , |
(1) |
заключающийся в непрерывной текущей стабилизации как модуля R  R
R  ,
,
так и углового положения C Arg R вектора R потокосцепления ротора.
Данный закон позволяет получить наилучшие статические характеристики, и в то же время характеризуется наиболее простым алгоритмом реализации.
Первая промышленная система векторного регулирования скорости асинхронного ЭП была разработана в начале 1970-х годов немецкой фирмой Siemens, и получила название Transvektor.
Для реализации закона управления (1) система регулирования строится в системе координат, традиционно обозначаемой d, q, ориентированной по вектору потокосцепления ротора, когда вещественная ось d системы координат строго совмещается с обобщенным вектором потокосцепления ротора:
Rd R R , Rq 0 . |
(2) |
Математическое описание и структурная схема АД для задач векторного управления
При выводе уравнений АД в системе координат (2), из уравнений Парка –
Горева исключают векторы IR , S |
с помощью уравнений: |
|
||||||||
|
|
1 |
|
k |
|
|
; |
(3) |
||
I |
R |
|
|
R |
I |
S |
||||
|
|
LR |
R |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
S LS IS kR R |
(4) |
|||||||||
В результате после преобразований можно получить уравнения баланса напряжений статора и ротора АД:
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
k |
|
|
|
j |
|
k |
|
|
; |
(5) |
|||||||
L pI |
S |
U |
S |
R I |
S |
C |
L I |
S |
|
R |
|
R |
|
|
|||||||||||||||||
|
|
S |
|
|
|
|
l |
|
S |
|
|
TR |
R |
|
|
|
|
R R |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
k |
|
R |
|
, |
|
(6) |
||||||||
|
|
|
|
|
|
p |
R |
|
1 |
C |
R |
|
R |
R |
R |
I |
S |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
TR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где R R |
S |
k |
2 R |
R |
– эквивалентное активное сопротивление АД; |
|
|||||||||||||||||||||||||
l |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
TR LR |
RR |
|
– постоянная времени роторной цепи АД. |
|
|
|
|
||||||||||||||||||||||||
Разложим (5), (6) на составляющие, подставив в них |
|
|
|
|
|||||||||||||||||||||||||||
US uSd juSq ; |
IS iSd jiSq ; |
R R j0 , |
В результате получим две системы скалярных уравнений:
σL |
S |
pi |
Sd |
u |
Sd |
R i |
Sd |
ω σL i |
Sq |
kR Ψ |
R |
; |
|
||||||||||
|
|
|
|
l |
|
|
C |
S |
|
|
TR |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
σL |
S |
pi |
Sq |
u |
Sq |
R i |
Sq |
|
ω σL i |
Sd |
|
ω |
R |
k Ψ |
|
; |
|||||||
|
|
|
|
l |
|
|
C |
S |
|
|
R |
|
|
R |
|||||||||
|
|
pΨR |
1 |
ΨR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
TR |
kR RRiSd ; |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iSq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωC ωR kR RR |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
ΨR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7)
(8)
Уравнения (7) представляют собой уравнения балансов напряжений электромагнитных контуров АД по осям d и q. Первое уравнение (8) описывает магнитную цепь АД. Второе уравнение (8) представляет собой условие точной ориентации системы координат d ,q по вектору потокосцепления ротора, ко-
торое для обеспечения закона управления (1) должно выполняться постоянно средствами системы автоматического регулирования.
Уравнение электромагнитного момента
M 32 z pkR Im R IS*
после постановки комплексных значений векторов с учетом условия (2) получится в виде:
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
3 z |
|
k Ψ i |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(9) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
p |
|
|
R R |
Sq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Уравнение движения ЭП: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M MC |
|
J d |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где J |
|
– суммарный момент инерции АД и механизма, приведенный к валу АД. |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
kR TR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МС |
|
Уравнениям (7) – (10) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соответствует структурная |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
uSd |
|
|
|
|
iSd |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
1 Rl |
Lm |
|
|
|
|
3 |
zpkR |
|
|
|
|
|
|
|
1 |
схема |
АД |
(рис.4.55). На |
|||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
T p 1 |
|
|
|
|
|
|
T p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схеме |
|
обозначено: |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
М |
|
|
|
|
Jp |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
l |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tl LS Rl |
– эквивалент- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
LS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ная |
постоянная |
времени |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
электромагнитных |
конту- |
|||||
uSq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ров АД. |
|
|
|
||
|
|
|
|
1 R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Очевидно, |
что слож- |
||||||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
T p 1 |
iSq kRRR |
|
|
|
|
|
|
|
|
|
zp |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ность управления АД про- |
|||||||||||||||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
kR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
является в следующем: |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
имеет место нелинейная |
|||||||||||
Рис.4.55. Структурная схема короткозамкнутого |
||||||||||||||||||||||||||||||||||||||||||||
АД в системе координат d, q, ориентированной по |
зависимость |
(9) |
элек- |
|||||||||||||||||||||||||||||||||||||||||
вектору потокосцепления ротора. |
тромагнитного момента |
|
от произведения модуля |
||
|

вектора потокосцепления и составляющей тока статора iSq ;
присутствуют перекрестные обратные связи (ПОС) (на схеме рис.4.55 обозначены пунктиром), обусловливающие взаимное влияние каналов управления друг на друга – соответствующие связи на структурной схеме проведены прерывистыми линиями:
e |
kR |
R |
; |
e |
d |
L |
|
i |
Sd |
; |
e |
q |
L |
i |
Sq |
; e |
k |
|
. (11) |
|
T |
|
|
S |
|
C |
|
|
S |
C |
|
R |
|
R R |
|||||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Предположим, что влияние сигналов ПОС незначительно, и им можно пренебречь. В этом случае можно считать, что стабилизация в системе регулирования составляющей uSd напряжения статора (следовательно, и составляю-
щей тока статора iSd ) ведет к стабилизации модуля вектора потокосцепления ротора R , а изменение составляющей uSq напряжения статора (следовательно, и тока iSq ) при R const позволяет обеспечить соответствующее изменение
электромагнитного момента АД, следовательно, формировать требуемую тахограмму ЭП.
Ввиду указанных закономерностей составляющую тока статора iSd называю намагничивающей или потокообразующей составляющей, а iSq – моменто-
образующей составляющей вектора тока статора.
На основе структурной схемы АД (рис.4.55), рассматриваемой без учета ПОС ed , eq , и e , можно провести аналогию со схемой ДПТ при управлении
по цепям якоря и возбуждения. При этом ток iSd соответствует току цепи возбуждения ДПТ, а ток iSq – току цепи якоря.
Таким образом, если формировать напряжения статора в системе координат d, q, которая точно ориентируется по вектору потокосцепления ротора, то принцип построения системы управления становится аналогичным принципу организации системы двухзонного регулирования скорости ДПТ с раздельным управлением магнитным потоком и напряжением на якоре. Этот принцип лежит в большинстве современных систем векторного управления асинхронным электроприводом, и также используется при векторном управлении электроприводами на основе двигателей других типов (синхронных, вентильных).
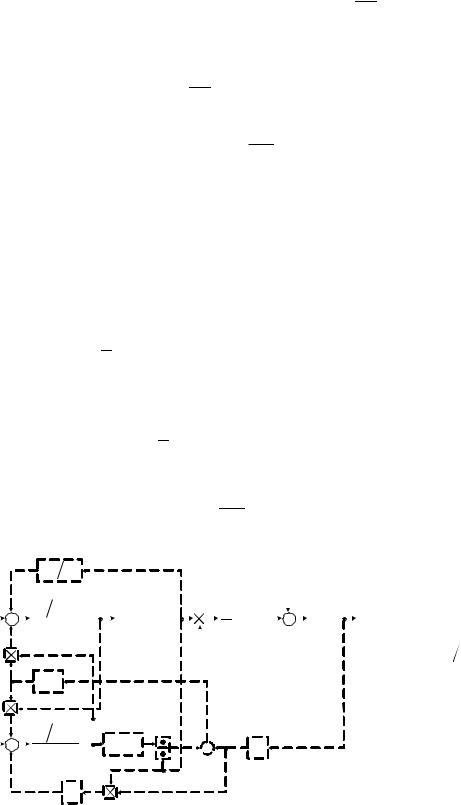
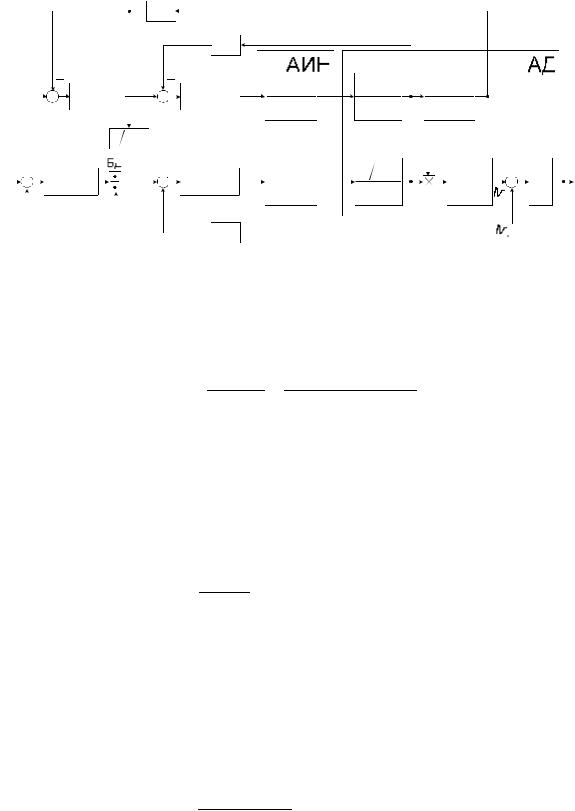
Функциональная схема системы векторного управления АД (трансвектор)
Функциональная схема системы Transvektor представлена на рис.4.56. Силовая часть системы содержит ПЧ на основе автономного инвертора
напряжения с ШИМ и короткозамкнутый АД.
В системе предусматривается непосредственное измерение фазных токов статора в двух фазах (датчики тока ДТА и ДТС), скорости (тахогенератор MG) и составляющих m и m главного магнитного потокосцепления т.
R
RЗ |
iSd.З |
|
|
|
|
|
|
R |
|
|
uyd |
|
|
uy |
|
|
|
|
|
||||
UЗ |
MЗ iSq.З |
|
uyq |
|
|
|
uy |
З |
R |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iS |
|
|
iSd |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
iSq |
|
|
|
|
|
iS |
sin C |
cos C |
|||
R |
|
|
R |
|
|
|
|
||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
uyA uyB uyC
iSA
iSC
m 
m

Рис.4.56. Функциональная схема системы управления моментом и скоростью АД с ориентацией по вектору потокосцепления ротора.

Измерение потокосцепления может быть выполнено с помощью установленных в зазоре двигателя двух датчиков Холла, сдвинутых в плоскости поперечного сечения АД на 90 эл. град. друг относительно друга. Датчики находятся под действием магнитного потока в зазоре, который вращается в пространстве, поэтому напряжения на выходах датчиков имеют синусоидальную форму, и сдвинуты друг относительно друга на 90 эл. град., т.е. представляют собой взятые в определенном масштабе проекции главного вектора потокосцепления на оси неподвижной системы координат , .
Формирование задающих сигналов (рис.4.56) выполняется в системе координат d, q, вращающейся с угловой скоростью С и ориентированной относительно вектора потокосцепления ротора. Собственно ориентирование выполняется с помощью преобразователей координат ПК1 и ПК2, выполняющих преобразование в функции выходных гармонических функций sin C , cos C век-
торного анализатора ВА.
Измеряемые с помощью датчиков тока фазные токи статора АД поступают в устройство вычисления ортогональных токов (ВОТ), которые вычисляют ортогональные проекции тока на оси системы координат , по формулам (без учета коэффициентов передачи датчиков тока):
iS iSA; |
|
|
||
|
1 |
|
|
(12) |
iS |
|
|
||
3 |
iSB iSC . |
|
||
|
|
|
|
|
Вычисленные значения iS , iS поступают в координатный преобразователь ПК2, формирующий на выходе ортогональные составляющие токов во вращающейся системе координат d, q, ориентированной по вектору потокосцепления ротора, по формулам:
i |
Sd |
i |
S |
cos |
C |
i |
S |
sin |
C |
; |
|
|||||
|
|
|
|
|
|
|
|
(13) |
||||||||
i |
|
i |
|
|
sin |
|
i |
|
|
cos |
|
|||||
Sq |
S |
C |
S |
. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
C |
|
||||||
Информация о необходимом угле ориентации C получается следующим
образом.
Измеренные с помощью датчиков Холла ортогональные проекции m иm вектора главного магнитного потокосцепления поступают в устройство
вычисления потокосцепления ротора (ВПР), которое реализует следующие зависимости (без учета коэффициентов передачи датчиков Холла):
|
|
1 |
|
|
|
|
|
|
|
R kR m LR iS ; |
(14) |
||||||||
|
|
k 1 |
|
L |
|
|
|
|
|
R |
m |
R |
i |
S |
. |
|
|||
|
R |
|
|
|
|
||||
Далее ортогональные проекции вектора потокосцепления ротора поступают в векторный анализатор (ВА), который вычисляет модуль вектора потокосцепления ротора
|
|
2 |
2 |
(15) |
R |
|
R |
R |
|
и гармонические функции его углового положения

cos |
|
|
|
R ; |
sin |
C |
|
R |
, |
(16) |
C |
|
|
||||||||
|
|
|
|
|
|
|
||||
|
|
|
|
R |
|
|
|
R |
|
|
которые и участвуют в координатных преобразованиях ПК1 и ПК2 для ориентации системы координат, в которой реализуется управление.
Собственно система управления имеет два канала регулирования – модуля вектора потокосцепления ротора R и угловой скорости двигателя. Каждый из каналов выполнен в виде двухконтурной СПР, причем два подчиненных внутренних контура выполняют регулирование составляющих тока статора iSd
(тока возбуждения) и iSq (моментного тока) в осях ортогональной системы ко-
ординат d, q.
Сформированные на выходе регуляторов тока РТd и РТq напряжения поступают на блок компенсации БК, предназначенный для компенсации внутренних ПОС двигателя (подробнее о блоке ниже). На выходе БК напряжения управления uyd и uyq ПЧ с помощью преобразователя координат ПК1 преобразуются к напряжениям управления uy и uy в неподвижной ортогональной системе координат , в соответствии с формулами
u |
|
u |
|
cos |
|
u |
|
sin |
|
; |
|
|
||
u |
y |
u |
yd |
sin |
|
C |
u |
|
yq |
cos |
C |
|
, |
(17) |
y |
yd |
C |
yq |
C |
, |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||
и затем (с помощью преобразователя фаз ПФ) – к напряжениям uyA, uyB и uyC в фазных координатах по формулам
uyA uy ; |
|
|
|
||
|
|
|
|||
|
1 |
|
3 |
|
|
uyB |
uy |
|
(18) |
||
2 |
2 |
uy ; |
|||
|
|
|
|
||
uyC |
1 |
uy |
3 |
|
|
2 |
2 |
uy . |
|
||
|
|
|
|
||
Полученные напряжения поступают в систему управления коммутацией силовых ключей ПЧ.
Задание на электромагнитный момент АД формируется выходным сигналом регулятора скорости РС, ограничение которого обеспечивает соответствующее ограничение момента двигателя. В функции задания на момент формируется задание на моментный ток iSq (посредством блока деления БД).
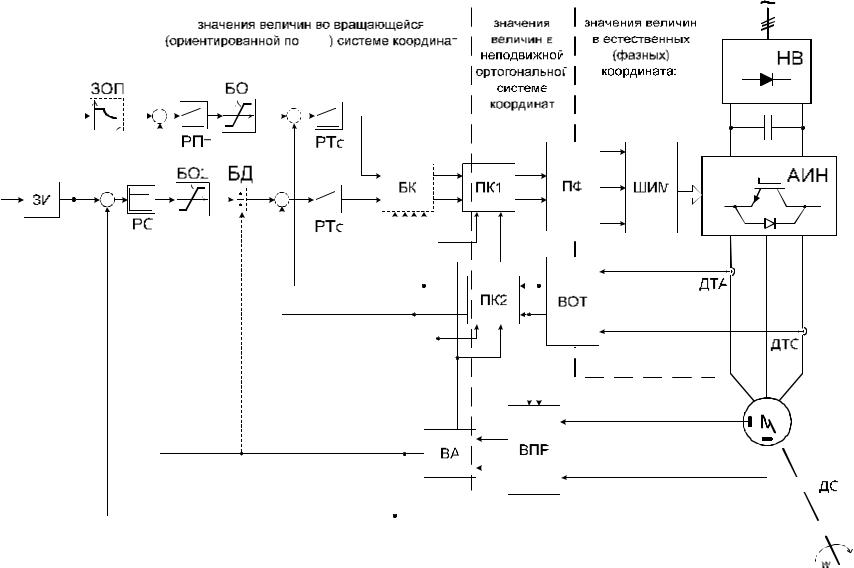
Контур регулирования модуля потокосцепления ротора должен обеспечивать стабилизацию модуля на заданном уровне. Это задание должно быть постоянным при регулировании частоты и скорости только в первой зоне (ниже номинальной). Во второй зоне задание на модуль потокосцепления должно уменьшаться обратно пропорционально скорости.
С целью универсализации системы в канал формирования напряжения задание на модуль потокосцепления ротора включают задатчик ослабления поля (ЗОП), реализующий зависимость (рис.4.58), аналогичную той, которая реализуется в системах двухзонного регулирования скорости ДПТ с раздельным управлением.
U .З k R.З |
|
Основными |
недостатка- |
||
R |
|
ми системы Transvektor приня- |
|||
|
|
|
|
||
k RH |
|
то считать: |
|
||
|
|
1) |
Сложность системы |
||
|
|
регулирования и громоздкость |
|||
|
|
вычислений, связанных с необ- |
|||
|
U .З k З |
ходимостью ориентации сис- |
|||
|
темы координат. Поэтому в на- |
||||
k 0 |
k max |
стоящее время реализация сис- |
|||
Рис.4.58. Зависимость, формируемая |
тем векторного управления вы- |
||||
полняется |
только |
средствами |
|||
задатчиком ослабления поля (ЗОП). |
|||||
микропроцессорной |
техники. |
||||
|
|
||||
Разработанные в 1970-х – 1980- х гг. устройства аналоговой реализации систем векторного управления [Слежановский] не получили широкого распространения в промышленности из-за вносимых погрешностей регулирования и дрейфа параметров элементов.
2) Неэффективность измерения потокосцепления ротора с помощью датчиков Холла (или дополнительных измерительных обмоток) из-за их низкой надежности. В настоящее время вместо непосредственного измерения потока используют его косвенное определение с помощью математических моделей потока или наблюдателей, которые строятся на основании математической связи вектора потокосцепления с векторами электрических величин, а также скорости АД, легко доступных для измерения.
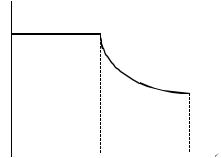
Компенсация внутренних ПОС двигателя
Выше отмечалось, что внутренние ПОС двигателя обусловливают взаимное нелинейное влияние составляющих тока статора друг на друга. При этом степень влияния этих связей зависит как от параметров двигателя, так и от его режима работы. Для получения качественного независимого управления током возбуждения и моментным током АД это взаимное влияние должно быть исключено.
Эта задача решается путем введения в систему блока компенсации БК. При этом принцип компенсации математически аналогичен тому, который использовался для компенсации противо-ЭДС двигателя в ЭП постоянного тока, а именно – сигналы (11) заводятся с противоположным знаком на вход АИН (в область сигналов в ориентированной системе координат d, q). Отличие заключается лишь в большем количестве сигналов, подлежащих компенсации.
В зависимости от требований, предъявляемых к электроприводу в конкретном случае, может выполняться частичная компенсация (т.е. компенсация только наиболее влияющих) ПОС. В низковольтных ЭП малой и средней мощности таковыми обычно являются ЭДС вращения ed и eq , в меньшей степени
влияют e и противо-ЭДС e .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В наиболее общем слу- |
||||
|
|
|
1 kд.п |
|
|
|
|
|
|
чае компенсации |
всех ПОС |
|||||||
|
|
|
|
|
|
|
|
|
двигателя |
вариант |
структур- |
|||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
ной схемы |
блока |
БК может |
|||||
|
|
|
kR |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
иметь вид, показанный на |
|||||||||
|
|
|
TRk |
|
|
|
|
|
|
|||||||||
uуd |
|
|
|
|
|
|
|
рис.4.59. Очевидно, что струк- |
||||||||||
|
uуd |
k |
|
uSd |
||||||||||||||
|
|
|
|
|
|
|
тура БК повторяет структуру |
|||||||||||
|
|
|
iSd |
|
|
|
|
|
T p 1 |
|
|
внутренних |
связей двигателя. |
|||||
|
1 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
В схеме учитывается, что дат- |
|||||||
|
kд.m |
|
|
|
|
|
L |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
iSq |
|
|
|
S |
|
|
|
|
|
|
чики тока, потокосцепления и |
||||
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
k |
C |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
скорости имеют коэффициен- |
||||||||||
|
|
|
|
|
|
|||||||||||||
|
kд.m |
|
|
|
|
|
|
|
|
|
|
|
|
ты передачи kд.т, kд.п и kд.с |
||||
|
|
|
|
kRRR |
|
|
|
|
|
|
||||||||
uyq |
|
|
|
|
|
|
uyq |
|
|
|
uSq |
соответственно. |
Поэтому на |
|||||
|
|
|
|
|
|
|
k |
|||||||||||
|
|
|
kR |
k |
|
|
T p 1 |
|
|
входах БК выполняется деле- |
||||||||
|
|
|
|
|
|
|
|
|
ние на соответствующие ко- |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эффициенты. |
|
|
||
|
|
R |
|
|
|
|
|
|
|
|
|
Кроме того, здесь ис- |
||||||
|
|
|
zp |
kд.c |
|
|
|
|
|
|
пользуется то свойство, что |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
модель реального АИН спра- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ведлива |
и |
в |
ортогональной |
|
Рис.4.59. Структурная схема блока компенсации |
системе координат d, q, при- |
|||||||||||||||||
влияния внутренних ПОС двигателя. |
|
чем для каждой составляющей |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(поскольку |
сигналы не явля- |
|||
ются гармоническими) можно использовать аппроксимирующую ПФ
WАИН p |
u |
Sd |
p |
|
k |
, |
(19) |
|
|
T p 1 |
|||||
|
U yd p |
|
|
|
|||
что и показано на рис.4.59.
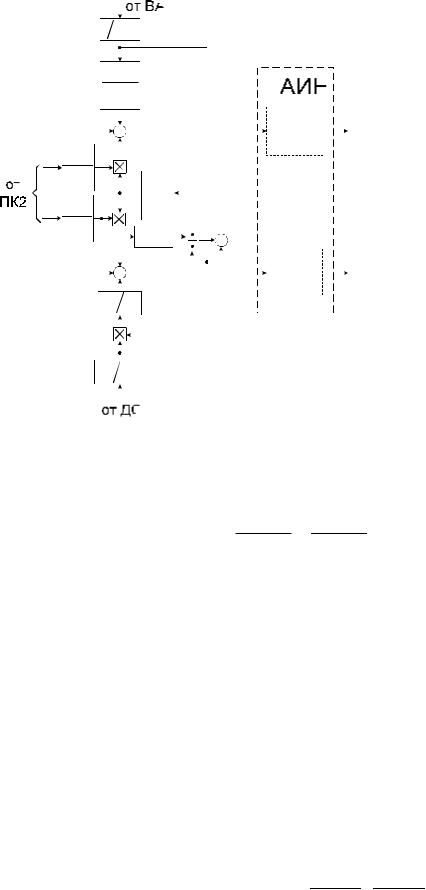
Структурная схема системы "трансвектор"
В предположении, что все внутренние ПОС двигателя скомпенсированы, на основе структурной схемы АД (рис.4.55) и представления АИН с помощью передаточных функций (19) может быть составлена структурная схема системы векторного управления в ортогональной системе координат d, q, ориентированной по вектору потокосцепления ротора (рис.4.60).
На основании структурной схемы (рис.4.60) могут быть определены передаточные функции регуляторов системы.
Два контура тока являются идентичными, поэтому, используя традиционный подход к определению передаточной функции РТ, получим:
WPTd p WPTq p |
Rl |
Tl p 1 |
, |
(20) |
|
k kд.т |
TT p |
|
|
где TT – постоянная времени интегрирования разомкнутого КРТ.
|
|
|
|
|
kд.п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kд.т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uЗ.Id |
|
uyd |
|
uSd |
|
|
|
|
|
|
|
|
|
|
|
u |
З. W |
k |
1 R |
|
|
|
L |
|
R |
|||||||||
|
|
p |
W p |
T p 1 |
|
l |
iSd |
|
|
m |
|
||||||||
|
|
PП |
|
|
|
PTd |
|
Tl p 1 |
TR p 1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 kд.п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
uЗ.Iq |
|
uyq |
|
uSq |
|
iSq |
|
|
|
|
|
|
|
|
u |
|
WPС p |
k |
1 R |
|
|
|
3 |
|
|
1 |
|
|||||||
З. |
WPTq p |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
l |
|
|
|
|
2 zpkR |
|
|
|
||||
|
|
|
|
|
|
T p 1 |
|
T p 1 |
|
|
|
|
|
Jp |
|
||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
kд.т
kд.с 
Рис.4.60. Структурная схема системы векторного управления АД.
При выборе передаточной функции РТ в виде (20) ПФ замкнутого КРТ будет равна:
KKPT p |
|
i p |
|
|
1 kд.т |
, |
(21) |
|||
U |
З.I |
p |
T T p2 |
T p 1 |
||||||
|
|
|
|
|||||||
|
|
|
|
|
T |
T |
|
|
||
причем часто прибегают к апериодической настройке КРТ, принимая TT 4T , поскольку из-за малой реальной инерционности T АИН с ШИМ контуры то-
ков и в этом случае получатся достаточно быстродействующими.
Контур регулирования модуля потокосцепления ротора синтезируют, представляя внутренний контур тока id с помощью ПФ (21). Тогда при тради-
ционном подходе к синтезу получим следующую передаточную функцию РП:
WPП p |
kд.т |
TR p 1 |
, |
(22) |
|
Lmkд.п |
TП p |
|
|
где принимают TП 2TT .
Подход к синтезу контура скорости аналогичен, но, поскольку в объекте регулирования присутствует коэффициент R , который может изменяться су-
щественно при регулировании скорости во второй зоне и ослаблении потока АД, для линеаризации контура последовательно с РС включают блок деления
БД, выполняющий деление на текущее значение модуля вектора R . Тогда в соответствии со схемой рис.4.60 можно принять:
WPC p |
2kд.тJ |
, |
(23) |
|
3z pkRkд.сTC |
||||
|
|
|
где TC 2TT , что соответствует П-регулятору скорости.
Статические характеристики системы векторного управления аналогичны характеристиками системы двухзонного управления скоростью ДПТ с раздельным управлением, а динамические характеристики оказываются на порядок лучше из-за малой по сравнению с ТП инерционности ПЧ.