

matlab / отчет4
.doc
Завдання
Складіть структурні схеми АД з короткозамкненим ротором у фазних та ортогональних координатах для випадку живлення АД від ідеального джерела синусоїдного струму. Параметри АД взяти з табл.1.1, структуру моделей та кутову швидкість обертання ортогональної системи координат – з таб л.4.1 відповідно до номеру варіанту.
Виконайте моделювання прямому пуску АД, накиду та скиду номінального навантаження. Завдання струмів статора АД виконуйте за допомогою відповідної напругової моделі. Виконайте орієнтування системи координат за вектором потокозчеплення, що входить до структури моделі. Повторіть моделювання указаних режимів.
У всіх випадках отримуйте залежності миттєвих (складових) та амплітудних значень електромагнітних величин, що відповідають структурі моделі, а також електромагнітного моменту та частоти обертання ротора АД в функції часу, порівнюйте сигнали з виходу струмової моделі із відповідними сигналами напругової моделі.

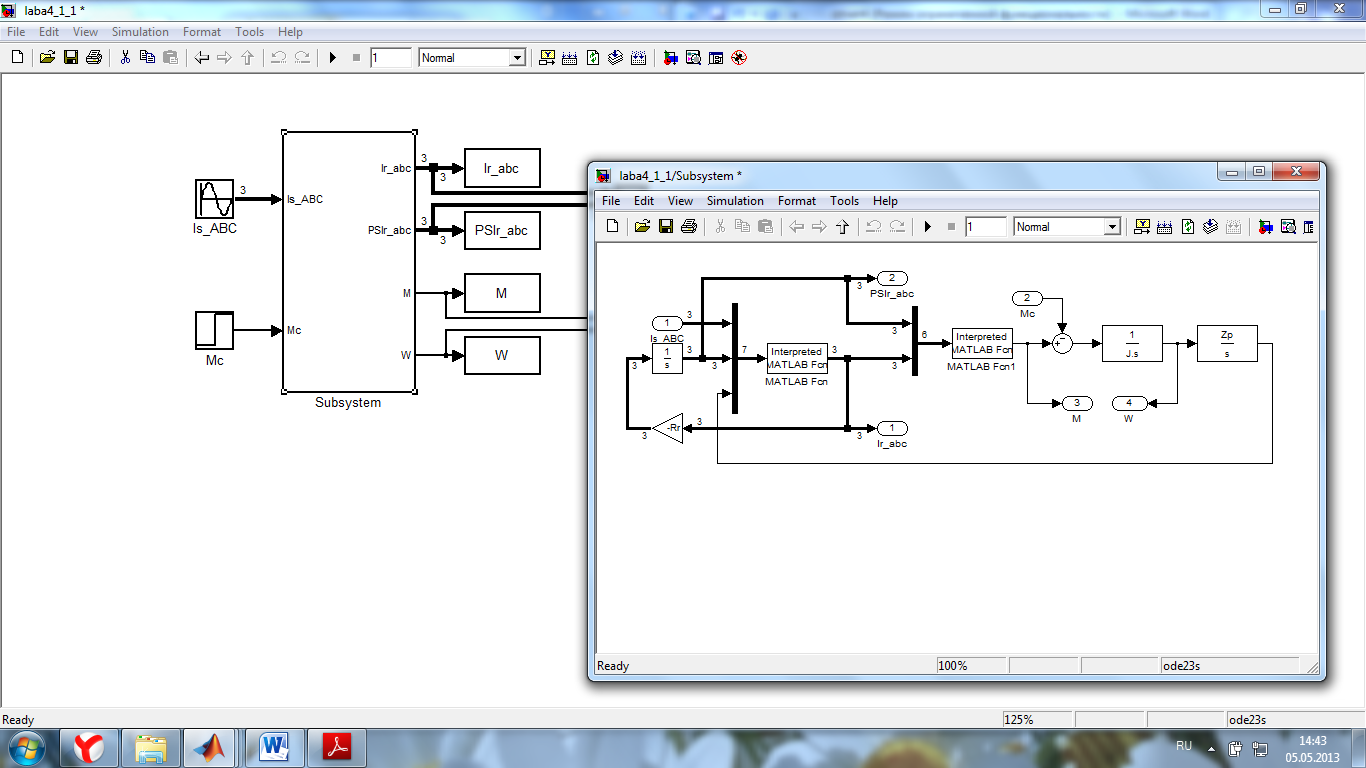
Рисунок 4.1 – Модель АД з короткозамкненим ротором при живленні статора від джерела струму у фазних координатах
Программа 1:
clc, close all
global Lm Err Zp
Uslen=380; fs=50; J=0.028;
Pn=2200; Ixx=4.6; nn=875; Zp=3;
Rs=3.6; Xssigma=2.58; Is=7.2;
Rr=5.7; Xrsigma=2.63; Ir=4.5;
n0=3000/Zp;
sn=(n0-nn)/n0;
w0=2*pi*n0/60;
wn=w0*(1-sn);
wsn=2*pi*fs;
Usfen=Uslen/sqrt(3);
Usfm=Usfen*sqrt(2);
Mn=Pn/wn;
Xm=(Usfen-Ixx*sqrt(Rs^2+Xssigma^2))/Ixx;
Lssigma=Xssigma/(2*pi*fs);
Lrsigma=Xrsigma/(2*pi*fs);
Lm=Xm/wsn;
sigmas=Lssigma/Lm;
sigmar=Lrsigma/Lm;
Ks=1/(1+sigmas);
Kr=1/(1+sigmar);
Ess=1+(3/2*sigmas);
Err=1+(3/2*sigmar);
Tr=(Lm+Lrsigma)/Rr;
Ts=(Lm+Lssigma)/Rs;
Программа 2:
function Ir = lab4_1_1(u)
global Lm Err
Is=u(1:3); PSIr=u(4:6);
Is=Is(:); PSIr=PSIr(:);
tetar=u(7);
c1=cos(tetar);
c2=cos(tetar+2*pi/3);
c3=cos(tetar+4*pi/3);
Lrr=[ Err -1/2 -1/2;
-1/2 Err -1/2;
-1/2 -1/2 Err]*2/3*Lm;
Lrs=[c1 c3 c2;
c2 c1 c3;
c3 c2 c1]*2/3*Lm;
Ir=Lrr\(PSIr-Lrs*Is);
Программа 3:
function M_em = lab4_1_2(u)
global Zp Lm
u=u(:)';
D=[0 1 -1; -1 0 1; 1 -1 0];
PSIr=u(1:3)';
Ir=u(4:6);
M_em=Zp*Ir*D*PSIr/sqrt(3);
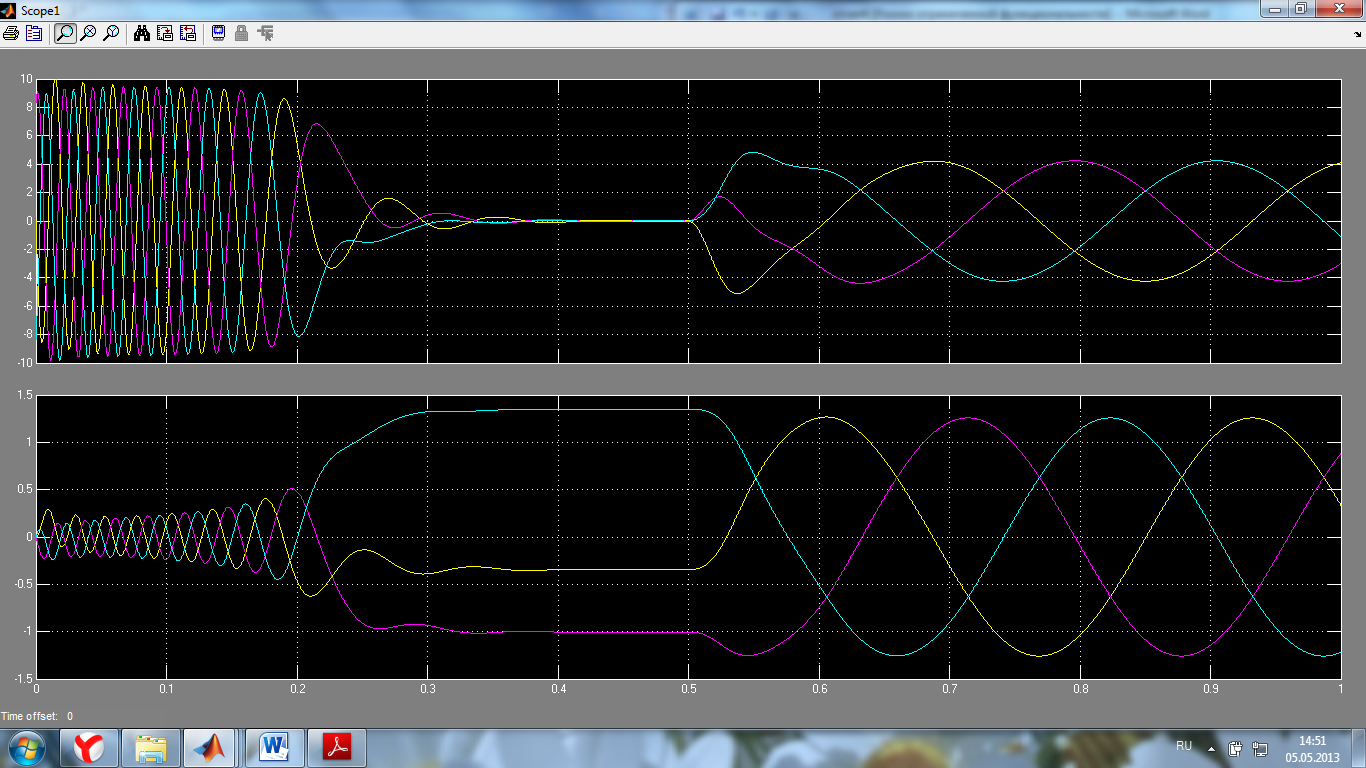
Рисунок 4.2 – Токи ротора (a,b,c) та PSIr_abc
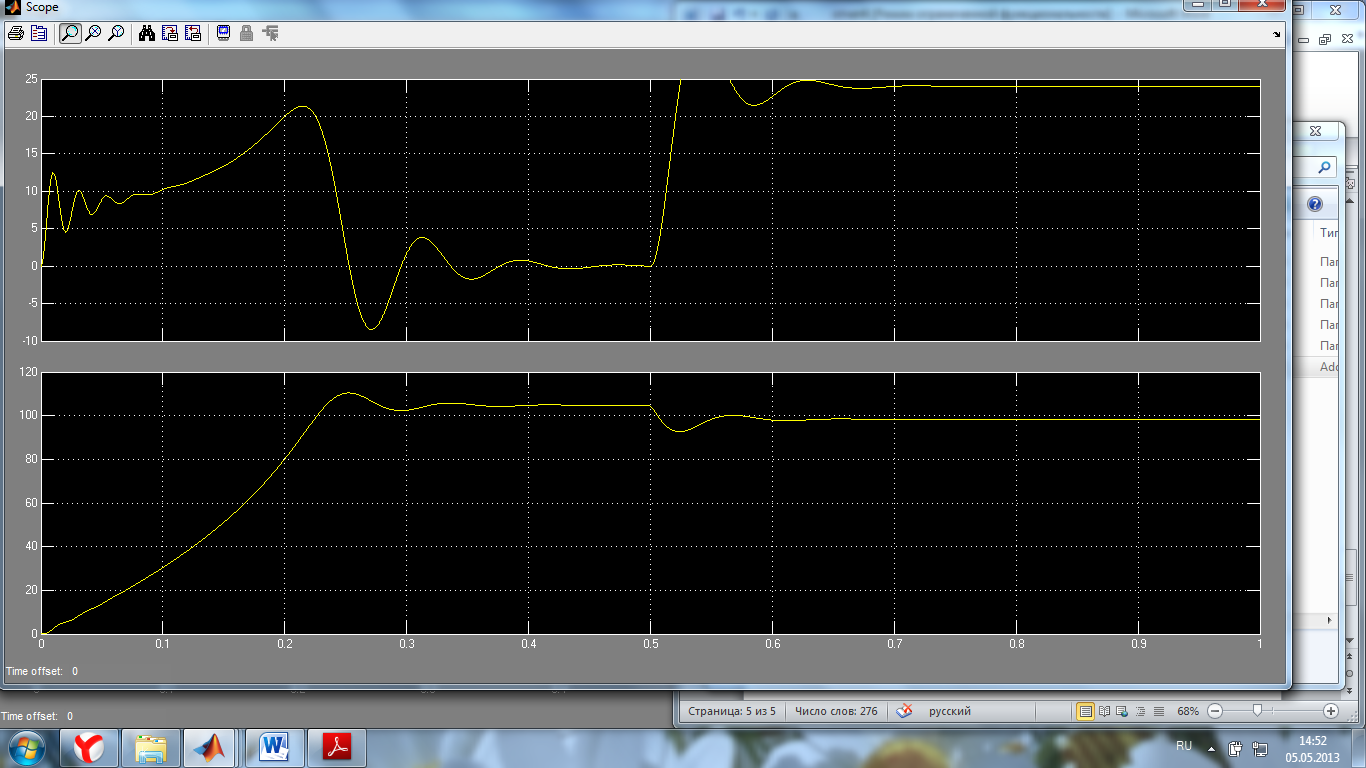
Рисунок 4.3 – Момент та швидкість