

СПКД123 / СПДК / Задачи АСУТП / Лекция . Операционные системы реального времени
.doc|
Лекция 6. Диспетчерские пункты АСУТП. Архитектура программных комплексов Содержание лекции:
Диспетчерское управление в общем виде представляет из себя планирование и реализацию комплекса мероприятий, направленных на обеспечение безопасного функционирования технологического объекта с целью контроля за производственным процессом. Основой для создания системы управления является модель процесса. Для системы управления технологическим оборудованием – это модель технологического процесса и его компонентов, для автоматизации производственно-хозяйственной деятельности – это модель бизнес-процессов, которые организуют и в которых участвуют автоматизируемые службы и подразделения. Диспетчерское управление требует интегрированного подхода – создания и реализации как технологической модели, так и бизнес-модели работы предприятия. Ужесточение норм и правил промышленной и экологической безопасности требуют значительного повышения качества контроля за системой, снижения времени реакции при аварийных ситуациях. Такие задачи успешно решаются специальным классом программного обеспечения, носящим название SCADA-системы (подробнее о них ниже), инсталлированных в составе диспетчерского комплекса. Но решение только таких задач недостаточно. Диспетчер управляет не только оборудованием (часто оборудованием управляют САУ в автоматическом режиме по заданным уставкам). Диспетчер управляет также выполнением контрактных обязательств, он оперирует заказами, контрактными условиями, непосредственно участвует в размещении заказов и в формировании цены на оказываемые для заказчиков услуги. Он (диспетчер) общается с заказчиками, покупателями и поставщиками. В условиях открытого рынка, диспетчер, является ключевым звеном сложной цепочки организации поставок. При этом действия диспетчера определяются различными регламентами и ограничениями: технологическими, законодательными, контрактными.
Вернемся к разделению функций диспетчерского управления на два класса: управление оборудованием (технологией) и управление поставками, или собственно деятельностью предприятия. С точки зрения автоматизации, выделяются отдельно системы на управление оборудованием, отдельно на управление потоками-поставками. Управление оборудованием относится к задачам систем класса АСУТП, или SCADA-систем (английская аббревиатура – ^ Supervisory Control and Data Acquisition - диспетчерское управление и сбор данных). Это:
Управление производственной деятельностью предприятия – задачи, относящиеся по современной терминологии к классу MES (от англ.Manufacturing Execution Systems - системы управления производством, производственные исполнительные системы):
Важной особенностью диспетчерского управления является необходимость интеграции двух представленных классов задач диспетчерского управления – SCADA и АСДУ (MES), а также интеграции с ERP-системами предприятия. ERP-системы традиционно не автоматизируют комплекс диспетчерских задач, прежде всего вследствие его специфичности, наличия компоненты реального времени, большого числа модельных и расчетных процедур и общей доли обработки информации о физических процессах. Данное разделение функций полностью соответствует модели автоматизации по стандарту ISO95.
За 20 лет развития индустрии автоматизации (с середины 70-х до середины 90-х гг.) произошел переход от заказных программно-технических комплексов (с преобладанием технической составляющей, причем ТС также разрабатывались на заказ, в лучшем случае с использованием универсальной элементной базы) – к внедрению настраиваемых на конкретный объект автоматизации тиражируемых, универсальных решений. При этом техническая и программная платформа диспетчерских пунктов независимы (выбирается тип архитектуры вычислительного комплекса (RISC, Intel), одна из операционных систем (версии UNIX, Windows, QNX и др.), тиражируемый программный комплекс АСУТП для выбранной платформы (более 30)). В настоящее время на рынке автоматизированных систем управления технологическими процессами присутствует большое количество тиражируемых систем, решающих все основные задачи, предъявляемые к системам управления «верхнего уровня»: ведение базы данных реального времени и журнала тревог, отображение оперативной технологической информации, графиков (трендов), создание отчетов, взаимодействие с системами линейной телемеханики и цеховой автоматики (в т.ч. выдача команд телеуправления), предоставление стандартных интерфейсов для межпрограммного взаимодействия. Поскольку различные производители программных средств АСУТП ориентируются на использование различных операционных систем (Windows, различные клоны UNIX, QNX) и рекомендуют различные аппаратные платформы, то при разработке АСУТП производственного объекта нужно говорить о выборе не только программных средств АСУТП; требуется анализировать программно-технический комплекс в целом. В данной лекции рассматривается архитектура программных комплексов АСУТП; модульность, межпрограммное взаимодействие, применимость понятия «открытой системы» к АСУТП. В следующих лекциях будут проанализированы: Тип (модель) базы данных АСУТП и ее влияние на производительность, функциональность и эксплуатационные характеристики системы в целом; Средства формирования графиков, отчетов; ведение журнала тревог, выполнение плановых и расчетных задач; Платформа функционирования АСУТП, требования к системному программному обеспечению и техническим средствам. Управление технологическими процессами с использованием SCADA систем стало осуществляться в передовых западных странах в 80-х годах XX в. В России активное использование новой концепции началось несколько позднее. В настоящее время на рынке представлено несколько десятков SCADA-систем. В табл. 6.1 приведен список распространенных тиражируемых программных комплексов АСУТП, с классификацией по типам БД и платформе (операционной системе). Таблица 6.1. Тиражируемые программные комплексы АСУТП.
Все
современные АСУТП являются сложными
программными комплексами, реализующими
большой набор различных функций в
реальном (или близком к реальному)
времени, что делает невозможным,
используя существующие технологии
программирования и операционные
системы, разработку одного универсального
исполняемого модуля, выполняющего
все задачи АСУТП и оперирующего всеми
ресурсами. Эволюция развития существующих
тиражируемых программных комплексов
привела к выработке достаточно общей
универсальной архитектуры – логической
структуры системы, образуемой ее
модулями.
Таблица 6.2. Программные модули типовой ДП АСУТП RTAP/Plus.
Также в состав тиражируемых программных комплексов АСУТП входят средства настройки АСУТП на конкретный объект автоматизации: программы создания базы данных, оконного интерфейса и мнемосхем ТП на базе поставляемых шаблонов, средства тестирования и т.п. Одна из тенденций развития современных АСУТП – это перенос процедур первичной обработки данных «вниз», с более высокого уровня управления (диспетчерский пункт АСУТП) на более низкий уровень программируемых логических контроллеров. Соответственно, основными для ДП АСУТП становятся функции сохранения данных, их отображения и передачи в АСУПХД, системы учета расхода и т.п.
В число современных требований к любой информационной системе входит «соответствие стандартам открытых систем». На практике это означает требование поддержки распространенных интерфейсов межпрограммного взаимодействия и обмена данными, возможности функционирования в сетевой среде и т.п. Анализ показывает, что степень «открытости» системы определяется двумя факторами: либо использованием в качестве базовых компонентов АСУТП программного обеспечения от крупных фирм-разработчиков (например, база данных пакета Wonderware IndustrialSQL Server является «надстройкой» над Microsoft SQL Server), либо изначальной ориентированностью при разработке системы на ее функционирование в многоплатформенной среде. В настоящее время в связи с подавляющим превалированием по числу инсталляций ОС Windows производители, ориентировавшиеся на UNIX, выпускают по крайней мере клиентские автоматизированные рабочие места для Windows. Взаимодействие UNIX-Windows реализуется либо универсальным механизмом объектного взаимодействия CORBA, либо специальным ПО. В любом случае используется сеть TCP/IP. В подавляющем большинстве СУБД АСУТП реализован доступ к хранимым данным через ODBC и NetDDE – широко распространенные стандарты информационного обмена между приложениями. Любая АСУТП должна получать данные технологического процесса из внешней среды, которую, собственно, она и контролирует. Выделяются различные способы получения данных от оборудования (интеллектуальных датчиков, ПЛК и цеховых САУ) – периодический опрос всех значений, получение измененных значений, получение аварий. В первых двух случаях данные передаются по запросу АСУТП, передача тревог обычно инициируется самим оборудованием. В ряде систем выделяется отдельный процесс («скан-менеджер»), осуществляющий управление опросом ПЛК, сохранение полученных данных (в выделенной области памяти или непосредственно в БД), управление процессами, реализующими информационный обмен по универсальным и специальным протоколам. На платформе Windows широко распространено использование OPC (OLE for Process Control, объектное взаимодействие в системах управления ТП). Универсальный OPC-клиент используется со стороны АСУТП, каждый производитель ПЛК поставляет свой OPC-сервер. В настоящее время существует более 200 OPC-серверов, и как следствие не требуется реализовывать ПО стыка каждой конкретной АСУТП со всеми моделями ПЛК. Универсальные «скан-задачи» для АСУТП на базе UNIX-платформы не получили широкого распространения, а аналогичные OPC механизмы объектного взаимодействия (CORBA) являются слишком «тяжелыми» для интенсивного обмена технологическими данными между ПЛК и системами реального времени. Несмотря на все многообразие стандартно реализуемых тиражируемым программным обеспечением функций, часто возникают задачи, наиболее эффективный способ решения которых – написание отдельной программы, оперирующей технологическими данными, хранящимися в БД АСУТП. Такими задачами могут являться:
Также при разработке универсального отраслевого решения может потребоваться разработать программные средства для быстрой перенастройки (обновления) базы данных. Возможность создать все вышеуказанные программы определяется наличием и развитостью API – интерфейса прикладного программирования АСУТП. Стандартным в настоящее время является поставка API в виде библиотек функций и заголовочных файлов языка С++, являющегося наиболее распространенным средством разработки ПО. Их использование позволяет создавать программы, обращающиеся к внутренним функциям DLL библиотек программного комплекса. Подводя итог анализа архитектур и качественных характеристик рассматриваемых программных комплексов, можно говорить, что универсальная структура организации компонентов и приведенные критерии оценки настолько распространены, что могут считаться требованиями, предъявляемыми ко всем системам и которым в большей степени удовлетворяют большинство из присутствующих на рынке систем. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
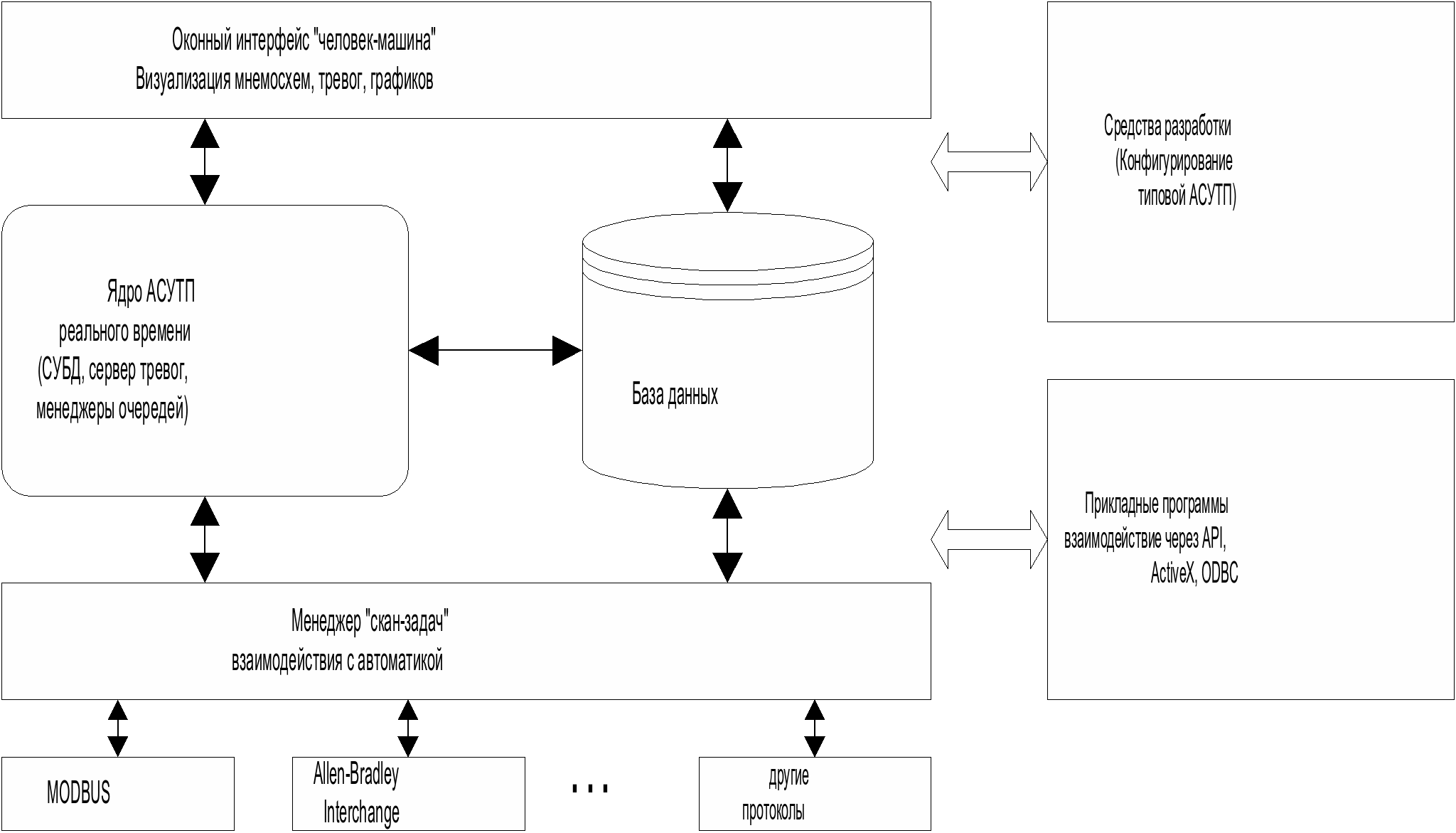 Рис.
6.1. Структура программного комплекса
тиражируемой АСУТП.
Выделяют
отдельные программные модули:
Рис.
6.1. Структура программного комплекса
тиражируемой АСУТП.
Выделяют
отдельные программные модули:1 2 3 4 5 6 7 8 9 ... 14