

Часть 1. Механика
Механикой называется раздел физики, посвященный изучению закономерностей простейшей формы движения материи – механического движения. Механическое движение состоит в изменении с течением времени взаимного расположения тел или их частей в пространстве.
Механика состоит из трех основных разделов: статики, кинематики и динамики. В статике рассматривают законы сложения сил и условия равновесия тел. В кинематике исследуют характеристики и закономерности различных типов механического движения тел безотносительно к тем причинам, которые обеспечивают осуществление рассматриваемого типа движения. В динамике изучают влияние взаимодействия между телами на их механическое движение.
Глава 1. Кинематика
Кинематика материальной точки и
поступательного движения твердого тела
Предварительные понятия
Для описания движения тела в пространстве и времени используют физические модели. Простейшая физическая модель тела – материальная точка. Материальной точкой называется тело, формой и размерами которого в данной задаче можно пренебречь. Всякое тело можно мысленно разбить на большое число частей, сколь угодно малых по сравнению с размерами всего тела. Каждую такую часть можно рассматривать как материальную точку, а само тело или любую систему тел – как систему материальных точек.
Если деформация тела при его взаимодействии с другими телами в рассматриваемом процессе пренебрежимо мала, то удобно пользоваться моделью абсолютно твердого тела. Абсолютно твердое тело – тело, расстояние между двумя точками которого в условиях данной задачи можно считать постоянным. Иначе говоря - это тело, формы и размеры которого не изменяются при его движении.
Положение тел в пространстве можно определить только по отношению к другим телам. Абсолютно твердое тело, по отношению к которому рассматривают движение исследуемого тела, называется системой отсчета. С системой отсчета жестко связывают систему координат, так что положение любой точки определятся значениями трех координат этой точки. Наиболее часто пользуются прямоугольными декартовыми координатами: x, y, z.
Z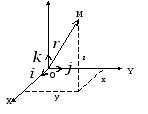
Рис. 1.1.
Схематическое изображение положения материальной точки в пространстве
Положение
точки М относительно системы отсчета
можно задать не только с помощью трех
ее декартовых координат x,
y,
z,
но также с помощью векторной величины
- проведенного в точку М из начала системы
координат (точки О) радиуса - вектора
![]() (см. рис. 1.1). Если
(см. рис. 1.1). Если![]() -
единичные вектора осей прямоугольной
декартовой системы координат, то
-
единичные вектора осей прямоугольной
декартовой системы координат, то
|
|
(1.1.1) |
При
движении материальной точки М ее
координаты x,
y,
z
и
![]() меняются
со временем. Поэтому для задания закона
движения необходимо знать либо уравнения
зависимости координат точки от времени:
меняются
со временем. Поэтому для задания закона
движения необходимо знать либо уравнения
зависимости координат точки от времени:
|
|
(1.1.2,а) |
 ,
,
либо уравнение
|
|
(1.1.2,б) |
Уравнения (1.1.2,а) и (1.1.2,б) называются кинематическими уравнениями движения материальной точки.
Траекторией материальной точки называют линию, которую описывает в пространстве сама точка при ее движении. В зависимости от формы траектории различают прямолинейное и криволинейное движение точки. Если все участки траектории лежат в одной плоскости, то движение называется плоским.
Длиной пути S материальной точки называют сумму длин всех участков траектории, пройденных точкой за рассматриваемый промежуток времени.
Вектором
перемещения
![]() материальной
точки за времяt
= t1
- t
называется вектор, проведенный из
положения этой точки в момент времени
t
в ее положение в момент t1,
то есть приращение
материальной
точки за времяt
= t1
- t
называется вектор, проведенный из
положения этой точки в момент времени
t
в ее положение в момент t1,
то есть приращение
![]() заt;
заt;
![]() (см. рис. 1.2.).
(см. рис. 1.2.).
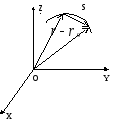
Рис. 1.2.
Схематическое
изображение вектора перемещения точки
за время от t
до t1,
равного
![]()
При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории. Так как перемещение - вектор, то имеет место закон независимости движений, (подтверждающийся в эксперименте):
Если точка одновременно участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме перемещений, совершаемых точкой за одно и тоже время в каждом из движений отдельно.
Для измерения длины пути и перемещения используют меру длины – метр (м) в системе СИ и – сантиметр (см) в системе СГС.