

Метрологія / КонЛекМетр / TEMA_13
.DOCТЕМА13 : МОСТОВI ВИМIРЮВАЛЬНI ЛАНЦЮГИ
ТА ПРИЛАДИ
Мости пiдроздiляються на: врiвноваженi та неврiвноваженi, постiйного та змiнного струму, чотирьохплечі та багатоплечі.
Врiвноваженi мости застосовуються тiлькi у лабораторнiй практицi або для перевiрки зразкових та робочих засобiв. Неврiвноваженi мости знайшли застосування у промисловостi для контроля та керування технологiчними процесами.
Мост постiйного струму
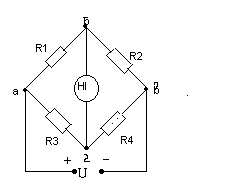
На схемі: а,б,в,г – вершини мосту;
аб,бв,вг,га – плечi мосту;
ав – диагональ живлення;
бг – вимiрювальна диагональ (iндикаторна);
НI – (нуль-iндiкатор) – вимiрювальний прилад.
В якостi НI у мостах постiйного струму використовуються мiкроамперметри магнiтоелектричної системи або магнiтоелектричні гальванометри. У мостах змiнного струму застосовуються вiбрацiйнi або осцилографiчнi гальванометри.
Загальне рівняння струму через вимiрювальну диагональ можна одержати через закони Кiрхгофа :
![]() , (*)
, (*)
де Rні - опір нуль-індикатора.
Для врiвноваженого мосту IНІ = 0, отже
R1 ·R4 = R2 ·R3
Цей вираз має назву рівняння балансу мосту.
Якщо один з опорiв невідомий, то змінюючи параметри другого опору та встановивши рiвновагу мосту, можна визначити невiдомий опiр.
У мостах змінного струму активний опiр R замiнюють на комплексний опiр Z , тодi рівняння балансу матиме вигляд:
Z1Z4 =Z2Z3 ,
А рівняння (*)
![]() . (**)
. (**)
Оскiлькi
![]() , рiвняння балансу зводиться до вигляду
:
, рiвняння балансу зводиться до вигляду
:
![]()
Ця рівність виконуеться при умові:
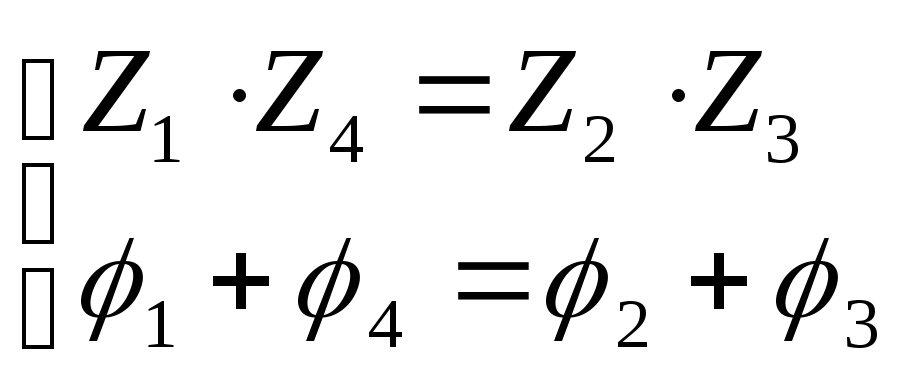 (***)
(***)
Таким чином, складнiсть настройки мостiв змiнного струму полягає у тому, що вона необхiдна не тiльки по модулю Z, але й по фазi φ. Тому мости змiнного струму менше використовуються, нiж мости постiйного струму.
За допомогою мостів змінного струму можна у широкому частотному діапазоні вимірювати різні параметри електричних ланцюгів (R, L, C, Q, tg δ).
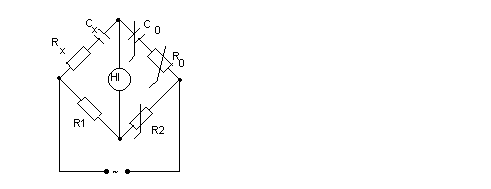
Вимірювання 'ємності і tg δ мостовим методом
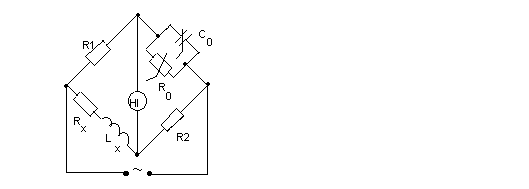
Живлення мостiв для вимірювання ємності звичайно здiйснюється струмом звукової частоти, так як на великих частотах на результат вимiрювання впливають паразитнi 'ємностi та iндуктивностi. Мост має вигляд:
![]()
Умова рівноваги такого мосту:
![]()
Прирівнюємо дійсні та уявні частини:
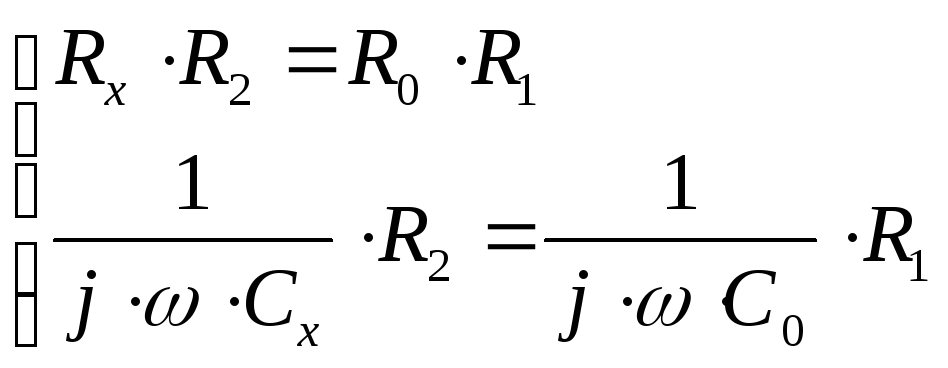
Звідси:
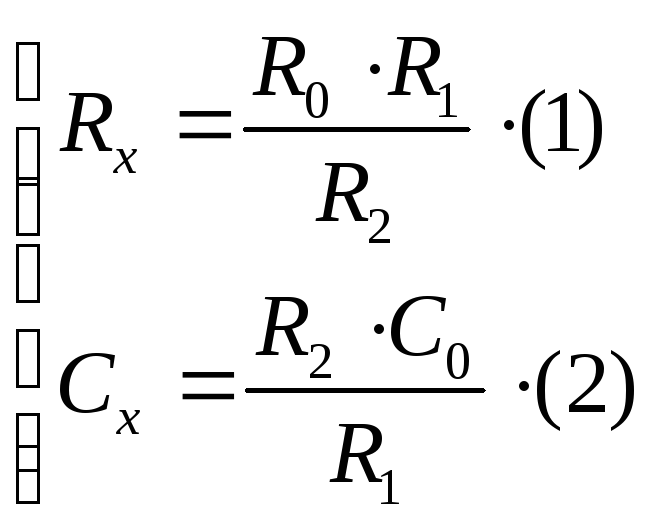
Попередньо змiнюючи Со та R2 добиваються виконування рiвностi (2). Рівність (1) досягаеться зміною R0. Цим же методом вимiрюють тангенс кута втрат конденсатора.
![]()
![]()
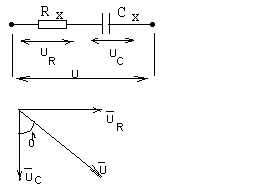
![]() Як
відомо, тангенс кута діелектричних
втрат конденсатора можно визначити як:
Як
відомо, тангенс кута діелектричних
втрат конденсатора можно визначити як:
![]()
![]() але напруги на
опорі та конденсаторі дорівнюють:
але напруги на
опорі та конденсаторі дорівнюють:
Тоді:
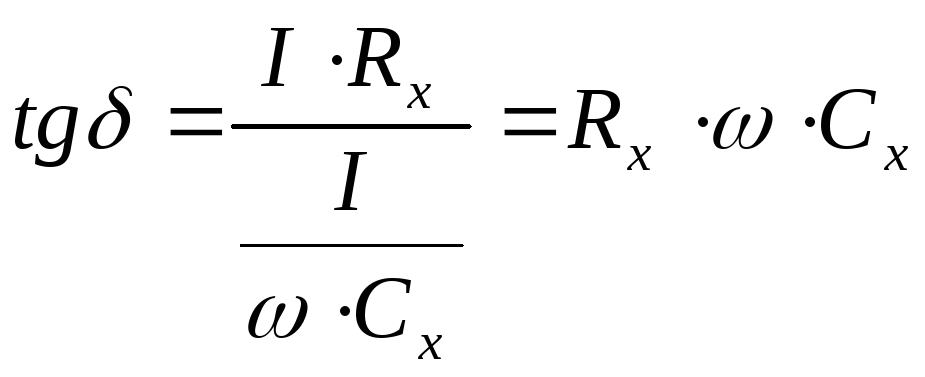
Пiдставляючи значення Rx та Сх, отримаємо :
![]()
При постійних значеннях і СО опір Rо можна проградуювати у значеннях tg .
Мост для вимiрювання iндуктивностi та
добротностi котушок
Такий мост має вигляд:
 Рівняння
баланса мосту :
Рівняння
баланса мосту :
![]() ;
;
Перетворимо:
![]() ;
;
Звідси :
![]()
![]() 2
.
2
.
Для вимірювання добротностi :

Добротніть визначається:
![]() але
але
![]() ;
;
звідси:
![]() ,
,
п![]() ідставляємо
значення, Rx
та
Lx
,
отримуємо
:
ідставляємо
значення, Rx
та
Lx
,
отримуємо
:
Вимiрювальнi мости звичайно комплектуються входом для вимiрювання Rx (вимiрювання на постiйному струмi ) та входом вимiрювання Сх , Lx , Q , tg (на змінному струмі).
Трансформаторні вимірювальні мости для вимiрювання
комплексних опорiв
Цi мости вiдрiзняються вiд вище розглянутих присутнiстю iндуктивно -зв'язаних плечей у диагоналi джерела живлення , або ж у вимiрювальнiй диагоналi.

а) у диагоналi джерела живлення;
б) у вимiрювальнiй диагоналi.
Якщо у схемi а) параметри плечей пiдiбрани таким чином , щоб напруги у вторинних обмотках трансформатору дорівнювали по величині та фазі напругам у плечах 1 та 2 , то струм через нуль- індікатор дорівнює нулю.
Напруга у вторинних обмотках пропорційна кількості витків обмоток, отже умовою рівноваги мосту буде :
![]()
де m і n – кількості витків вторинних обмоток трансформатора.
Це ідеальна умова рівноваги трансформаторного мосту, так як не враховуються потоки розсіювання обмоток.
Рівноваги такого мосту можна домагатися зміною відомого комплексного опору, або зміною кількості витків обмоток трансформатора. У цьому випадку трансформатор повинен мати спеціальну конструкцію. Можливість врівноваження зміною кількості витків має важливе значення, так як можна отримати цифрову форму відліку величини, що вимірюється.
Також за допомогою трансформаторних мостів вимірюють ‘ємність, індуктивність та різні неелектричні величини: рівні, переміщення і т.д.
Автоматичний мост для вимірювання
активного опору
Мост застосовується для отримання неперервних показань і реєстрації величини, яка вимірюється, та автоматичного керування виробничим процесом.
У стані рівноваги мосту напруга у вимірювальній діагоналі дорівнює нулю , тому реверсивний двигун РД нерухомий. При зміні опору Rx виникає падіння напруги у вимірювальній діагоналі. Воно підсилюється підсилювачем П та надходить на реверсивний двигун, який пересуває движок реостата до встановлення балансу мосту і одночасно пересуває стрілку вимірювального прилада ВП.
Такі мости застосовують для автоматичного регулювання процесів, наприклад, температури – коли замісь Rx встановлен терморезистор або термопара. В промисловості використовують автоматичні мости типів: КВМ – 1, КСМ- 1, КСМ –2 , КСМ – 3 , КСМ – 4 . Похибка цих мостів коливається у межах ( 0.25 – 1) %.

ВП – вимірювальний прилад; РД – реверсивний двигун; П – підсилювач;
Rx - невідомий опір; R1, R2, R4 - відомі опори; R3 – змінний опір.