

Міністерство освіти і науки України
Полтавський національний технічний університет імені Юрія Кондратюка
Кафедра автоматики та електропривода
45.19.12.03
ЗАВДАННЯ ДЛЯ ВИКОНАННЯ
КУРСОВОГО ПРОЕКТУ
з дисципліни
„Електропривід і автоматизація верстатів автоматів”
Напрям підготовки 0922 – Електромеханіка
Спеціальність Електромеханічні системи автоматизації та
електропривод
Освітньо-кваліфікаційний рівень Спеціаліст (Магістр)
Розробив: старший викладач М.В. Пугач
Затверджено на засіданні
кафедри автоматики і електропривода,
протокол № 8 від 22.12.2011 р.
Завідувач кафедри
автоматики та електропривода
Полтава 2011
ЗМІСТ
Вступ 3
1. СИНТЕЗ ЦИФРОВОЇ ЧАСТИНИ ПОЗИЦІЙНОЇ СЛІДКУЧОЇ СИСТЕМИ З ЦИФРОВИМ ПРОГРАМНИМ КЕРУВАННЯМ5
1.1. Проектування цифрової частини 5
1.2. Вибір типу датчика положення 6
1.3 Вибір структури зрівняльного пристрою 7
1.4. Побудова перетворювача цифра-аналог (ЦАП) 8
2. ПРОЕКТУВАННЯ АНАЛОГОВОЇ ЧАСТИНИ ПОЗИЦІЙНОЇ СЛІДКУЮЧОЇ СИСТЕМИ9
2.1. Навантаження приводу ПССПК 9
2.2. Вибір виконавчого двигуна та редуктора 11
2.3 Вибір підсилюючих та корегуючих елементів ПССПК 13
3. БЛАНК ЗАВДАННЯ16
4. ВАРІАНТИ ЗАВДАНЬ НА КУРСОВИЙ ПРОЕКТ17
РЕКОМЕНДОВАНА ЛІТЕРАТУРА20
ВСТУП
Позиційні електроприводи (ЕП) переміщують робочий інструмент або оброблювану деталь з одного положення в інше за заданою програмою з необхідною точністю. Вони застосовуються в промислових роботах, збірних автоматах, деревообробних верстатах, у верстатах з числовим програмним керуванням (ЧПК) (координатно-розточних, координатно-свердлильних, токарних, стругальних, фрезерних, шліфувальних та інших).
Головне, що характеризує позиційні ЕП - це точність відпрацювання заданого програмою переміщення або точність зупинки в заданій позиції. При цьому, як правило, важлива не траекторія руху, а факт досягнення об’єктом заданої координати з максимально можливою швидкістю. Однак, вимога сталості швидкості переміщення (при широкому діапазоні її зміни), збільшення точності контрольованого переміщення, бажання утримати об’єкт у заданій позиції після її досягнення, не зважаючи на можливий вплив зовнішніх збурень, приводить до необхідності використання в позиційних ЕП високоточних слідкуючих систем систем (СС).
Позиційна система може бути або розімкненою, або замкненою. В розімкнених системах використовуються крокові двигуни. Переміщення виконавчого пристрою в цьому випадку залежить від числа імпульсів, поданих на обмотку двигуна, а точність оброблення позиції не контролюється.
Позиційний ЕП, який має замкнену структуру , саме і являє собою позиційну стежучу систему (ПСС). З виконавчим пристроєм зв’язується датчик переміщення, і керування двигуном ведеться за розузгодженням між заданим та дійсним значенням позиції. Двигун зупиняється як тільки розузгодження буде відпрацьоване (дорівнюватиме нулю). Тим самим забезпечується контроль точності позиціювання. При відпрацюванні заданого переміщення можливе також регулювання швидкості або зміна регульованої швидкості в процесі робочих рухів.
Цикл роботи ПСС з цифровим програмним керуванням (ЦПК) (або скорочено ПССПК) складається із таких етапів:
програмне задання позиції або величини переміщення;
контроль переміщення або установлення в задану позицію;
точна зупинка в заданій позиції.
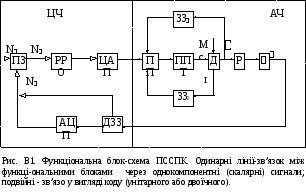
У ПСС застосовуються як двигуни постійного струму, так і двофазні асинхронні двигуни (при відносно малих рівнях потужності). В даному посібнику розглядається задача проектування ПССПК. Функціональні блок-схеми ПССПК містять цифрову (ЦЧ) і аналогову (АЧ) частини
(рис. В1).
Цифрова частина системи виконує обробку введеної в ППС цифрової інформації і, на основі цього оброблення, керує виконавчою (аналоговою) частиною як в організації відпрацювання величини переміщення, так і в заданні необхідних режимів роботи системи. До цифрової частини ПССПК відносяться: пристрій зрівнюваня (ПЗ), датчик зворотнього зв’язку (ДЗЗ), перетворювач аналог-цифри (АЦП) (при використанні аналогового ДЗЗ), регістр різниці і обмеження (РРО), перетворювач цифри-аналог (ЦАП).
Вхідний сигнал ПСС - задане значення кута позиціювання , яке поступає від програмного пристрою у вигляді двійкового коду N. На виході АЦП виробляється цифровий сигнал N, який відповідає моментальному значенню регульованої величини кута повороту виконавчого валу в тактові моменти часу.
У кожному тактовому інтервалі ПЗ виробляє сигнал розузгодження у вигляді двійкового коду N. Протягом тактового інтервалу РРО фіксує сигнал розузгодження N ³ зменшує його розрядність, приводячи її у відповідність до розрядності ЦАП.
На виході ЦАП виробляється аналоговий сигнал, який являє собою вхідний сигнал для АЧ.
До аналогової (виконавчої) частини ПССПК відносяться: попередній підсилювач (ПП), підсилювач потужності (ППТ) двигун (Д), редуктор (Р). Крім того, можуть використовуватися різні коригувальні пристрої, зворотні зв’язки (наприклад, ланка зворотнього зв’язку за швидкістю двигуна ЗЗ, ланка зворотньго зв’язку за струмом двигуна ЗЗ), модулятор та інші елементи.
І нтегрувальна
ланка введена для можливості переходу
при дослідженні системи від швидкостіобертання
валу двигуна до величини кута
повороту цього валу. Оскільки вони
зв’язанні відношенням =
dj /dt , то
нтегрувальна
ланка введена для можливості переходу
при дослідженні системи від швидкостіобертання
валу двигуна до величини кута
повороту цього валу. Оскільки вони
зв’язанні відношенням =
dj /dt , то
Збудженням ПСС є статичний момент на валу двигуна Мс.
1. Синтез цифрової частини позиційної слідкучої системи з цифровим програмним керуванням
1.1. Проектування цифрової частини
Проектування цифрової частини ПСС можна розділити на три етапи:
1) вибір структурної схеми системи програмного керування (СПК) ;
синтез функціональної схеми СПК;
3) розроблення принципової схеми СПК;
На кожному етапі проектування вирішуються свої самостійні задачі, однак, оскільки наступні етапи базуються на попередніх, то обгрунтованість рішень, що приймаються на першому та другому етапах, відіграють значну роль в успіху проектування системи в цілому.
На першому етапі для проектованого типу системи уточнюються технічні вимоги, систематизуються фактори, що впливають на побудову системи, визначаються можливі варіанти структурних схем. Спочатку проводиться якісна оцінка різних варіантів, кожен з яких повинен забезпечувати виконання всіх технологічних вимог, що ставляться перед системою. Користуючись певним критерієм оцінки структурної схеми (ефективність,складність, швидкодія та ін.), роблять остаточний вибір її варіанту.
Перш ніж перейти до синтезу функціональної схеми СПК, необхідно скласти алгоритмічне уявлення роботи системи.
На етапі розроблення принципової схеми проводиться вибір типів елементів, з яких компонується схема СПК. При цьому необхідно враховувати конкретні технічні характеристики системи: швидкодію в плані перероблення інформації та переміщення виконавчих пристроїв, надійність, габарити, масу, умови роботи та ін..
1.2. Вибір типу датчика положення
У ПССПК точність установки об’єкта в задану позицію визначається метрологічними параметрами вибраного датчика зворотного зв’язку (датчика положення). При цьому в ПСС широко застосовуються лінійні і кругові датчики шляхового контролю, а за фізичним принципом дії - фотоелектричні та індукційні датчики. Слід підкреслити, що вибір типу датчика впливає не лише на точність переміщення, а й на структуру вимірювальної частини системи.
Незалежно від фізичних принципів, покладених в основу роботи будь-якого датчика, всі вони діляться на дві групи:
абсолютні датчики з монотонною зміною фізичного параметру, коли кожному його значенню відповідає лише одне положення робочого органу;
циклічні датчики з періодичною зміною фізичного параметру, коли кожному його значенню відповідає декілька положень робочого органу.
За видом вихідного сигналу датчики діляться на дискретні й аналогові. У свою чергу, дискретні датчики діляться на унітарно-кодові (сигнал у вигляді послідовності імпульсів) та кодові (двійковий цифровий код ).
Послідовність вибору ДЗЗ повинна бути такою:
виходячи з вимог до системи, визначають датчики, які задовольняють ці вимоги;
розглядають можливі варіанти структурних схем цифрової частини ПСС;
проводять якісну та кількісну оцінку цих варіантів;
4) роблять висновки і визначають найбільш прийнятний тип датчика.
Для грубого відліку частіше використовують імпульсні або кодові датчики положення, а для більш точного - аналогові та імпульсні ДЗЗ.
У системах з розрізнювальною здатністю вищою за 0,01 мм застосовуються в основному лінійні датчики, а в системах з меншою точністю – кругові датчики. Основною перевагою лінійних датчиків є відсутність механізму перетворення лінійного переміщення робочого органу в обертання вхідного валу кругового датчика, оскільки похибки цього механізму становлять 70-80% від загальної похибки пристрою відліку.
При задаванні керуючої програми у вигляді приростів координат найбільш прийнятним є використання унітарно-кодового датчика, а при задаванні переміщень в абсолютних координатах-кодового датчика. При використанні аналогового індукційного датчика необхідна наявність АЦП для перетворення амплітуди або фази аналогового синусоїдального сигналу в унітарний (фазо-імпульсний принцип роботи АЦП) або двійковий код.