

СУАЭ / № 7
.docxДисциплина: ПП.03.05 «Системы управления автоматизированного
электропривода»
Блок модулей 2 (ПП.03.05.01) «Системы автоматизированного управления
электроприводом»
Модуль 2.2 (3 ПФ.С.11.ЗР.З.01.01) «Замкнутые системы автоматизированного
управления электроприводом»
Лекция № 7
«Общие сведения о замкнутых системах автоматизированного управления
электроприводом. Элементы и устройства замкнутых систем управления
электроприводом, классификация элементов замкнутых систем»
План:
1. Общие сведения о замкнутых системах автоматизированного управления
электроприводом.
2. Классификация элементов автоматизированного электропривода.
Пункт 1 - Общие сведения о замкнутых системах автоматизированного
управления электроприводом.
Системы замкнутого управления электроприводами предназначены так же, как и рассмотренные ранее более простые разомкнутые системы релейно-контактного управления, для обеспечения автоматического режима пуска, торможения, реверсирования, регулирования скорости, момента и т. д. Однако эти системы позволяют сформировать указанные режимы управления желаемым образом и связать их более точно с требованиями технологического процесса, обусловленного работой производственных механизмов.
Замкнутой автоматической системой называется такая система, в которой регулируемый параметр измерения используется и для целей регулирования. Принципиальной особенностью замкнутых автоматических систем является изменение знака в замкнутом контуре, т. е. замыкание контура с отрицательной обратной связью. Принцип отрицательной обратной связи является основополагающим принципом построения всех замкнутых автоматических систем.
Замкнутые схемы приводов образуются посредством разных обратных связей с использованием тех или иных усилителей. Назначение обратных связей состоит в том, чтобы автоматически поддерживать определенное соотношение между входной и выходной величинами при наличии возмущающих воздействий (например, изменении нагрузки).
Применение обратных связей в электроприводах позволяет значительно расширить диапазон регулирования скорости, повысить жесткость механических характеристик, улучшить качество переходных процессов и устойчивость работы.
Обратная связь представляет собой канал передачи и преобразования информации с выхода системы регулирования или ее узлов на вход с целью формирования результирующего сигнала управления.
В зависимости от знака сигнала обратная связь бывает положительной или отрицательной. Если сигнал обратной связи суммируется с сигналом задания, то обратная связь называется положительной. Если сигнал обратной связи вычитается из задающего сигнала, то обратная связь называется отрицательной.
Имеются разного рода обратные связи, как по выполняемым функциям, так и по способу исполнения. По разным признакам различают следующие типы обратных связей:
1) в зависимости от физической величины, передаваемой на вход - обратные связи по скорости, положению, току, напряжению, вращающему моменту;
2) по относительному знаку передаваемой величины - положительные и отрицательные.
3) в зависимости от области, в которой проявляется обратная связь - жесткая, действующая в установившемся и в переходном режимах; гибкая - действующая только в переходных режимах; с отсечкой - работающая, когда переменная отклоняется от заданного значения.
По устройству обратные связи подразделяются на:
- параметрические (статические электрические цепи);
- электромеханические (тахогенераторы), пассивные, без собственных источников энергии, и активные с источниками энергии.
Рассмотрим в качестве примеров некоторые схемы обратных связей.
Выполнение обратных связей по току и напряжению в двигателях постоянного и переменного тока показано на рис. 1, а, б. Обратная связь по току нагрузки или вращающему моменту может вводиться также посредством тензометрического датчика.
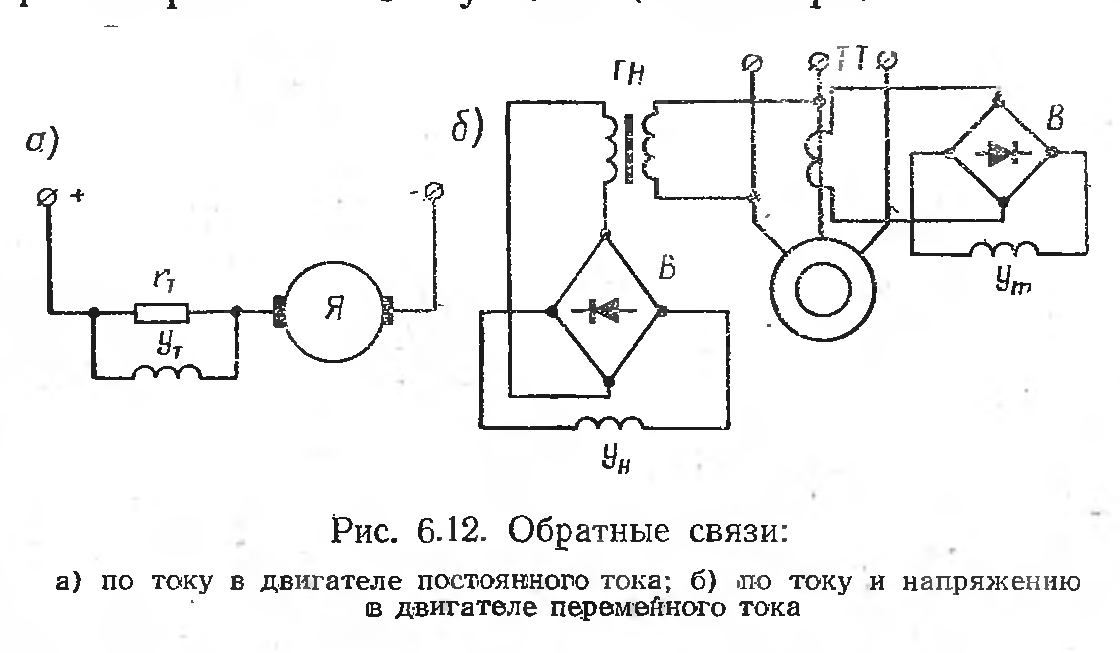
Рисунок 1 – Обратные святи:
а) по току в двигателе постоянного тока;
б) по току и напряжению в двигателе переменного тока.
По типу выходной регулируемой координаты замкнутые системы электропривода подразделяются на следующие группы:
1 - Системы регулирования момента (усилия). К этому классу относятся, например, электроприводы систем натяжения металла в листопрокатном производстве в металлургии или системы натяжения пленки в химико-технологическом производстве тонких пленок. Закон регулирования момента (усилия) рабочего органа определяется технологическим процессом.
2 - Системы регулирования скорости. Они используются в электроприводах многих технологических машин: металлообрабатывающих станках, прокатных станах и многих других. Системы регулирования скорости делятся на две большие группы.
3 - Системы стабилизации скорости, у которых скорость поддерживается постоянной, несмотря на воздействие возмущений. К таким системам относятся, например электроприводы бумагоделательных машин.
4 - Системы управления скоростью, у которых скорость рабочего органа регулируется с высокой точностью в широких пределах в соответствии с требуемым характером протекания технологического процесса. Это, например, электроприводы экскаваторов, подъемно-транспортных машин и другие.
5 - Системы регулирования положения рабочего органа. Эти системы используются в электроприводах нажимных винтов прокатных станов, в роботах и манипуляторах и многих других промышленных установках. В этих системах положение рабочего органа регулируется с заданной точностью в соответствии с требованиями технологического процесса. Существует два типа замкнутых систем электропривода регулирования положения - системы позиционирования и следящие системы.
Системы позиционирования - это такие системы, в которых задается исходное и конечное положение рабочего органа, а траектория перемещения не контролируется.
Следящие системы электропривода - это системы регулирования положения, в которых задается и непрерывно контролируется вся траектория движения рабочего органа. Рабочий орган должен повторять заданную траекторию с требуемой точностью.
Пункт 2 - Классификация элементов автоматизированного электропривода.
Под термином «элемент» автоматизированного электропривода понимается входящее в него устройство, выполняющее определенную функцию управления, в соответствии с которой входное воздействие элемента преобразуется в выходное.
АЭП можно представить в виде совокупности силовых и управляющих элементов (рис. 2). Силовые элементы преобразуют, регулируют и приводят к рабочему органу (РО) механизма основной поток энергии. Управляющие элементы формируют, преобразуют и подводят сигналы управления к силовым элементам. К силовым элементам относятся управляемые преобразователи энергии (УПЭ), электродвигатели (М), передаточные механизмы (ПМ), рабочие органы машин и механизмов.
Управляющие элементы можно разделить на две группы:
1) элементы систем управления вентилями УПЭ, которые преобразуют сигнал управления с выхода системы автоматического управления (САУ) в открывающие импульсы;
2) элементы САУ, формирующие задающие и управляющие воздействия и определяющие статические и динамические свойства АЭП.
По функциональному признаку элементы второй группы делятся на следующие виды:
- регуляторы (Р) - вычисляют разность сигналов задания и обратной связи (рассогласование) и на ее основе формируют управляющее воздействие, приводящее регулируемую координату к заданному значению;
- датчики (Д) - преобразуют управляемую координату в электрический сигнал, используемый как сигнал обратной связи;
- задающие элементы (ЗЭ) - формируют задающие воздействия, определяющие технологическую программу работы АЭП;
- согласующие элементы (СЭ) - согласуют выходные и входные координаты соединяемых элементов по роду тока, виду и уровню сигналов и т.п.
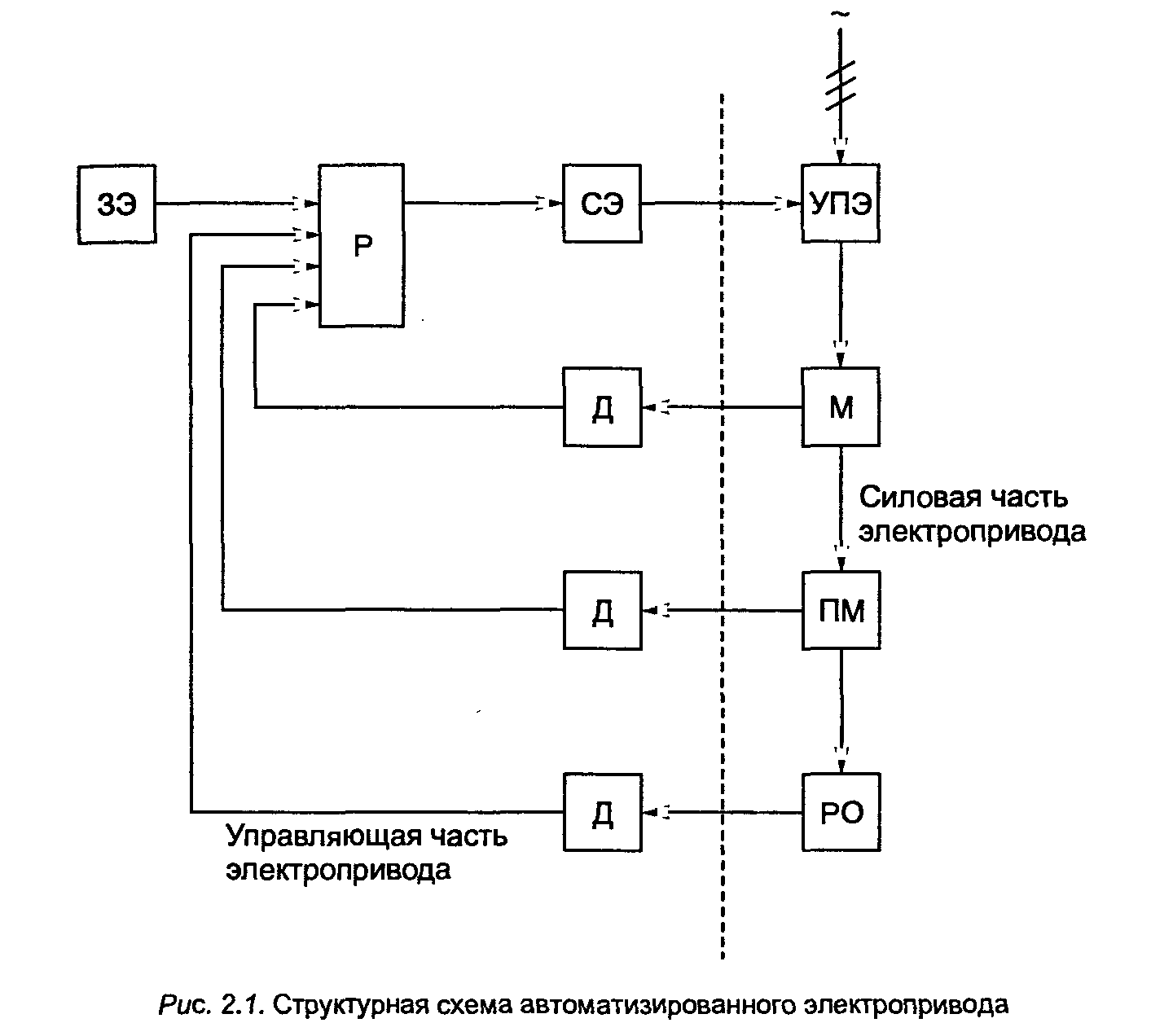
Рисунок 2 – Структурная схема автоматизированного электропривода
Контрольные вопросы для закрепления изученного материала:
1. Поясните, как Вы понимаете термин «Замкнутые системы управления электроприводом»?
2. Какой принцип связи является основополагающим при построения всех замкнутых автомати-
ческих систем.
3. Как Вы понимаете термин «Обратная связь»? Какие появляются возможности в системах
управления ЭП при применении обратных связей?
4. Произведите классификацию обратных связей.
5. На какие группы подразделяются замкнутые системы электропривода по типу выходной
регулируемой координаты?
6. Под термином «элемент» автоматизированного электропривода понимается…..?
7. Для чего используются силовые элементы в замкнутой схеме управления?
8. На какие две основные группы разделяют управляющие элементы в замкнутой схеме
управления?
9. На какие виды делятся элементы САУ, формирующие задающие и управляющие воздействия?
Источники для дополнительного изучения материала лекции:
1. Петренко Ю.Н.Системы автоматизированного управления електроприводами – Минск: Новое
знание, 2004 г., стр. 64 – 65.