

АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
.pdfСБОРНИК НАУЧНЫХ ТРУДОВ НГТУ. – 2011. – № 1(63). – 23–40
УДК 621.378.001
АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ*
В.А. ЖМУДЬ, Д.О. ТЕРЕШКИН, О.В. ПРЫТКОВА
Критически обсуждаются различные классификации адаптивных систем, предлагается современная классификация, обсуждаются достоинства и недостатки различных типов и классов адаптивных и самонастраивающихся систем, описана оригинальная схема адаптивной системы, очерчены перспективы развития этого направления.
Ключевые слова: адаптивные системы, самонастраивающиеся системы, регуляторы.
ВВЕДЕНИЕ
Разработка самонастраивающихся (адаптивных) систем (СНС) автоматического управления привлекала исследователей задолго до создания предпосылок для их широкого внедрения. Различные структуры и алгоритмы СНС предлагались в общих чертах без конкретизации принципов действия отдельных блоков. При классификации СНС в разной литературе приоритет отдавался разным критериям, что привело к их существенному несовпадению. Современный уровень техники позволяет реализовать сколь угодно сложные алгоритмы управления почти без удорожания системы в целом за счет применения цифровых регуляторов на основе микропроцессоров. Это требует разработки последовательной классификации различных видов СНС, наполненной конкретными схемами их реализации с наиболее полной детализацией основных блоков и разъяснением их принципов действия. Для различных вариаций применений необходим анализ их относительных преимуществ и недостатков.
1. ИЗВЕСТНЫЕ КЛАССИФИКАЦИИ СНС
Классификация систем из [1, с. 9] далека от идеала. Некоторые системы должны входить в несколько классов этой классификации, другие системы не могут быть отнесены ни к одному из данных пунктов. Некоторые пункты, по-
* Статья получена 3 февраля 2011 г.
Работа выполнена при поддержке Министерства образования и науки в рамках ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009–2013 гг., мероприятие 1.2.1, конкурс 81П, ГК № П694 от 12.08.2009.
24 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
видимому, составляют пустое множество. Действительно, если для отнесения к классу 1-a-i источником информации должна служить характеристика объекта, но при этом не может служить таковым источником ни характеристика входных сигналов, ни характеристика выходных сигналов (потому что иначе такая система должна быть отнесена к классу комбинированных), то такую систему трудно вообразить. По-видимому, объект должен сам каким-то образом сообщать собственные характеристики, причем не по его выходному сигналу. Какая может быть связь, не использующая выходной сигнал, понять сложно.
Классификация систем [2, с. 480] также далека от идеала, поскольку неполная. Класс 1-a объединяет принципиально разные системы, класс 1-b также предполагает наличие объектов, сообщающих о своих динамических характеристиках без использования их выходных сигналов. Грань, проводящая различия между классами 2-b «СНС с автоматической настройкой структуры системы» и 2-c, «СНС с автоматическим изменением алгоритма функционирования» в настоящее время неактуальна: переключение структур и алгоритмов в случае реализации на основе цифровой техники практически не отличается. Классификация в пределах раздела 3 не отвечает главному требованию к любой классификации: каждый объект должен быть отнесен только к одному классу. Первые два пункта, 3a и 3b составляют полное множество: контур может быть либо разомкнутым, либо замкнутым, если имеется комбинация, то это означает, что все-таки имеется хотя бы один замкнутый контур. Тем более трудно понять, что в этом случае следует отнести к «другим».
Классификация систем [3, с. 404] тоже далека от идеала. Эту же классификацию рекомендуют к использованию авторы книги [4]. Не вполне понятно, к какому из классов, 1.1 (Поисковые СНС) или 1.2 (Беспоисковые СНС), следует относить системы со следящей самонастройкой. Можно предположить, что все рассматриваемые далее системы должны быть отнесены к классу 1.1, хотя эти структуры имеют весьма существенные отличия друг от друга, но среди них имеются системы, характеризующиеся весьма существенным сходством между собой, поэтому классы поисковых и, возможно, следящих СНС следует разделить на ряд подклассов.
Классификация систем [5, с. 253] также неидеальна. Чаки Ф. приводит классификацию из [6] в следующем виде.
1.Пассивные адаптивные системы (выполняет функции даже при значительных внешних воздействиях без изменения структуры и параметров).
2.Системы с адаптацией по входному сигналу (параметры подстраиваются к свойствам входных сигналов).
Адаптивные системы автоматического управления |
25 |
3.Экстремальные системы (поисковыми процедурами подстраиваются к экстремумам функций или функционалов).
4.Системы с адаптацией переменных системы.
5.Системы с адаптацией характеристик системы (осуществляют коррекцию изменений передаточных характеристик).
Эта классификация наиболее последовательно и богато проиллюстрирована примерами, но и она далека от совершенства. Ниже мы покажем, что первые два класса целесообразно объединить.
Классификация не должна в пределах одного перечня классов содержать классы, формируемые по разным признакам. Так, к классу 2 относятся системы, осуществляющие адаптацию по входному сигналу, т. е. по признаку используемого источника информации. К классу 4 и 5 отнесены системы по принципу воздействия на системы, т. е. одна и та же система может быть одновременно отнесена и к классу 2, и к классу 4 или 5.
По вопросу классификации адаптивных и самонастраивающихся систем окончательная, наиболее полная, последовательная и удовлетворяющая всех специалистов классификация будет принята еще не скоро.
Одни авторы отождествляют самонастраивающуюся и адаптивную систему, другие считают только один из указанных терминов обоснованным, а второй предлагают из терминологии убрать.
Для приближения к решению этого вопроса целесообразно рассмотреть суть термина «самонастраивающийся» уже на основе рассмотренных выше многочисленных схем, из которых далеко не все были реализованы на практике.
Настройкой регулятора называют все действия, которые разработчик осуществляет после того, как система в целом уже готова, но параметры регулятора еще не вычислены. В результате этих действий определяются параметры регулятора. При этом оператор осуществляет такие исследовательские работы, которые могут быть записаны в виде формальных процедур. Важной характеристикой этого этапа является отсутствие в некоторых случаях ограничительных требований к функционированию объекта в ходе его настройки. Разработчик может позволить себе реализовать самые различные режимы вплоть до полной потери устойчивости. Зачастую длительность таких режимов и их свойства никак не регламентируются, т. е. у разработчика имеется полная свобода действий при одном условии: они не должны продолжаться бесконечно, а обязаны закончиться предоставлением приемлемой системы путем определения наилучшей настройки регулятора.
При такой постановке вопроса не обязательно объект является нестационарным. Всего лишь его математическая модель до начала этапа настройки не
26 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
была достаточно полно известной. Если бы она была известна, то настройка уступила бы место точному расчету.
В итоге настройки математическая модель объекта не обязательно должна стать известной. Разработчику ставится задача настроить систему, а не исследовать объект, исследование объекта – это лишь путь решения задачи, но он не единственный.
Поэтому и действия разработчика могут происходить по различным вариантам процедур. Один вариант состоит в полной идентификации объекта, последующем расчете регулятора, его реализации и испытании. При неудачном испытании процедура дополняется уточняющей идентификацией, уточняющим расчетом и т. д.
Если регулятор снабжен интеллектуальной системой, которая решает все эти задачи самостоятельно в автоматическом режиме, такую систему следует назвать именно «самонастраивающейся», поскольку она сама реализует алгоритм настройки.
При этом объект не обязательно нестационарный.
Если объект все же не стационарный, а процедура самонастройки реализована так умело, что не выводит объект за рамки допустимых его режимов даже при условии передачи всей системы в штатный режим эксплуатации, то система может сохранять функции самонастройки не только до начала ее эксплуатации, а и в ее ходе. То есть система может сама определять изменения параметров объекта и осуществлять адекватныеизменения параметров регулятора.
Такую систему можно называть и самонастраивающейся, и адаптивной. Действительно, система адаптируется к изменениям объекта, работая по
принципу самостоятельного выполнения функций настройки регулятора. Если система в ходе функционирования опирается на результаты перво-
начальной настройки, осуществленной по иным алгоритмам, нежели она действует в штатном режиме, то называть ее самонастраивающейся, возможно, не следует.
Такая система сначала настраивается вручную или автоматически, но другим способом. После этого она действует так, чтобы только сохранить уже приобретенные свойства устойчивости. Без первоначальной настройки такая система работать не может. Такую систему следует скорее называть адаптивной, а не самонастраивающейся.
И все же методы достижения адаптивных свойств настолько тесно переплелись с методами обеспечения самонастраивающихся процедур, что вводить в рамках одной публикации эти тонкие различия нам представляется нецелесообразным на настоящем этапе развития этого направления техники. Действительно, патентный поиск или составление обзора по любому из указанных направлений, будь то адаптивные или самонастраивающиеся системы,
Адаптивные системы автоматического управления |
27 |
требует внимательного рассмотрения описаний и тех и других систем и структур. Поэтому далее мы будем пользоваться термином «самонастраивающиеся системы» (СНС), имея в виду, что к этому классу могут быть отнесены и адаптивные системы или, наоборот, СНС могут быть отнесены к подклассу адаптивных систем.
2. ВАЖНЕЙШИЕ ПРИЗНАКИ КЛАССИФИКАЦИИ
2.1. Адаптация по входному сигналу
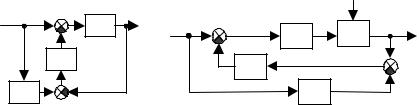
Классификация должна относить любой метод только к одной группе, включая «комбинированный», если в какой-либо системе применен более чем один метод. В этом случае в зависимости от условий и целей задачи можно исключить из рассмотрения целые подклассы СНС, сосредоточившись только на актуальных для данной задачи схемотехнических решениях. По сути формулировки раздела 1 пассивные системы – это системы с пониженной чувствительностью к внешним воздействиям на параметры объекта, т.е. робастные системы. Приведенная иллюстрация дает основания отнести эту систему к п. 2, поскольку в этой структуре адаптация основана на функциональной связи с входным сигналом. В качестве примера дана система, показанная на рис. 1 [5, с. 254]. Подобные структуры часто встречаются в литературе. В книге [7] показано, что подобная система, как видно из рис. 2, преобразовывается в эквивалентную систему, представленную на рис. 3, содержащую в основном контуре элементы регулятора и объект, а также имеющий эквивалентный низкочастотный фильтр на входе. В случае большого коэффициента k усилителя 4 выходной сигнал системы Y(t) повторяет выходной сигнал эталонной модели YM(t). В реальных системах величина k ограничивается условиями устойчивости системы, и требуемое равенство достигается лишь приблизительно.
|
|
|
F |
|
1 |
V |
2 |
1 |
Y |
|
|
|
||
2 |
|
4 |
|
|
|
|
|
|
|
3 |
|
|
3 |
YM |
|
|
|
||
Рис. 1. СНС [5, с. 254, рис. 1.1-1]: |
|
Рис. 2. СНС [7, с. 444, рис. 4.42,а]: |
|
|
1 – объект; 2 – регулятор в обратной 1 – объект; 2 – регулятор; 3 – эталонная модель (замксвязи; 3 – эталонная модель замкнунутой системы); 4 – усилитель с большим коэффици-
той системы ентом, реализующий глубокую обратную связь
28 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
Главный недостаток таких систем: при нулевом входном сигнале контур адаптации практически не имеет смысла. В качестве стабилизирующей системы такая структура неэффективна. Фактически для эффективности такой структуры требуется обеспечить высокое быстродействие контура из элементов основного контура, и если это удается, то действие ветви, подключенной к входному сигналу, не требуется, она лишь осуществляет фильтрацию сигнала задания. Если же это не удается, то действие этой ветви не спасет ситуацию. Проблема в том, что в этом контуре имеется один элемент нестационарный (объект), а другие остаются неизменными. Поэтому свойства контура не являются адаптивными. Адаптивные свойства эквивалентного фильтра, включенного между сигналом задания и сумматором, несущественны, поскольку они лишь изменяют вид сигнала предписанного значения для выходной величины объекта, а устойчивость и качество основного контура управления остаются неконтролируемыми и не исправляются адаптивным контуром. То есть если контур может утратить устойчивость при изменении параметров объекта, такая система этой проблемы не решает.
|
|
|
|
F |
V |
|
2 |
1 |
Y |
|
|
|
||
3 |
4 |
5 |
|
|
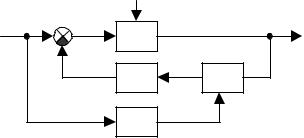
Рис. 3. Эквивалентная схема самонастраивающейся системы, рис. 2, [7, с. 444, рис. 4.42, а]:
1 – объект управления; 2 – регулятор; 3 – эталонная модель (замкнутой системы); 4 – усилитель с большим коэффициентом; 5 – точная копия усилителя с большим коэффициентом
Мы предлагаем первые два подкласса классификации Чаки объединить по следующим признакам в единый класс «Тип 1. Адаптация по входу и (или)
возмущению».
1.Адаптация осуществляется по анализу входного сигнала (задания) и выходного сигнала системы и (или) по анализу сигнала возмущения. Как правило, в адаптивном контуре определяется отличие выходного сигнала объекта от выходного сигнала идеальной модели системы, и обратная связь стремится осуществить их наилучшее совпадение.
2.Сигнал управления, подаваемый на объект, как правило, не анализиру-
ется.
Адаптивные системы автоматического управления |
29 |
Этот тип можно разбить на два класса: 1.1. СНС с эталонной моделью замкнутой системы; 1.2. СНС с программным изменением параметров регулятора (по заданным зависимостям свойств объекта от входного сигнала и возмущения) в разомкнутом контуре. Ниже приведен перечень примеров таких систем из литературы.
СНС из книг [8, с. 395, с. 394, 395], [1, с. 13, с. 18, с. 23], [2, с. 482–483, с. 485–486], [9, с. 520], [10, с. 56, с. 204], [3, с. 486], [7, с. 441, с. 443].
Во всех этих примерах можно обнаружить указанные признаки их структуры. Математическая модель объекта не уточняется непосредственно в ходе работы системы.
|
|
|
F |
v |
U |
1 |
y |
|
|
|
5 4
YМ
3
Рис. 4. Структурная схема самонастраивающейся модели из книги [1, с. 23]:
1 – объект; 2 – вычитающее устройство; 3 – динамическая модель объекта; 4 – блок определения производной функционала Q(Yi) по управлению; 5 – интегратор
В системе, рис. 4, блок 4 осуществляет умножение выходного сигнала на его модель и усредняет результат, утверждается, что результат равен производной этого функционала по управлению u(t). Все же по признакам структурной схемы эту систему следует отнести к классу систем с адаптацией по входному сигналу, поскольку в случае постоянного сигнала v(t) (системы стабилизации), элемент 3 не может выполнять свои функции, следовательно, адаптивных свойств в такой системе в этом режиме не будет.
2.2.Системы со стабилизацией свойств основного контура без непосредственной идентификации модели объекта
Системы со стабилизацией свойств основного контура автоматическо-
го регулирования целесообразно выделить в тип 2. В таких системах нет идентификации объекта в явном виде. В них определяется изменение функ-
30 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
ции качества или иные параметры функционирования замкнутой системы в целом, и осуществляется изменение свойств регулятора так, чтобы качество этого контура сохранялось на заранее настроенном уровне или какая-нибудь характеристика качества достигала своего экстремального значения.
В этом типе можно выделить следующие классы.
1.Системы настройки на экстремум свойств контура: а) с пробной девиацией в виде сигнала, вносимого в контур; б) с пробной девиацией параметров регулятора; в) без девиации.
2.Системы поддержания заданного качества контура: а) с доведением до автоколебаний; б) с введением пробных колебаний; в) без колебаний.
Вне классификации остаются структурные схемы из литературы, приведенные в самых общих блоках без разъяснения принципа действия, по крайней мере, одного из них.
К таким системам можно отнести СНС из книг [1, с. 8, 2, с. 483, 10, с. 70]. В СНС [11, с. 381] в исходном состоянии возникают небольшие колебания. При изменении параметров объекта параметры автоколебаний изменяются. Регулятор содержит элементы, определяющие амплитуду автоколебаний, и осуществляет стабилизацию этой амплитуды. Такая СНС относится к типу 2,
классу 2.2.а.
В СНС [11, с. 377] в систему вводятся пробные колебания, величина остаточной амплитуды которых (из-за действия контура она уменьшается) детектируется синхронным детектором и стабилизируется путем соответствующих изменений коэффициента усиления регулятора в дополнительном контуре с отрицательной обратной связью. Эта СНС относится к типу 2, классу 2.2.б.
Основным недостатком этих двух систем является недостаточная точность их работы и недостаточная эффективность самонастройки. Недостаточная точность имеет место вследствие того, что в рабочем состоянии в системе должны происходить колебания. Недостаточная эффективность настройки возникает из-за недостаточно адекватной зависимости между настраиваемым параметром, которым является амплитуда колебаний, и действительным качеством настройки системы, которое связано с характеристиками ширины полосы рабочих частот, малости ошибки управления, устойчивости системы. Следствием этого является третий недостаток, который состоит в необходимости предварительной настройки системы по некоторым дополнительным критериям качества ее функционирования. Четвертым недостатком является узкая область применения этого метода, поскольку он эффективен только
вслучае, если единственным изменяющимся параметром объекта является его коэффициент усиления. Таким образом, такие СНС не могут обеспечить высокое быстродействие и высокую точность.

Адаптивные системы автоматического управления |
31 |
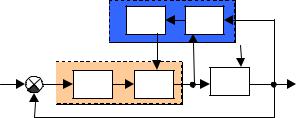
Нами разработано устройство, показанное на рис. 5 (заявка на патент, положительное решение). Эта СНС относится к типу 2, классу 2.1.б.
Поставленная задача решается за счет следующих усовершенствований: 1) девиация вносится не как сигнал в контуре, а девиации подвергается коэффициент усиления регулятора; 2) в системы введено устройство оценки качества. Настройка регулятора на наилучшее качество осуществляется действием дополнительного контура обратной связи, образуемого синхронным детектором, интегратором, нелинейным элементом, регулятором коэффициента и сумматором, а также генератором, выход которого соединен со вторыми входами синхронного детектора и сумматора. Повышение точности достигается устранением колебаний выходной величины в рабочем режиме.
Вход |
|
|
|
Выход |
X |
E |
1 |
U |
Y |
|
|
|
2 |
|
|
3 |
|
|
|
|
4 |
Z |
|
8 |
|
|
|
|
|
|
5 |
6 |
|
7 |
Рис. 5. СНС с девиацией коэффициента усиления:
1 – управляемый усилитель; 2 – объект; 3 – генератор; 4 – устройство оценки качества системы; 5 – синхронный детектор; 6 – интегратор; 7 – нелинейный элемент; 8 – регулятор коэффициента
Повышение эффективности достигается применением критерия, непосредственно связанного с показателем качества замкнутой системы, который вычисляется непрерывно или периодически в ходе функционирования системы. Эта система работает следующим образом. При исходных фиксированных параметрах объекта 2 управляемый усилитель 1 в качестве регулятора и обратная связь вместе с объектом образуют обычную систему автоматического управления. Управляемый усилитель 1 служит регулятором в основном контуре и обеспечивает требуемую точность и быстродействие этого контура, пока параметры объекта 2 остаются неизменными. В случае достаточно эффективной работы основного контура выходной сигнал объекта Y равен входному сигналу системы X, поэтому сигнал ошибки E на выходе вычитающего устройства равен нулю или пренебрежимо малой величине. Эта величина анализируется трактом, состоящим из устройства оценки качества системы 4, синхронного детектора 5, интегратора 6, нелинейного элемента 7, регулято-
32 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
ра 8 и сумматора. Поскольку в тракте присутствует нелинейный элемент типа «зона нечувствительности» или аналогичного вида, выходной сигнал которого равен нулю, если входной сигнал лежит в заранее заданном небольшом диапазоне вблизи нуля, то на вход регулятора 8 подается также нулевой сигнал, поэтому регулятор 8 не воздействует на управляемый усилитель 1, и этот усилитель не изменяет своего коэффициента усиления. Генератор 3 формирует гармонический сигнал, который поступает на вход синхронного детектора 5 и на вход сумматора. Выходной сигнал синхронного детектора, равный произведению его входных сигналов, в данном случае остается нулевым. Действие сигнала с выхода генератора 3, подаваемого на вход сумматора, состоит в том, что коэффициент усиления регулируемого усилителя 1 изменяется на небольшую добавочную величину, изменяющуюся по указанному гармоническому закону. Это небольшое изменение коэффициента усиления практически не влияет на действе основного контура управления. Нами путем моделирования показано, что в некоторых случаях такая модуляция коэффициента усиления регулятора даже оказывает стабилизирующее влияние на устойчивость системы автоматического регулирования.
2.3. Системы с эталонной моделью объекта
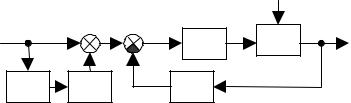
На рис. 6 показана СНС из книги [7, с. 443], которая представляет собой типичную систему с эталонной моделью объекта.
В отличие от системы с эталонной моделью, которая задает отклик всей системы в целом на входной сигнал v(t), в данной системе эталонная модель задает предписанный отклик объекта на входное воздействие, т. е. управляющий сигнал u(t). Нетрудно видеть, что условия работы данного контура не требуют, чтобы сигнал задания (предписанного значения для выхода) v(t)
|
7 |
6 |
5 |
|
|
|
UС |
U |
F |
V |
2 |
4 |
1 |
Y |
|
3 |
|
||
|
Рис. 6. СНС из книги [7, с. 443]: |
|
||
1 – объект; 2 – регулятор; 3 – желаемая модель прямого контура; 4 – обратная модель объекта управления; 5 – анализатор внутренних сигналов; 6 – вычислитель; 7 – корректирующее и вычислительное устройство